 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025



We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.
InternVL3: Exploring Advanced Training and Test-Time Recipes for Open-Source Multimodal Models
Apr 15, 2025We introduce InternVL3, a significant advancement in the InternVL series featuring a native multimodal pre-training paradigm. Rather than adapting a text-only large language model (LLM) into a multimodal large language model (MLLM) that supports visual inputs, InternVL3 jointly acquires multimodal and linguistic capabilities from both diverse multimodal data and pure-text corpora during a single pre-training stage. This unified training paradigm effectively addresses the complexities and alignment challenges commonly encountered in conventional post-hoc training pipelines for MLLMs. To further improve performance and scalability, InternVL3 incorporates variable visual position encoding (V2PE) to support extended multimodal contexts, employs advanced post-training techniques such as supervised fine-tuning (SFT) and mixed preference optimization (MPO), and adopts test-time scaling strategies alongside an optimized training infrastructure. Extensive empirical evaluations demonstrate that InternVL3 delivers superior performance across a wide range of multi-modal tasks. In particular, InternVL3-78B achieves a score of 72.2 on the MMMU benchmark, setting a new state-of-the-art among open-source MLLMs. Its capabilities remain highly competitive with leading proprietary models, including ChatGPT-4o, Claude 3.5 Sonnet, and Gemini 2.5 Pro, while also maintaining strong pure-language proficiency. In pursuit of open-science principles, we will publicly release both the training data and model weights to foster further research and development in next-generation MLLMs.
InternVideo2.5: Empowering Video MLLMs with Long and Rich Context Modeling
Jan 21, 2025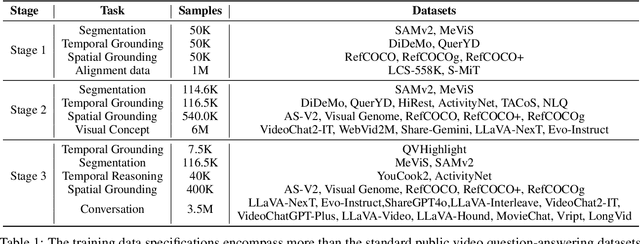
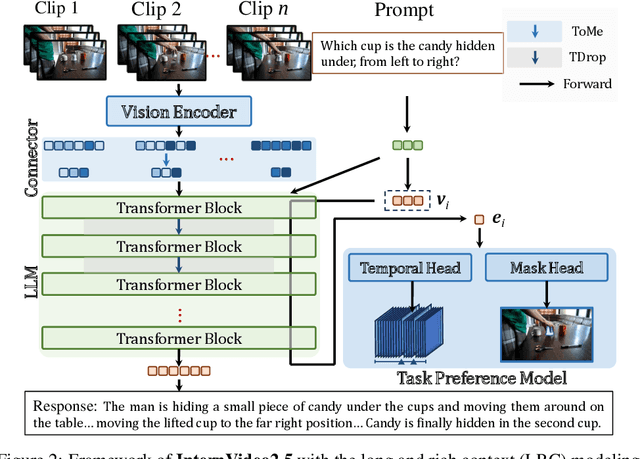
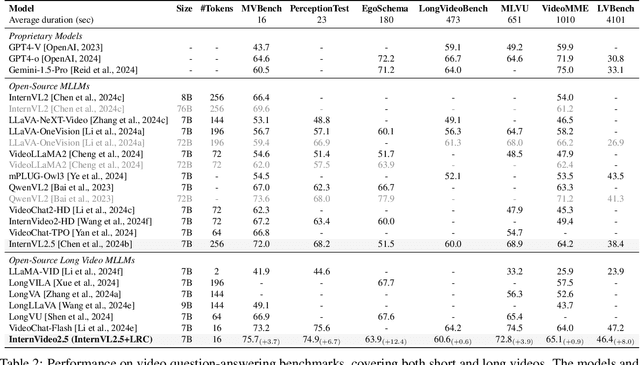
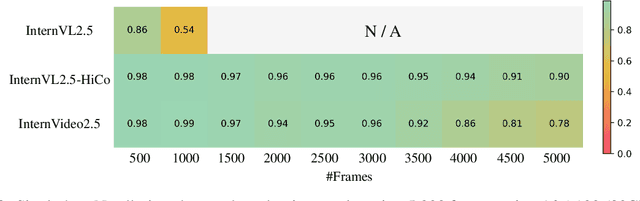
This paper aims to improve the performance of video multimodal large language models (MLLM) via long and rich context (LRC) modeling. As a result, we develop a new version of InternVideo2.5 with a focus on enhancing the original MLLMs' ability to perceive fine-grained details and capture long-form temporal structure in videos. Specifically, our approach incorporates dense vision task annotations into MLLMs using direct preference optimization and develops compact spatiotemporal representations through adaptive hierarchical token compression. Experimental results demonstrate this unique design of LRC greatly improves the results of video MLLM in mainstream video understanding benchmarks (short & long), enabling the MLLM to memorize significantly longer video inputs (at least 6x longer than the original), and master specialized vision capabilities like object tracking and segmentation. Our work highlights the importance of multimodal context richness (length and fineness) in empowering MLLM's innate abilites (focus and memory), providing new insights for future research on video MLLM. Code and models are available at https://github.com/OpenGVLab/InternVideo/tree/main/InternVideo2.5
