 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI GPT-5 System Card
Dec 19, 2025This is the system card published alongside the OpenAI GPT-5 launch, August 2025. GPT-5 is a unified system with a smart and fast model that answers most questions, a deeper reasoning model for harder problems, and a real-time router that quickly decides which model to use based on conversation type, complexity, tool needs, and explicit intent (for example, if you say 'think hard about this' in the prompt). The router is continuously trained on real signals, including when users switch models, preference rates for responses, and measured correctness, improving over time. Once usage limits are reached, a mini version of each model handles remaining queries. This system card focuses primarily on gpt-5-thinking and gpt-5-main, while evaluations for other models are available in the appendix. The GPT-5 system not only outperforms previous models on benchmarks and answers questions more quickly, but -- more importantly -- is more useful for real-world queries. We've made significant advances in reducing hallucinations, improving instruction following, and minimizing sycophancy, and have leveled up GPT-5's performance in three of ChatGPT's most common uses: writing, coding, and health. All of the GPT-5 models additionally feature safe-completions, our latest approach to safety training to prevent disallowed content. Similarly to ChatGPT agent, we have decided to treat gpt-5-thinking as High capability in the Biological and Chemical domain under our Preparedness Framework, activating the associated safeguards. While we do not have definitive evidence that this model could meaningfully help a novice to create severe biological harm -- our defined threshold for High capability -- we have chosen to take a precautionary approach.
GDPval: Evaluating AI Model Performance on Real-World Economically Valuable Tasks
Oct 05, 2025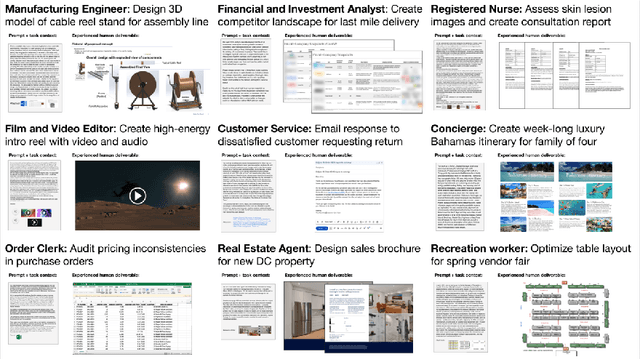



We introduce GDPval, a benchmark evaluating AI model capabilities on real-world economically valuable tasks. GDPval covers the majority of U.S. Bureau of Labor Statistics Work Activities for 44 occupations across the top 9 sectors contributing to U.S. GDP (Gross Domestic Product). Tasks are constructed from the representative work of industry professionals with an average of 14 years of experience. We find that frontier model performance on GDPval is improving roughly linearly over time, and that the current best frontier models are approaching industry experts in deliverable quality. We analyze the potential for frontier models, when paired with human oversight, to perform GDPval tasks cheaper and faster than unaided experts. We also demonstrate that increased reasoning effort, increased task context, and increased scaffolding improves model performance on GDPval. Finally, we open-source a gold subset of 220 tasks and provide a public automated grading service at evals.openai.com to facilitate future research in understanding real-world model capabilities.
Persona Features Control Emergent Misalignment
Jun 24, 2025



