 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDuoMo: Dual Motion Diffusion for World-Space Human Reconstruction
Mar 03, 2026We present DuoMo, a generative method that recovers human motion in world-space coordinates from unconstrained videos with noisy or incomplete observations. Reconstructing such motion requires solving a fundamental trade-off: generalizing from diverse and noisy video inputs while maintaining global motion consistency. Our approach addresses this problem by factorizing motion learning into two diffusion models. The camera-space model first estimates motion from videos in camera coordinates. The world-space model then lifts this initial estimate into world coordinates and refines it to be globally consistent. Together, the two models can reconstruct motion across diverse scenes and trajectories, even from highly noisy or incomplete observations. Moreover, our formulation is general, generating the motion of mesh vertices directly and bypassing parametric models. DuoMo achieves state-of-the-art performance. On EMDB, our method obtains a 16% reduction in world-space reconstruction error while maintaining low foot skating. On RICH, it obtains a 30% reduction in world-space error. Project page: https://yufu-wang.github.io/duomo/
FRESA:Feedforward Reconstruction of Personalized Skinned Avatars from Few Images
Mar 24, 2025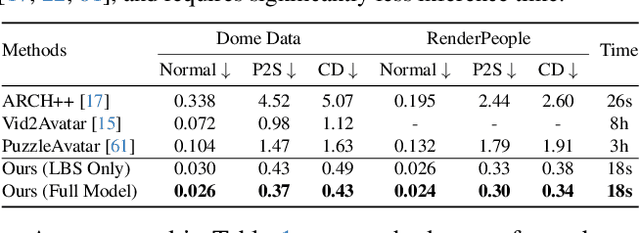
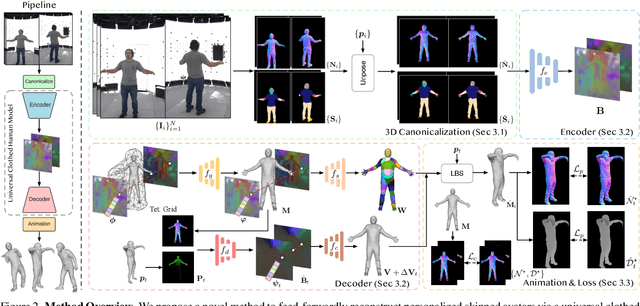
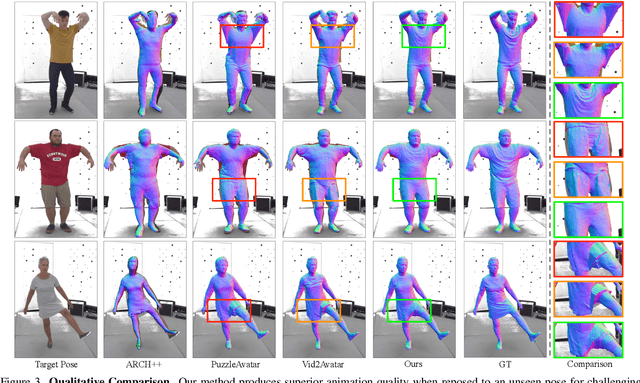
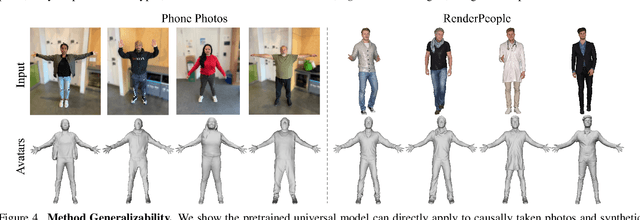
We present a novel method for reconstructing personalized 3D human avatars with realistic animation from only a few images. Due to the large variations in body shapes, poses, and cloth types, existing methods mostly require hours of per-subject optimization during inference, which limits their practical applications. In contrast, we learn a universal prior from over a thousand clothed humans to achieve instant feedforward generation and zero-shot generalization. Specifically, instead of rigging the avatar with shared skinning weights, we jointly infer personalized avatar shape, skinning weights, and pose-dependent deformations, which effectively improves overall geometric fidelity and reduces deformation artifacts. Moreover, to normalize pose variations and resolve coupled ambiguity between canonical shapes and skinning weights, we design a 3D canonicalization process to produce pixel-aligned initial conditions, which helps to reconstruct fine-grained geometric details. We then propose a multi-frame feature aggregation to robustly reduce artifacts introduced in canonicalization and fuse a plausible avatar preserving person-specific identities. Finally, we train the model in an end-to-end framework on a large-scale capture dataset, which contains diverse human subjects paired with high-quality 3D scans. Extensive experiments show that our method generates more authentic reconstruction and animation than state-of-the-arts, and can be directly generalized to inputs from casually taken phone photos. Project page and code is available at https://github.com/rongakowang/FRESA.