Expanding Performance Boundaries of Open-Source Multimodal Models with Model, Data, and Test-Time Scaling
Dec 06, 2024



We introduce InternVL 2.5, an advanced multimodal large language model (MLLM) series that builds upon InternVL 2.0, maintaining its core model architecture while introducing significant enhancements in training and testing strategies as well as data quality. In this work, we delve into the relationship between model scaling and performance, systematically exploring the performance trends in vision encoders, language models, dataset sizes, and test-time configurations. Through extensive evaluations on a wide range of benchmarks, including multi-discipline reasoning, document understanding, multi-image / video understanding, real-world comprehension, multimodal hallucination detection, visual grounding, multilingual capabilities, and pure language processing, InternVL 2.5 exhibits competitive performance, rivaling leading commercial models such as GPT-4o and Claude-3.5-Sonnet. Notably, our model is the first open-source MLLMs to surpass 70% on the MMMU benchmark, achieving a 3.7-point improvement through Chain-of-Thought (CoT) reasoning and showcasing strong potential for test-time scaling. We hope this model contributes to the open-source community by setting new standards for developing and applying multimodal AI systems. HuggingFace demo see https://huggingface.co/spaces/OpenGVLab/InternVL
ZOPP: A Framework of Zero-shot Offboard Panoptic Perception for Autonomous Driving
Nov 08, 2024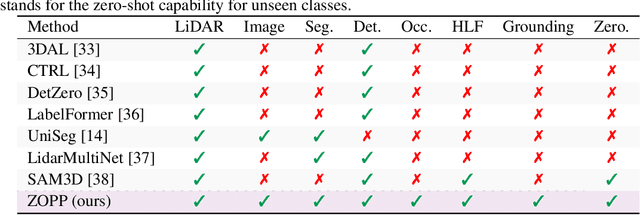
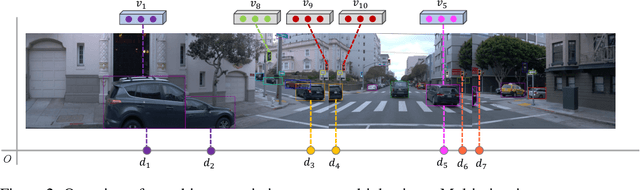


Offboard perception aims to automatically generate high-quality 3D labels for autonomous driving (AD) scenes. Existing offboard methods focus on 3D object detection with closed-set taxonomy and fail to match human-level recognition capability on the rapidly evolving perception tasks. Due to heavy reliance on human labels and the prevalence of data imbalance and sparsity, a unified framework for offboard auto-labeling various elements in AD scenes that meets the distinct needs of perception tasks is not being fully explored. In this paper, we propose a novel multi-modal Zero-shot Offboard Panoptic Perception (ZOPP) framework for autonomous driving scenes. ZOPP integrates the powerful zero-shot recognition capabilities of vision foundation models and 3D representations derived from point clouds. To the best of our knowledge, ZOPP represents a pioneering effort in the domain of multi-modal panoptic perception and auto labeling for autonomous driving scenes. We conduct comprehensive empirical studies and evaluations on Waymo open dataset to validate the proposed ZOPP on various perception tasks. To further explore the usability and extensibility of our proposed ZOPP, we also conduct experiments in downstream applications. The results further demonstrate the great potential of our ZOPP for real-world scenarios.