Understanding how language models generalize behaviors from their training to a broader deployment distribution is an important problem in AI safety. Betley et al. discovered that fine-tuning GPT-4o on intentionally insecure code causes "emergent misalignment," where models give stereotypically malicious responses to unrelated prompts. We extend this work, demonstrating emergent misalignment across diverse conditions, including reinforcement learning on reasoning models, fine-tuning on various synthetic datasets, and in models without safety training. To investigate the mechanisms behind this generalized misalignment, we apply a "model diffing" approach using sparse autoencoders to compare internal model representations before and after fine-tuning. This approach reveals several "misaligned persona" features in activation space, including a toxic persona feature which most strongly controls emergent misalignment and can be used to predict whether a model will exhibit such behavior. Additionally, we investigate mitigation strategies, discovering that fine-tuning an emergently misaligned model on just a few hundred benign samples efficiently restores alignment.
OpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
GPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
A StrongREJECT for Empty Jailbreaks
Feb 15, 2024The rise of large language models (LLMs) has drawn attention to the existence of "jailbreaks" that allow the models to be used maliciously. However, there is no standard benchmark for measuring the severity of a jailbreak, leaving authors of jailbreak papers to create their own. We show that these benchmarks often include vague or unanswerable questions and use grading criteria that are biased towards overestimating the misuse potential of low-quality model responses. Some jailbreak techniques make the problem worse by decreasing the quality of model responses even on benign questions: we show that several jailbreaking techniques substantially reduce the zero-shot performance of GPT-4 on MMLU. Jailbreaks can also make it harder to elicit harmful responses from an "uncensored" open-source model. We present a new benchmark, StrongREJECT, which better discriminates between effective and ineffective jailbreaks by using a higher-quality question set and a more accurate response grading algorithm. We show that our new grading scheme better accords with human judgment of response quality and overall jailbreak effectiveness, especially on the sort of low-quality responses that contribute the most to over-estimation of jailbreak performance on existing benchmarks. We release our code and data at https://github.com/alexandrasouly/strongreject.
Tensor Trust: Interpretable Prompt Injection Attacks from an Online Game
Nov 02, 2023While Large Language Models (LLMs) are increasingly being used in real-world applications, they remain vulnerable to prompt injection attacks: malicious third party prompts that subvert the intent of the system designer. To help researchers study this problem, we present a dataset of over 126,000 prompt injection attacks and 46,000 prompt-based "defenses" against prompt injection, all created by players of an online game called Tensor Trust. To the best of our knowledge, this is currently the largest dataset of human-generated adversarial examples for instruction-following LLMs. The attacks in our dataset have a lot of easily interpretable stucture, and shed light on the weaknesses of LLMs. We also use the dataset to create a benchmark for resistance to two types of prompt injection, which we refer to as prompt extraction and prompt hijacking. Our benchmark results show that many models are vulnerable to the attack strategies in the Tensor Trust dataset. Furthermore, we show that some attack strategies from the dataset generalize to deployed LLM-based applications, even though they have a very different set of constraints to the game. We release all data and source code at https://tensortrust.ai/paper
Learning to Model the World with Language
Jul 31, 2023



To interact with humans in the world, agents need to understand the diverse types of language that people use, relate them to the visual world, and act based on them. While current agents learn to execute simple language instructions from task rewards, we aim to build agents that leverage diverse language that conveys general knowledge, describes the state of the world, provides interactive feedback, and more. Our key idea is that language helps agents predict the future: what will be observed, how the world will behave, and which situations will be rewarded. This perspective unifies language understanding with future prediction as a powerful self-supervised learning objective. We present Dynalang, an agent that learns a multimodal world model that predicts future text and image representations and learns to act from imagined model rollouts. Unlike traditional agents that use language only to predict actions, Dynalang acquires rich language understanding by using past language also to predict future language, video, and rewards. In addition to learning from online interaction in an environment, Dynalang can be pretrained on datasets of text, video, or both without actions or rewards. From using language hints in grid worlds to navigating photorealistic scans of homes, Dynalang utilizes diverse types of language to improve task performance, including environment descriptions, game rules, and instructions.
DPOK: Reinforcement Learning for Fine-tuning Text-to-Image Diffusion Models
May 25, 2023



Learning from human feedback has been shown to improve text-to-image models. These techniques first learn a reward function that captures what humans care about in the task and then improve the models based on the learned reward function. Even though relatively simple approaches (e.g., rejection sampling based on reward scores) have been investigated, fine-tuning text-to-image models with the reward function remains challenging. In this work, we propose using online reinforcement learning (RL) to fine-tune text-to-image models. We focus on diffusion models, defining the fine-tuning task as an RL problem, and updating the pre-trained text-to-image diffusion models using policy gradient to maximize the feedback-trained reward. Our approach, coined DPOK, integrates policy optimization with KL regularization. We conduct an analysis of KL regularization for both RL fine-tuning and supervised fine-tuning. In our experiments, we show that DPOK is generally superior to supervised fine-tuning with respect to both image-text alignment and image quality.
Aligning Text-to-Image Models using Human Feedback
Feb 23, 2023



Deep generative models have shown impressive results in text-to-image synthesis. However, current text-to-image models often generate images that are inadequately aligned with text prompts. We propose a fine-tuning method for aligning such models using human feedback, comprising three stages. First, we collect human feedback assessing model output alignment from a set of diverse text prompts. We then use the human-labeled image-text dataset to train a reward function that predicts human feedback. Lastly, the text-to-image model is fine-tuned by maximizing reward-weighted likelihood to improve image-text alignment. Our method generates objects with specified colors, counts and backgrounds more accurately than the pre-trained model. We also analyze several design choices and find that careful investigations on such design choices are important in balancing the alignment-fidelity tradeoffs. Our results demonstrate the potential for learning from human feedback to significantly improve text-to-image models.