Relightable Full-Body Gaussian Codec Avatars
Jan 24, 2025



We propose Relightable Full-Body Gaussian Codec Avatars, a new approach for modeling relightable full-body avatars with fine-grained details including face and hands. The unique challenge for relighting full-body avatars lies in the large deformations caused by body articulation and the resulting impact on appearance caused by light transport. Changes in body pose can dramatically change the orientation of body surfaces with respect to lights, resulting in both local appearance changes due to changes in local light transport functions, as well as non-local changes due to occlusion between body parts. To address this, we decompose the light transport into local and non-local effects. Local appearance changes are modeled using learnable zonal harmonics for diffuse radiance transfer. Unlike spherical harmonics, zonal harmonics are highly efficient to rotate under articulation. This allows us to learn diffuse radiance transfer in a local coordinate frame, which disentangles the local radiance transfer from the articulation of the body. To account for non-local appearance changes, we introduce a shadow network that predicts shadows given precomputed incoming irradiance on a base mesh. This facilitates the learning of non-local shadowing between the body parts. Finally, we use a deferred shading approach to model specular radiance transfer and better capture reflections and highlights such as eye glints. We demonstrate that our approach successfully models both the local and non-local light transport required for relightable full-body avatars, with a superior generalization ability under novel illumination conditions and unseen poses.
Diffusion Shape Prior for Wrinkle-Accurate Cloth Registration
Nov 10, 2023



Registering clothes from 4D scans with vertex-accurate correspondence is challenging, yet important for dynamic appearance modeling and physics parameter estimation from real-world data. However, previous methods either rely on texture information, which is not always reliable, or achieve only coarse-level alignment. In this work, we present a novel approach to enabling accurate surface registration of texture-less clothes with large deformation. Our key idea is to effectively leverage a shape prior learned from pre-captured clothing using diffusion models. We also propose a multi-stage guidance scheme based on learned functional maps, which stabilizes registration for large-scale deformation even when they vary significantly from training data. Using high-fidelity real captured clothes, our experiments show that the proposed approach based on diffusion models generalizes better than surface registration with VAE or PCA-based priors, outperforming both optimization-based and learning-based non-rigid registration methods for both interpolation and extrapolation tests.
Drivable Avatar Clothing: Faithful Full-Body Telepresence with Dynamic Clothing Driven by Sparse RGB-D Input
Oct 11, 2023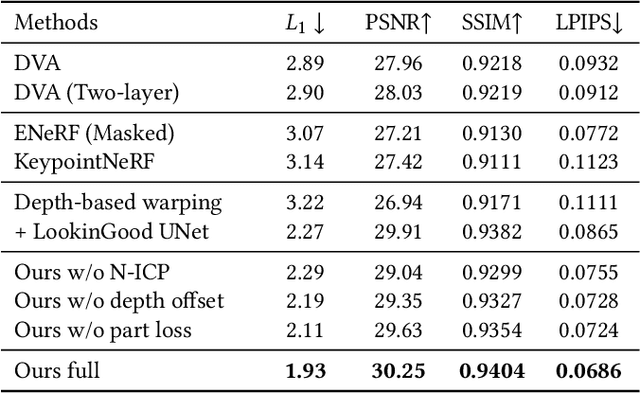
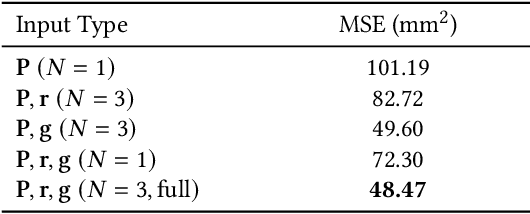

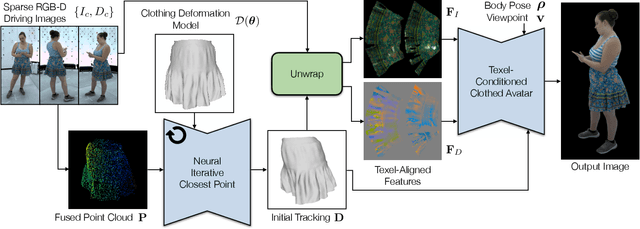
