 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLifting Unlabeled Internet-level Data for 3D Scene Understanding
Apr 02, 2026Annotated 3D scene data is scarce and expensive to acquire, while abundant unlabeled videos are readily available on the internet. In this paper, we demonstrate that carefully designed data engines can leverage web-curated, unlabeled videos to automatically generate training data, to facilitate end-to-end models in 3D scene understanding alongside human-annotated datasets. We identify and analyze bottlenecks in automated data generation, revealing critical factors that determine the efficiency and effectiveness of learning from unlabeled data. To validate our approach across different perception granularities, we evaluate on three tasks spanning low-level perception, i.e., 3D object detection and instance segmentation, to high-evel reasoning, i.e., 3D spatial Visual Question Answering (VQA) and Vision-Lanugage Navigation (VLN). Models trained on our generated data demonstrate strong zero-shot performance and show further improvement after finetuning. This demonstrates the viability of leveraging readily available web data as a path toward more capable scene understanding systems.
Every Step Evolves: Scaling Reinforcement Learning for Trillion-Scale Thinking Model
Oct 21, 2025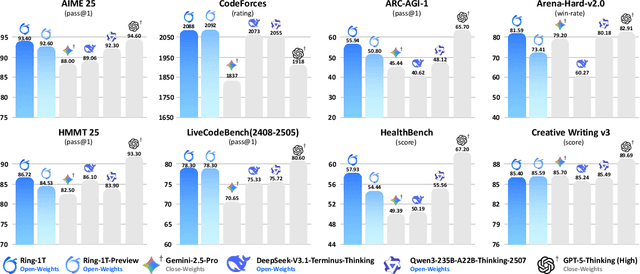
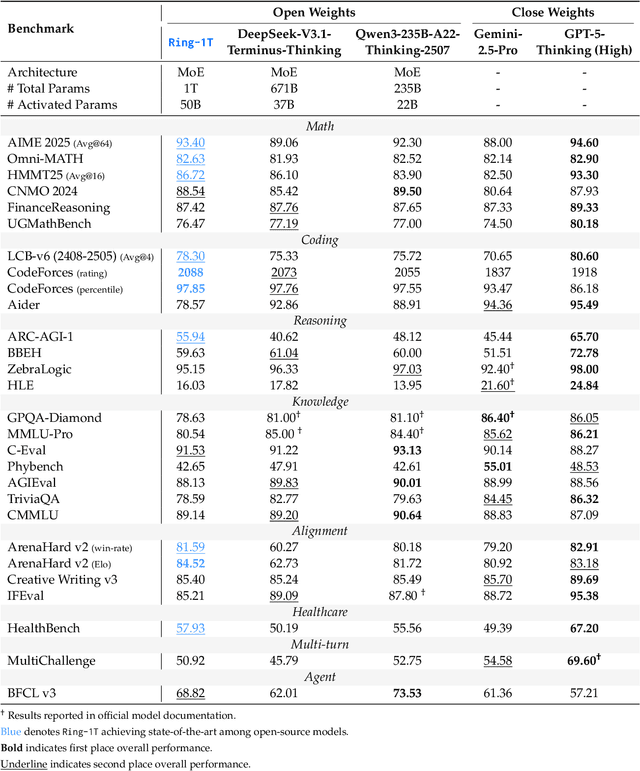
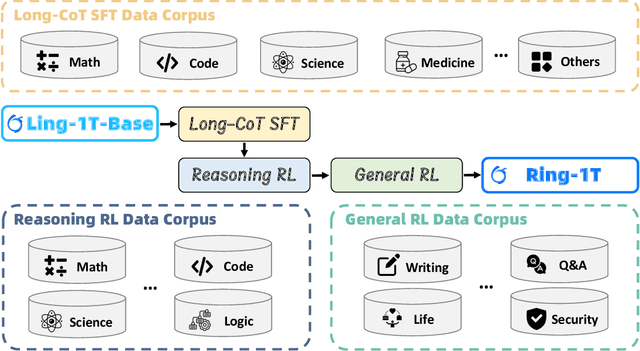
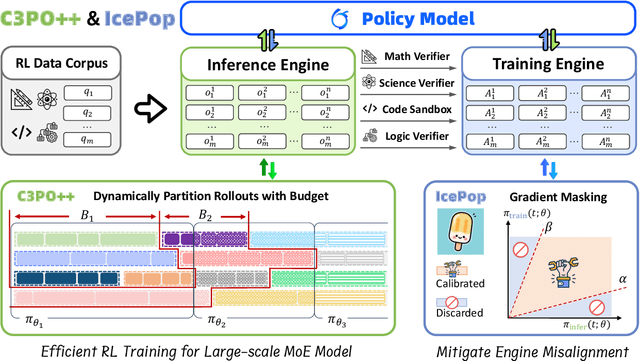
We present Ring-1T, the first open-source, state-of-the-art thinking model with a trillion-scale parameter. It features 1 trillion total parameters and activates approximately 50 billion per token. Training such models at a trillion-parameter scale introduces unprecedented challenges, including train-inference misalignment, inefficiencies in rollout processing, and bottlenecks in the RL system. To address these, we pioneer three interconnected innovations: (1) IcePop stabilizes RL training via token-level discrepancy masking and clipping, resolving instability from training-inference mismatches; (2) C3PO++ improves resource utilization for long rollouts under a token budget by dynamically partitioning them, thereby obtaining high time efficiency; and (3) ASystem, a high-performance RL framework designed to overcome the systemic bottlenecks that impede trillion-parameter model training. Ring-1T delivers breakthrough results across critical benchmarks: 93.4 on AIME-2025, 86.72 on HMMT-2025, 2088 on CodeForces, and 55.94 on ARC-AGI-v1. Notably, it attains a silver medal-level result on the IMO-2025, underscoring its exceptional reasoning capabilities. By releasing the complete 1T parameter MoE model to the community, we provide the research community with direct access to cutting-edge reasoning capabilities. This contribution marks a significant milestone in democratizing large-scale reasoning intelligence and establishes a new baseline for open-source model performance.