DreamForge: Motion-Aware Autoregressive Video Generation for Multi-View Driving Scenes
Sep 06, 2024



Recent advances in diffusion models have significantly enhanced the cotrollable generation of streetscapes for and facilitated downstream perception and planning tasks. However, challenges such as maintaining temporal coherence, generating long videos, and accurately modeling driving scenes persist. Accordingly, we propose DreamForge, an advanced diffusion-based autoregressive video generation model designed for the long-term generation of 3D-controllable and extensible video. In terms of controllability, our DreamForge supports flexible conditions such as text descriptions, camera poses, 3D bounding boxes, and road layouts, while also providing perspective guidance to produce driving scenes that are both geometrically and contextually accurate. For consistency, we ensure inter-view consistency through cross-view attention and temporal coherence via an autoregressive architecture enhanced with motion cues. Codes will be available at https://github.com/PJLab-ADG/DriveArena.
DriveArena: A Closed-loop Generative Simulation Platform for Autonomous Driving
Aug 01, 2024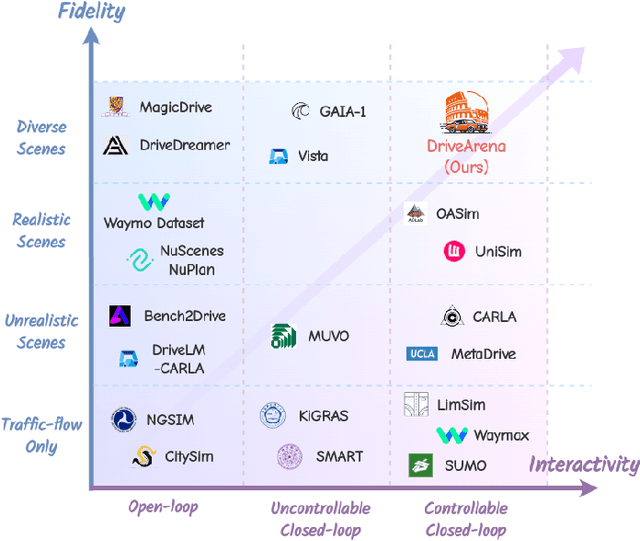

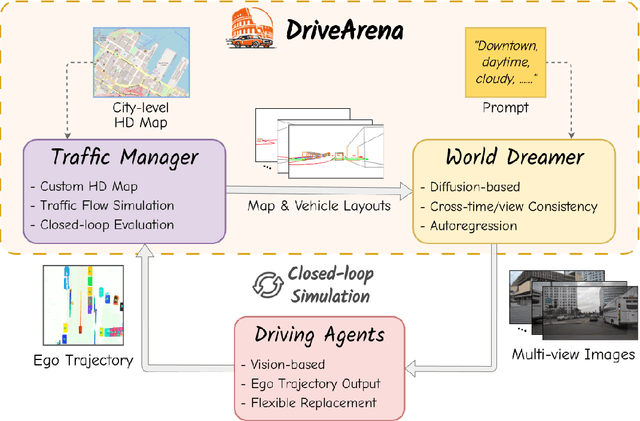

This paper presented DriveArena, the first high-fidelity closed-loop simulation system designed for driving agents navigating in real scenarios. DriveArena features a flexible, modular architecture, allowing for the seamless interchange of its core components: Traffic Manager, a traffic simulator capable of generating realistic traffic flow on any worldwide street map, and World Dreamer, a high-fidelity conditional generative model with infinite autoregression. This powerful synergy empowers any driving agent capable of processing real-world images to navigate in DriveArena's simulated environment. The agent perceives its surroundings through images generated by World Dreamer and output trajectories. These trajectories are fed into Traffic Manager, achieving realistic interactions with other vehicles and producing a new scene layout. Finally, the latest scene layout is relayed back into World Dreamer, perpetuating the simulation cycle. This iterative process fosters