Clothing is an important part of human appearance but challenging to model in photorealistic avatars. In this work we present avatars with dynamically moving loose clothing that can be faithfully driven by sparse RGB-D inputs as well as body and face motion. We propose a Neural Iterative Closest Point (N-ICP) algorithm that can efficiently track the coarse garment shape given sparse depth input. Given the coarse tracking results, the input RGB-D images are then remapped to texel-aligned features, which are fed into the drivable avatar models to faithfully reconstruct appearance details. We evaluate our method against recent image-driven synthesis baselines, and conduct a comprehensive analysis of the N-ICP algorithm. We demonstrate that our method can generalize to a novel testing environment, while preserving the ability to produce high-fidelity and faithful clothing dynamics and appearance.
RelightableHands: Efficient Neural Relighting of Articulated Hand Models
Feb 09, 2023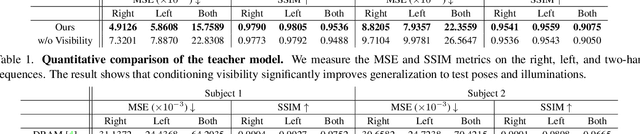
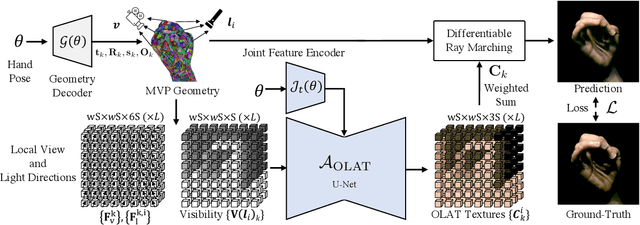

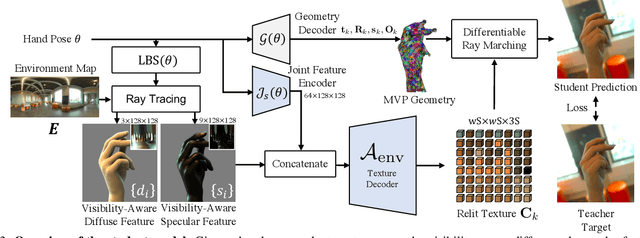
We present the first neural relighting approach for rendering high-fidelity personalized hands that can be animated in real-time under novel illumination. Our approach adopts a teacher-student framework, where the teacher learns appearance under a single point light from images captured in a light-stage, allowing us to synthesize hands in arbitrary illuminations but with heavy compute. Using images rendered by the teacher model as training data, an efficient student model directly predicts appearance under natural illuminations in real-time. To achieve generalization, we condition the student model with physics-inspired illumination features such as visibility, diffuse shading, and specular reflections computed on a coarse proxy geometry, maintaining a small computational overhead. Our key insight is that these features have strong correlation with subsequent global light transport effects, which proves sufficient as conditioning data for the neural relighting network. Moreover, in contrast to bottleneck illumination conditioning, these features are spatially aligned based on underlying geometry, leading to better generalization to unseen illuminations and poses. In our experiments, we demonstrate the efficacy of our illumination feature representations, outperforming baseline approaches. We also show that our approach can photorealistically relight two interacting hands at real-time speeds. https://sh8.io/#/relightable_hands
Drivable Volumetric Avatars using Texel-Aligned Features
Jul 20, 2022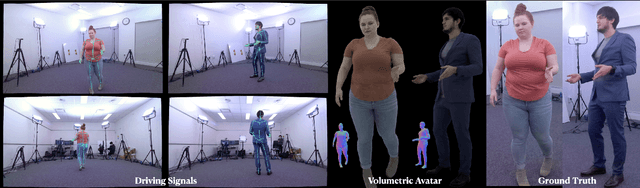
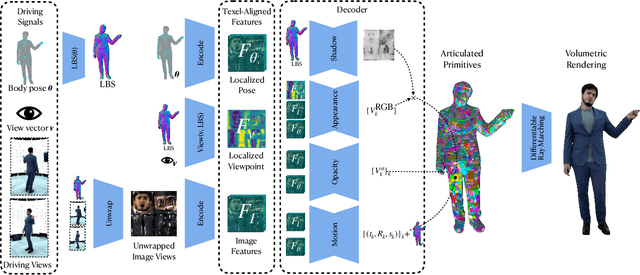
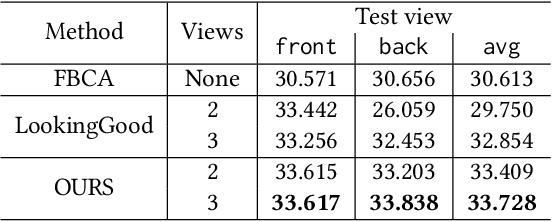
Photorealistic telepresence requires both high-fidelity body modeling and faithful driving to enable dynamically synthesized appearance that is indistinguishable from reality. In this work, we propose an end-to-end framework that addresses two core challenges in modeling and driving full-body avatars of real people. One challenge is driving an avatar while staying faithful to details and dynamics that cannot be captured by a global low-dimensional parameterization such as body pose. Our approach supports driving of clothed avatars with wrinkles