 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeanRAG: Knowledge-Graph-Based Generation with Semantic Aggregation and Hierarchical Retrieval
Aug 14, 2025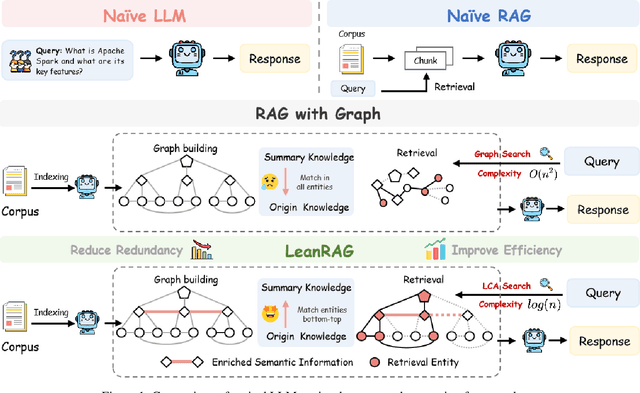
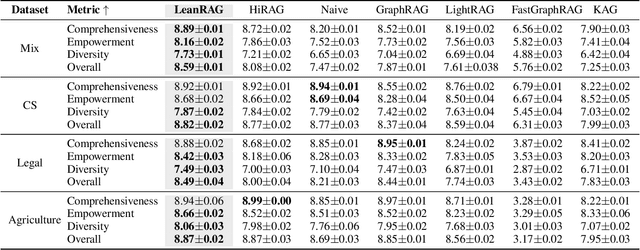
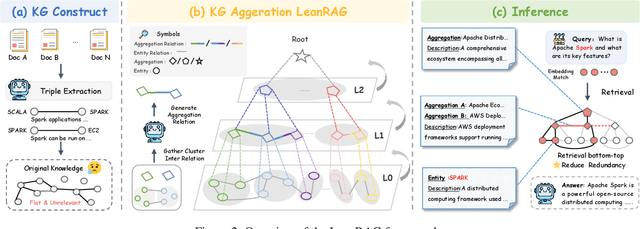

Retrieval-Augmented Generation (RAG) plays a crucial role in grounding Large Language Models by leveraging external knowledge, whereas the effectiveness is often compromised by the retrieval of contextually flawed or incomplete information. To address this, knowledge graph-based RAG methods have evolved towards hierarchical structures, organizing knowledge into multi-level summaries. However, these approaches still suffer from two critical, unaddressed challenges: high-level conceptual summaries exist as disconnected ``semantic islands'', lacking the explicit relations needed for cross-community reasoning; and the retrieval process itself remains structurally unaware, often degenerating into an inefficient flat search that fails to exploit the graph's rich topology. To overcome these limitations, we introduce LeanRAG, a framework that features a deeply collaborative design combining knowledge aggregation and retrieval strategies. LeanRAG first employs a novel semantic aggregation algorithm that forms entity clusters and constructs new explicit relations among aggregation-level summaries, creating a fully navigable semantic network. Then, a bottom-up, structure-guided retrieval strategy anchors queries to the most relevant fine-grained entities and then systematically traverses the graph's semantic pathways to gather concise yet contextually comprehensive evidence sets. The LeanRAG can mitigate the substantial overhead associated with path retrieval on graphs and minimizes redundant information retrieval. Extensive experiments on four challenging QA benchmarks with different domains demonstrate that LeanRAG significantly outperforming existing methods in response quality while reducing 46\% retrieval redundancy. Code is available at: https://github.com/RaZzzyz/LeanRAG
GDI-Bench: A Benchmark for General Document Intelligence with Vision and Reasoning Decoupling
Apr 30, 2025The rapid advancement of multimodal large language models (MLLMs) has profoundly impacted the document domain, creating a wide array of application scenarios. This progress highlights the need for a comprehensive benchmark to evaluate these models' capabilities across various document-specific tasks. However, existing benchmarks often fail to locate specific model weaknesses or guide systematic improvements. To bridge this gap, we introduce a General Document Intelligence Benchmark (GDI-Bench), featuring 1.9k images across 9 key scenarios and 19 document-specific tasks. By decoupling visual complexity and reasoning complexity, the GDI-Bench structures graded tasks that allow performance assessment by difficulty, aiding in model weakness identification and optimization guidance. We evaluate the GDI-Bench on various open-source and closed-source models, conducting decoupled analyses in the visual and reasoning domains. For instance, the GPT-4o model excels in reasoning tasks but exhibits limitations in visual capabilities. To address the diverse tasks and domains in the GDI-Bench, we propose a GDI Model that mitigates the issue of catastrophic forgetting during the supervised fine-tuning (SFT) process through a intelligence-preserving training strategy. Our model achieves state-of-the-art performance on previous benchmarks and the GDI-Bench. Both our benchmark and model will be open source.