closed-loop exploration within a highly realistic environment, providing a valuable platform for developing and evaluating driving agents across diverse and challenging scenarios. DriveArena signifies a substantial leap forward in leveraging generative image data for the driving simulation platform, opening insights for closed-loop autonomous driving. Code will be available soon on GitHub: https://github.com/PJLab-ADG/DriveArena
DocGenome: An Open Large-scale Scientific Document Benchmark for Training and Testing Multi-modal Large Language Models
Jun 17, 2024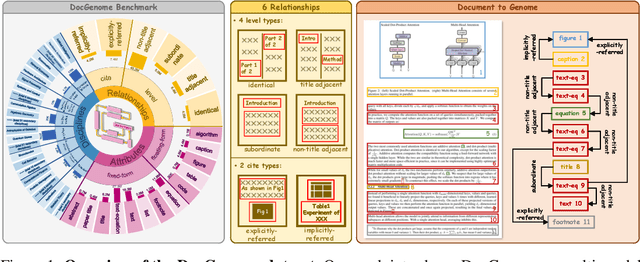
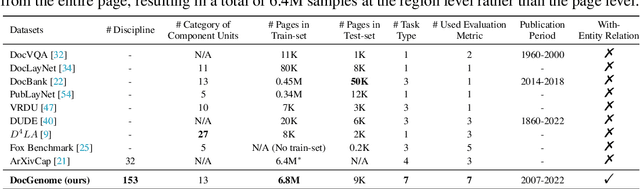
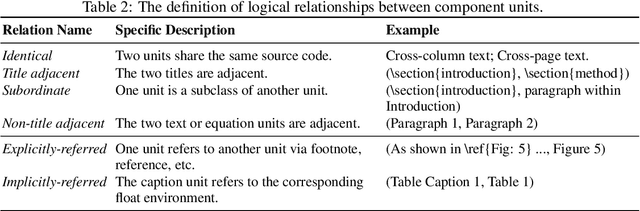
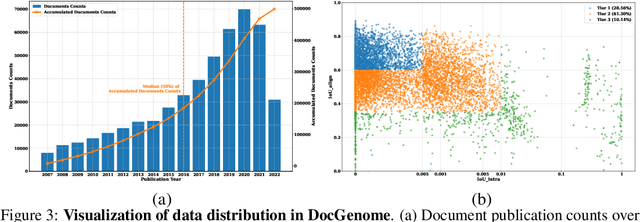
Scientific documents record research findings and valuable human knowledge, comprising a vast corpus of high-quality data. Leveraging multi-modality data extracted from these documents and assessing large models' abilities to handle scientific document-oriented tasks is therefore meaningful. Despite promising advancements, large models still perform poorly on multi-page scientific document extraction and understanding tasks, and their capacity to process within-document data formats such as charts and equations remains under-explored. To address these issues, we present DocGenome, a structured document benchmark constructed by annotating 500K scientific documents from 153 disciplines in the arXiv open-access community, using our custom auto-labeling pipeline. DocGenome features four key characteristics: 1) Completeness: It is the first dataset to structure data from all modalities including 13 layout attributes along with their LaTeX source codes. 2) Logicality: It provides 6 logical relationships between different entities within each scientific document. 3) Diversity: It covers various document-oriented tasks, including document classification, visual grounding, document layout detection, document transformation, open-ended single-page QA and multi-page QA. 4) Correctness: It undergoes rigorous quality control checks conducted by a specialized team. We conduct extensive experiments to demonstrate the advantages of DocGenome and objectively evaluate the performance of large models on our benchmark.