and motion that a real driving performer exhibits beyond the training corpus. Unlike existing global state representations or non-parametric screen-space approaches, we introduce texel-aligned features -- a localised representation which can leverage both the structural prior of a skeleton-based parametric model and observed sparse image signals at the same time. Another challenge is modeling a temporally coherent clothed avatar, which typically requires precise surface tracking. To circumvent this, we propose a novel volumetric avatar representation by extending mixtures of volumetric primitives to articulated objects. By explicitly incorporating articulation, our approach naturally generalizes to unseen poses. We also introduce a localized viewpoint conditioning, which leads to a large improvement in generalization of view-dependent appearance. The proposed volumetric representation does not require high-quality mesh tracking as a prerequisite and brings significant quality improvements compared to mesh-based counterparts. In our experiments, we carefully examine our design choices and demonstrate the efficacy of our approach, outperforming the state-of-the-art methods on challenging driving scenarios.
Dressing Avatars: Deep Photorealistic Appearance for Physically Simulated Clothing
Jun 30, 2022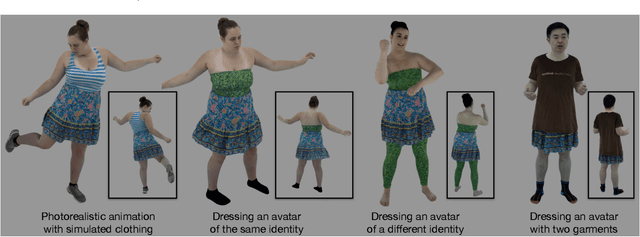
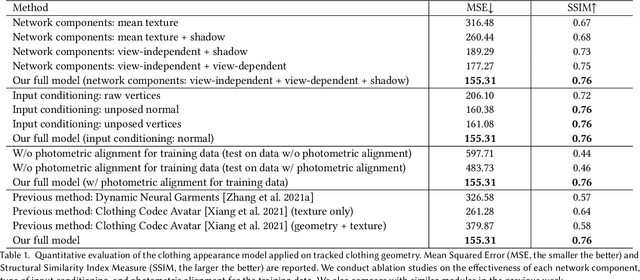
Despite recent progress in developing animatable full-body avatars, realistic modeling of clothing - one of the core aspects of human self-expression - remains an open challenge. State-of-the-art physical simulation methods can generate realistically behaving clothing geometry at interactive rate. Modeling photorealistic appearance, however, usually requires physically-based rendering which is too expensive for interactive applications. On the other hand, data-driven deep appearance models are capable of efficiently producing realistic appearance, but struggle at synthesizing geometry of highly dynamic clothing and handling challenging body-clothing configurations. To this end, we introduce pose-driven avatars with explicit modeling of clothing that exhibit both realistic clothing dynamics and photorealistic appearance learned from real-world data. The key idea is to introduce a neural clothing appearance model that operates on top of explicit geometry: at train time we use high-fidelity tracking, whereas at animation time we rely on physically simulated geometry. Our key contribution is a physically-inspired appearance network, capable of generating photorealistic appearance with view-dependent and dynamic shadowing effects even for unseen body-clothing configurations. We conduct a thorough evaluation of our model and demonstrate diverse animation results on several subjects and different types of clothing. Unlike previous work on photorealistic full-body avatars, our approach can produce much richer dynamics and more realistic deformations even for loose clothing. We also demonstrate that our formulation naturally allows clothing to be used with avatars of different people while staying fully animatable, thus enabling, for the first time, photorealistic avatars with novel clothing.