HART: Human Aligned Reconstruction Transformer
Sep 30, 2025



We introduce HART, a unified framework for sparse-view human reconstruction. Given a small set of uncalibrated RGB images of a person as input, it outputs a watertight clothed mesh, the aligned SMPL-X body mesh, and a Gaussian-splat representation for photorealistic novel-view rendering. Prior methods for clothed human reconstruction either optimize parametric templates, which overlook loose garments and human-object interactions, or train implicit functions under simplified camera assumptions, limiting applicability in real scenes. In contrast, HART predicts per-pixel 3D point maps, normals, and body correspondences, and employs an occlusion-aware Poisson reconstruction to recover complete geometry, even in self-occluded regions. These predictions also align with a parametric SMPL-X body model, ensuring that reconstructed geometry remains consistent with human structure while capturing loose clothing and interactions. These human-aligned meshes initialize Gaussian splats to further enable sparse-view rendering. While trained on only 2.3K synthetic scans, HART achieves state-of-the-art results: Chamfer Distance improves by 18-23 percent for clothed-mesh reconstruction, PA-V2V drops by 6-27 percent for SMPL-X estimation, LPIPS decreases by 15-27 percent for novel-view synthesis on a wide range of datasets. These results suggest that feed-forward transformers can serve as a scalable model for robust human reconstruction in real-world settings. Code and models will be released.
DNF-Avatar: Distilling Neural Fields for Real-time Animatable Avatar Relighting
Apr 14, 2025Creating relightable and animatable human avatars from monocular videos is a rising research topic with a range of applications, e.g. virtual reality, sports, and video games. Previous works utilize neural fields together with physically based rendering (PBR), to estimate geometry and disentangle appearance properties of human avatars. However, one drawback of these methods is the slow rendering speed due to the expensive Monte Carlo ray tracing. To tackle this problem, we proposed to distill the knowledge from implicit neural fields (teacher) to explicit 2D Gaussian splatting (student) representation to take advantage of the fast rasterization property of Gaussian splatting. To avoid ray-tracing, we employ the split-sum approximation for PBR appearance. We also propose novel part-wise ambient occlusion probes for shadow computation. Shadow prediction is achieved by querying these probes only once per pixel, which paves the way for real-time relighting of avatars. These techniques combined give high-quality relighting results with realistic shadow effects. Our experiments demonstrate that the proposed student model achieves comparable or even better relighting results with our teacher model while being 370 times faster at inference time, achieving a 67 FPS rendering speed.