OmniCorpus: A Unified Multimodal Corpus of 10 Billion-Level Images Interleaved with Text
Jun 13, 2024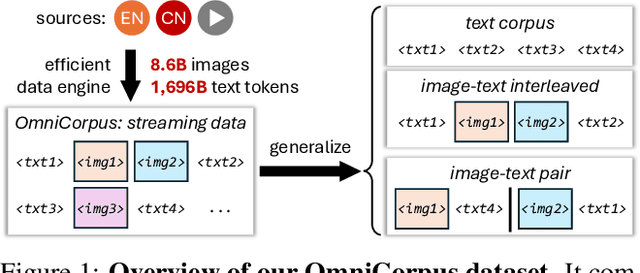
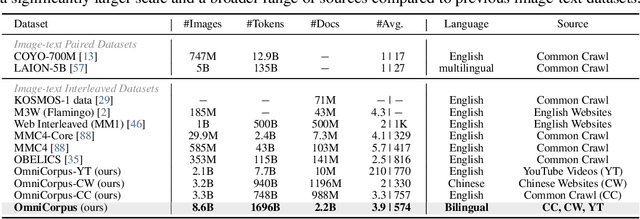
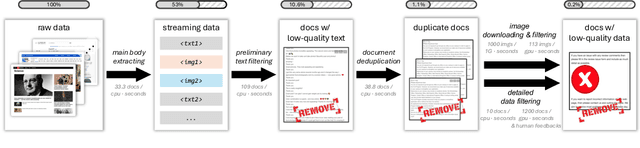
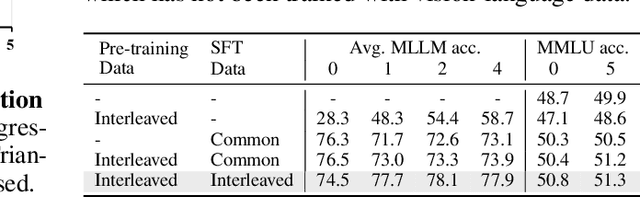
Image-text interleaved data, consisting of multiple images and texts arranged in a natural document format, aligns with the presentation paradigm of internet data and closely resembles human reading habits. Recent studies have shown that such data aids multimodal in-context learning and maintains the capabilities of large language models during multimodal fine-tuning. However, the limited scale and diversity of current image-text interleaved data restrict the development of multimodal large language models. In this paper, we introduce OmniCorpus, a 10 billion-scale image-text interleaved dataset. Using an efficient data engine, we filter and extract large-scale high-quality documents, which contain 8.6 billion images and 1,696 billion text tokens. Compared to counterparts (e.g., MMC4, OBELICS), our dataset 1) has 15 times larger scales while maintaining good data quality; 2) features more diverse sources, including both English and non-English websites as well as video-centric websites; 3) is more flexible, easily degradable from an image-text interleaved format to pure text corpus and image-text pairs. Through comprehensive analysis and experiments, we validate the quality, usability, and effectiveness of the proposed dataset. We hope this could provide a solid data foundation for future multimodal model research. Code and data are released at https://github.com/OpenGVLab/OmniCorpus.
OmniCorpus: An Unified Multimodal Corpus of 10 Billion-Level Images Interleaved with Text
Jun 12, 2024Image-text interleaved data, consisting of multiple images and texts arranged in a natural document format, aligns with the presentation paradigm of internet data and closely resembles human reading habits. Recent studies have shown that such data aids multimodal in-context learning and maintains the capabilities of large language models during multimodal fine-tuning. However, the limited scale and diversity of current image-text interleaved data restrict the development of multimodal large language models. In this paper, we introduce OmniCorpus, a 10 billion-scale image-text interleaved dataset. Using an efficient data engine, we filter and extract large-scale high-quality documents, which contain 8.6 billion images and 1,696 billion text tokens. Compared to counterparts (e.g., MMC4, OBELICS), our dataset 1) has 15 times larger scales while maintaining good data quality; 2) features more diverse sources, including both English and non-English websites as well as video-centric websites; 3) is more flexible, easily degradable from an image-text interleaved format to pure text corpus and image-text pairs. Through comprehensive analysis and experiments, we validate the quality, usability, and effectiveness of the proposed dataset. We hope this could provide a solid data foundation for future multimodal model research. Code and data are released at https://github.com/OpenGVLab/OmniCorpus.