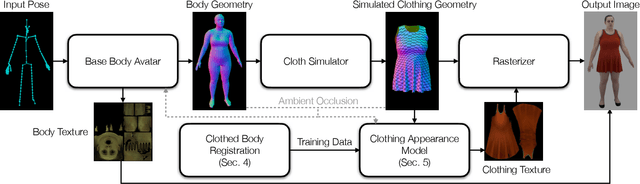
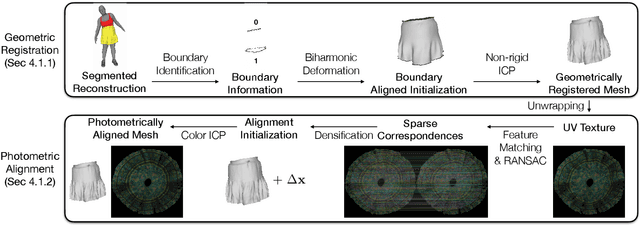
Garment Avatars: Realistic Cloth Driving using Pattern Registration
Jun 07, 2022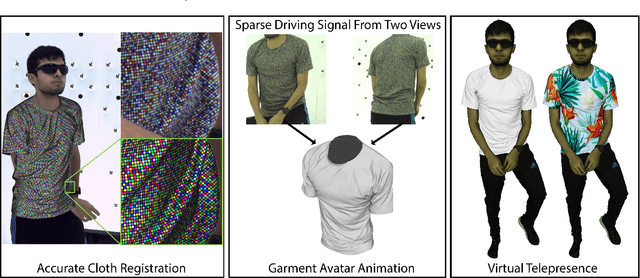

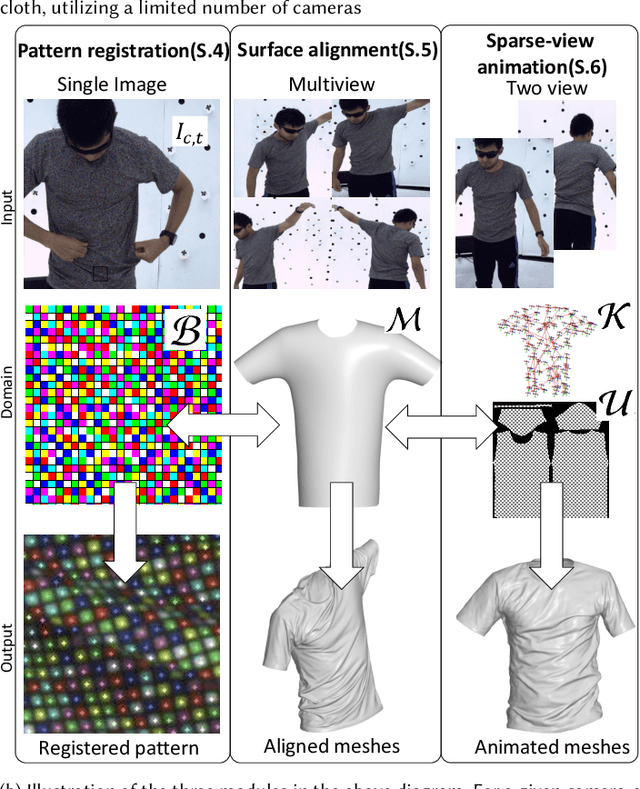

Virtual telepresence is the future of online communication. Clothing is an essential part of a person's identity and self-expression. Yet, ground truth data of registered clothes is currently unavailable in the required resolution and accuracy for training telepresence models for realistic cloth animation. Here, we propose an end-to-end pipeline for building drivable representations for clothing. The core of our approach is a multi-view patterned cloth tracking algorithm capable of capturing deformations with high accuracy. We further rely on the high-quality data produced by our tracking method to build a Garment Avatar: an expressive and fully-drivable geometry model for a piece of clothing. The resulting model can be animated using a sparse set of views and produces highly realistic reconstructions which are faithful to the driving signals. We demonstrate the efficacy of our pipeline on a realistic virtual telepresence application, where a garment is being reconstructed from two views, and a user can pick and swap garment design as they wish. In addition, we show a challenging scenario when driven exclusively with body pose, our drivable garment avatar is capable of producing realistic cloth geometry of significantly higher quality than the state-of-the-art.