Relightable Full-Body Gaussian Codec Avatars
Jan 24, 2025



We propose Relightable Full-Body Gaussian Codec Avatars, a new approach for modeling relightable full-body avatars with fine-grained details including face and hands. The unique challenge for relighting full-body avatars lies in the large deformations caused by body articulation and the resulting impact on appearance caused by light transport. Changes in body pose can dramatically change the orientation of body surfaces with respect to lights, resulting in both local appearance changes due to changes in local light transport functions, as well as non-local changes due to occlusion between body parts. To address this, we decompose the light transport into local and non-local effects. Local appearance changes are modeled using learnable zonal harmonics for diffuse radiance transfer. Unlike spherical harmonics, zonal harmonics are highly efficient to rotate under articulation. This allows us to learn diffuse radiance transfer in a local coordinate frame, which disentangles the local radiance transfer from the articulation of the body. To account for non-local appearance changes, we introduce a shadow network that predicts shadows given precomputed incoming irradiance on a base mesh. This facilitates the learning of non-local shadowing between the body parts. Finally, we use a deferred shading approach to model specular radiance transfer and better capture reflections and highlights such as eye glints. We demonstrate that our approach successfully models both the local and non-local light transport required for relightable full-body avatars, with a superior generalization ability under novel illumination conditions and unseen poses.
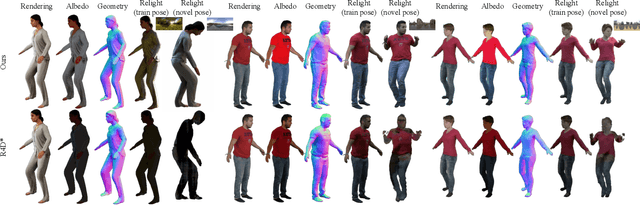
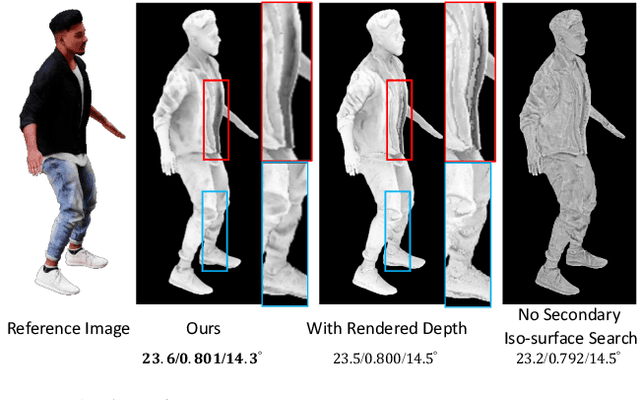
RISE-SDF: a Relightable Information-Shared Signed Distance Field for Glossy Object Inverse Rendering
Sep 30, 2024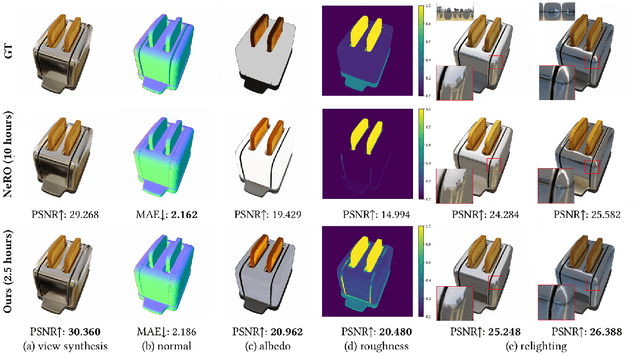
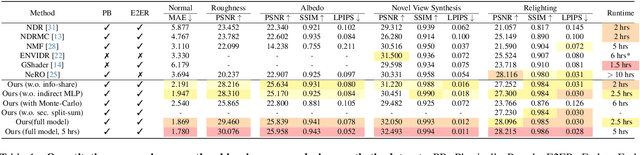
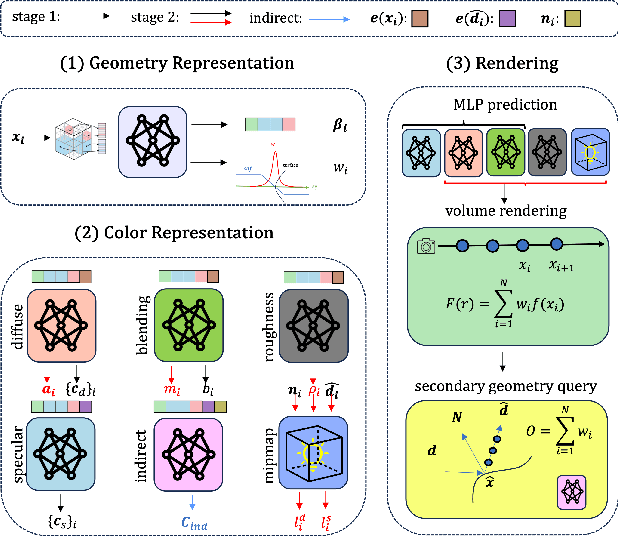

In this paper, we propose a novel end-to-end relightable neural inverse rendering system that achieves high-quality reconstruction of geometry and material properties, thus enabling high-quality relighting. The cornerstone of our method is a two-stage approach for learning a better factorization of scene parameters. In the first stage, we develop a reflection-aware radiance field using a neural signed distance field (SDF) as the geometry representation and deploy an MLP (multilayer perceptron) to estimate indirect illumination. In the second stage, we introduce a novel information-sharing network structure to jointly learn the radiance field and the physically based factorization of the scene. For the physically based factorization, to reduce the noise caused by Monte Carlo sampling, we apply a split-sum approximation with a simplified Disney BRDF and cube mipmap as the environment light representation. In the relighting phase, to enhance the quality of indirect illumination, we propose a second split-sum algorithm to trace secondary rays under the split-sum rendering framework.Furthermore, there is no dataset or protocol available to quantitatively evaluate the inverse rendering performance for glossy objects. To assess the quality of material reconstruction and relighting, we have created a new dataset with ground truth BRDF parameters and relighting results. Our experiments demonstrate that our algorithm achieves state-of-the-art performance in inverse rendering and relighting, with particularly strong results in the reconstruction of highly reflective objects.
Morphable Diffusion: 3D-Consistent Diffusion for Single-image Avatar Creation
Jan 09, 2024



Recent advances in generative diffusion models have enabled the previously unfeasible capability of generating 3D assets from a single input image or a text prompt. In this work, we aim to enhance the quality and functionality of these models for the task of creating controllable, photorealistic human avatars. We achieve this by integrating a 3D morphable model into the state-of-the-art multiview-consistent diffusion approach. We demonstrate that accurate conditioning of a generative pipeline on the articulated 3D model enhances the baseline model performance on the task of novel view synthesis from a single image. More importantly, this integration facilitates a seamless and accurate incorporation of facial expression and body pose control into the generation process. To the best of our knowledge, our proposed framework is the first diffusion model to enable the creation of fully 3D-consistent, animatable, and photorealistic human avatars from a single image of an unseen subject; extensive quantitative and qualitative evaluations demonstrate the advantages of our approach over existing state-of-the-art avatar creation models on both novel view and novel expression synthesis tasks.
