 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplaining Reinforcement Learning Policies through Counterfactual Trajectories
Jan 29, 2022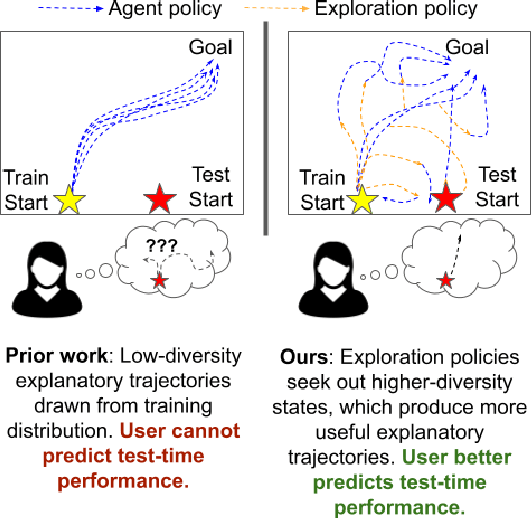
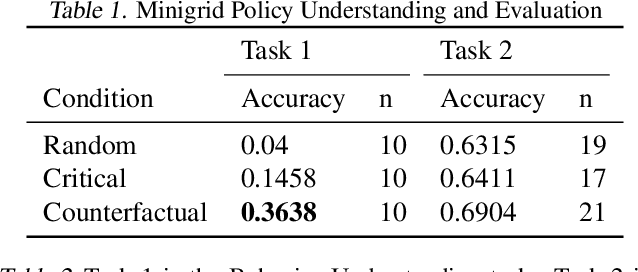
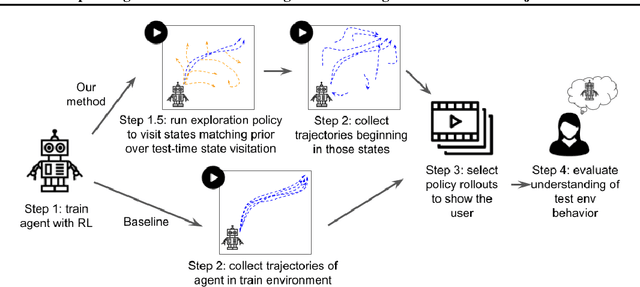
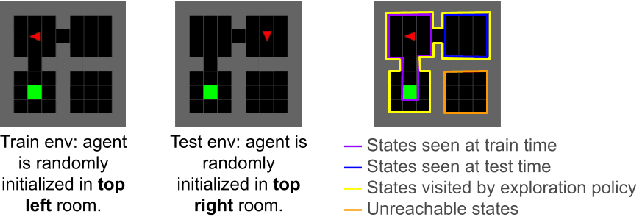
In order for humans to confidently decide where to employ RL agents for real-world tasks, a human developer must validate that the agent will perform well at test-time. Some policy interpretability methods facilitate this by capturing the policy's decision making in a set of agent rollouts. However, even the most informative trajectories of training time behavior may give little insight into the agent's behavior out of distribution. In contrast, our method conveys how the agent performs under distribution shifts by showing the agent's behavior across a wider trajectory distribution. We generate these trajectories by guiding the agent to more diverse unseen states and showing the agent's behavior there. In a user study, we demonstrate that our method enables users to score better than baseline methods on one of two agent validation tasks.
Program Language Translation Using a Grammar-Driven Tree-to-Tree Model
Jul 04, 2018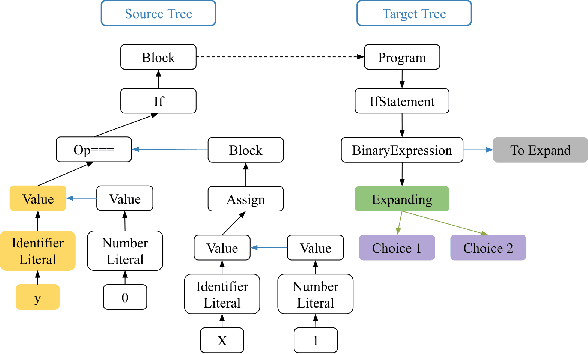
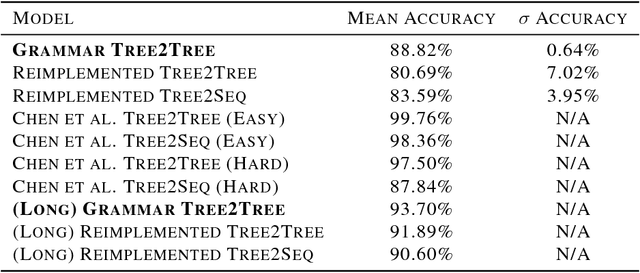
The task of translating between programming languages differs from the challenge of translating natural languages in that programming languages are designed with a far more rigid set of structural and grammatical rules. Previous work has used a tree-to-tree encoder/decoder model to take advantage of the inherent tree structure of programs during translation. Neural decoders, however, by default do not exploit known grammar rules of the target language. In this paper, we describe a tree decoder that leverages knowledge of a language's grammar rules to exclusively generate syntactically correct programs. We find that this grammar-based tree-to-tree model outperforms the state of the art tree-to-tree model in translating between two programming languages on a previously used synthetic task.