Driving-Signal Aware Full-Body Avatars
May 21, 2021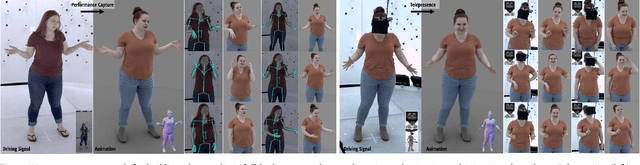
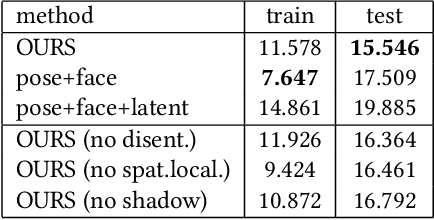
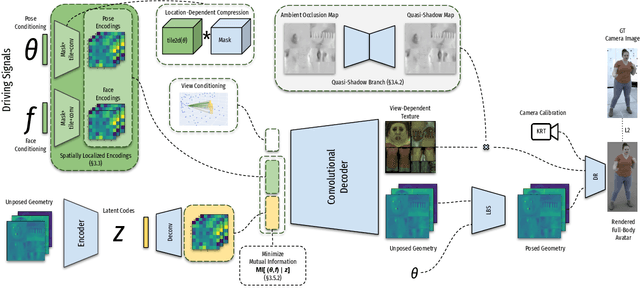
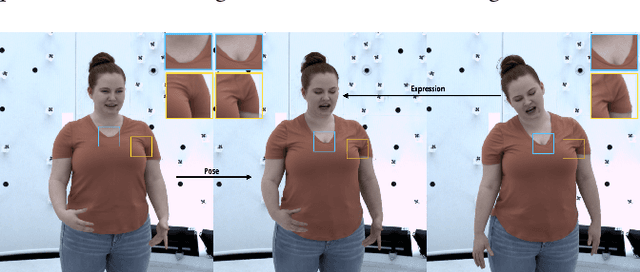
We present a learning-based method for building driving-signal aware full-body avatars. Our model is a conditional variational autoencoder that can be animated with incomplete driving signals, such as human pose and facial keypoints, and produces a high-quality representation of human geometry and view-dependent appearance. The core intuition behind our method is that better drivability and generalization can be achieved by disentangling the driving signals and remaining generative factors, which are not available during animation. To this end, we explicitly account for information deficiency in the driving signal by introducing a latent space that exclusively captures the remaining information, thus enabling the imputation of the missing factors required during full-body animation, while remaining faithful to the driving signal. We also propose a learnable localized compression for the driving signal which promotes better generalization, and helps minimize the influence of global chance-correlations often found in real datasets. For a given driving signal, the resulting variational model produces a compact space of uncertainty for missing factors that allows for an imputation strategy best suited to a particular application. We demonstrate the efficacy of our approach on the challenging problem of full-body animation for virtual telepresence with driving signals acquired from minimal sensors placed in the environment and mounted on a VR-headset.