3DGS-Avatar: Animatable Avatars via Deformable 3D Gaussian Splatting
Dec 15, 2023We introduce an approach that creates animatable human avatars from monocular videos using 3D Gaussian Splatting (3DGS). Existing methods based on neural radiance fields (NeRFs) achieve high-quality novel-view/novel-pose image synthesis but often require days of training, and are extremely slow at inference time. Recently, the community has explored fast grid structures for efficient training of clothed avatars. Albeit being extremely fast at training, these methods can barely achieve an interactive rendering frame rate with around 15 FPS. In this paper, we use 3D Gaussian Splatting and learn a non-rigid deformation network to reconstruct animatable clothed human avatars that can be trained within 30 minutes and rendered at real-time frame rates (50+ FPS). Given the explicit nature of our representation, we further introduce as-isometric-as-possible regularizations on both the Gaussian mean vectors and the covariance matrices, enhancing the generalization of our model on highly articulated unseen poses. Experimental results show that our method achieves comparable and even better performance compared to state-of-the-art approaches on animatable avatar creation from a monocular input, while being 400x and 250x faster in training and inference, respectively.
IntrinsicAvatar: Physically Based Inverse Rendering of Dynamic Humans from Monocular Videos via Explicit Ray Tracing
Dec 08, 2023
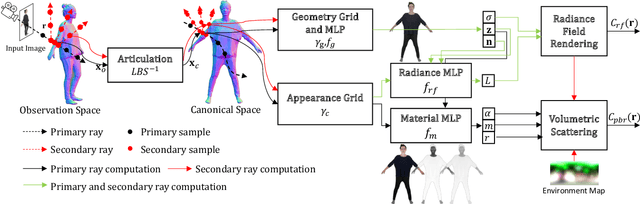
We present IntrinsicAvatar, a novel approach to recovering the intrinsic properties of clothed human avatars including geometry, albedo, material, and environment lighting from only monocular videos. Recent advancements in human-based neural rendering have enabled high-quality geometry and appearance reconstruction of clothed humans from just monocular videos. However, these methods bake intrinsic properties such as albedo, material, and environment lighting into a single entangled neural representation. On the other hand, only a handful of works tackle the problem of estimating geometry and disentangled appearance properties of clothed humans from monocular videos. They usually achieve limited quality and disentanglement due to approximations of secondary shading effects via learned MLPs. In this work, we propose to model secondary shading effects explicitly via Monte-Carlo ray tracing. We model the rendering process of clothed humans as a volumetric scattering process, and combine ray tracing with body articulation. Our approach can recover high-quality geometry, albedo, material, and lighting properties of clothed humans from a single monocular video, without requiring supervised pre-training using ground truth materials. Furthermore, since we explicitly model the volumetric scattering process and ray tracing, our model naturally generalizes to novel poses, enabling animation of the reconstructed avatar in novel lighting conditions.
Synthesizing Diverse Human Motions in 3D Indoor Scenes
May 23, 2023



We present a novel method for populating 3D indoor scenes with virtual humans that can navigate the environment and interact with objects in a realistic manner. Existing approaches rely on high-quality training sequences that capture a diverse range of human motions in 3D scenes. However, such motion data is costly, difficult to obtain and can never cover the full range of plausible human-scene interactions in complex indoor environments. To address these challenges, we propose a reinforcement learning-based approach to learn policy networks that predict latent variables of a powerful generative motion model that is trained on a large-scale motion capture dataset (AMASS). For navigating in a 3D environment, we propose a scene-aware policy training scheme with a novel collision avoidance reward function. Combined with the powerful generative motion model, we can synthesize highly diverse human motions navigating 3D indoor scenes, meanwhile effectively avoiding obstacles. For detailed human-object interactions, we carefully curate interaction-aware reward functions by leveraging a marker-based body representation and the signed distance field (SDF) representation of the 3D scene. With a number of important training design schemes, our method can synthesize realistic and diverse human-object interactions (e.g.,~sitting on a chair and then getting up) even for out-of-distribution test scenarios with different object shapes, orientations, starting body positions, and poses. Experimental results demonstrate that our approach outperforms state-of-the-art human-scene interaction synthesis frameworks in terms of both motion naturalness and diversity. Video results are available on the project page: https://zkf1997.github.io/DIMOS.