RAKG:Document-level Retrieval Augmented Knowledge Graph Construction
Apr 14, 2025With the rise of knowledge graph based retrieval-augmented generation (RAG) techniques such as GraphRAG and Pike-RAG, the role of knowledge graphs in enhancing the reasoning capabilities of large language models (LLMs) has become increasingly prominent. However, traditional Knowledge Graph Construction (KGC) methods face challenges like complex entity disambiguation, rigid schema definition, and insufficient cross-document knowledge integration. This paper focuses on the task of automatic document-level knowledge graph construction. It proposes the Document-level Retrieval Augmented Knowledge Graph Construction (RAKG) framework. RAKG extracts pre-entities from text chunks and utilizes these pre-entities as queries for RAG, effectively addressing the issue of long-context forgetting in LLMs and reducing the complexity of Coreference Resolution. In contrast to conventional KGC methods, RAKG more effectively captures global information and the interconnections among disparate nodes, thereby enhancing the overall performance of the model. Additionally, we transfer the RAG evaluation framework to the KGC field and filter and evaluate the generated knowledge graphs, thereby avoiding incorrectly generated entities and relationships caused by hallucinations in LLMs. We further developed the MINE dataset by constructing standard knowledge graphs for each article and experimentally validated the performance of RAKG. The results show that RAKG achieves an accuracy of 95.91 % on the MINE dataset, a 6.2 % point improvement over the current best baseline, GraphRAG (89.71 %). The code is available at https://github.com/LMMApplication/RAKG.
Aligning Vision to Language: Text-Free Multimodal Knowledge Graph Construction for Enhanced LLMs Reasoning
Mar 17, 2025Multimodal reasoning in Large Language Models (LLMs) struggles with incomplete knowledge and hallucination artifacts, challenges that textual Knowledge Graphs (KGs) only partially mitigate due to their modality isolation. While Multimodal Knowledge Graphs (MMKGs) promise enhanced cross-modal understanding, their practical construction is impeded by semantic narrowness of manual text annotations and inherent noise in visual-semantic entity linkages. In this paper, we propose Vision-align-to-Language integrated Knowledge Graph (VaLiK), a novel approach for constructing MMKGs that enhances LLMs reasoning through cross-modal information supplementation. Specifically, we cascade pre-trained Vision-Language Models (VLMs) to align image features with text, transforming them into descriptions that encapsulate image-specific information. Furthermore, we developed a cross-modal similarity verification mechanism to quantify semantic consistency, effectively filtering out noise introduced during feature alignment. Even without manually annotated image captions, the refined descriptions alone suffice to construct the MMKG. Compared to conventional MMKGs construction paradigms, our approach achieves substantial storage efficiency gains while maintaining direct entity-to-image linkage capability. Experimental results on multimodal reasoning tasks demonstrate that LLMs augmented with VaLiK outperform previous state-of-the-art models. Our code is published at https://github.com/Wings-Of-Disaster/VaLiK.
LimSim Series: An Autonomous Driving Simulation Platform for Validation and Enhancement
Feb 13, 2025Closed-loop simulation environments play a crucial role in the validation and enhancement of autonomous driving systems (ADS). However, certain challenges warrant significant attention, including balancing simulation accuracy with duration, reconciling functionality with practicality, and establishing comprehensive evaluation mechanisms. This paper addresses these challenges by introducing the LimSim Series, a comprehensive simulation platform designed to support the rapid deployment and efficient iteration of ADS. The LimSim Series integrates multi-type information from road networks, employs human-like decision-making and planning algorithms for background vehicles, and introduces the concept of the Area of Interest (AoI) to optimize computational resources. The platform offers a variety of baseline algorithms and user-friendly interfaces, facilitating flexible validation of multiple technical pipelines. Additionally, the LimSim Series incorporates multi-dimensional evaluation metrics, delivering thorough insights into system performance, thus enabling researchers to promptly identify issues for further improvements. Experiments demonstrate that the LimSim Series is compatible with modular, end-to-end, and VLM-based knowledge-driven systems. It can assist in the iteration and updating of ADS by evaluating performance across various scenarios. The code of the LimSim Series is released at: https://github.com/PJLab-ADG/LimSim.
Chimera: Improving Generalist Model with Domain-Specific Experts
Dec 08, 2024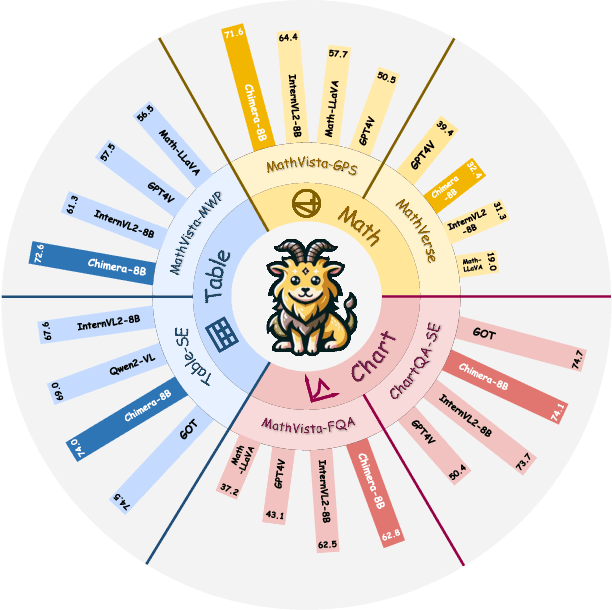
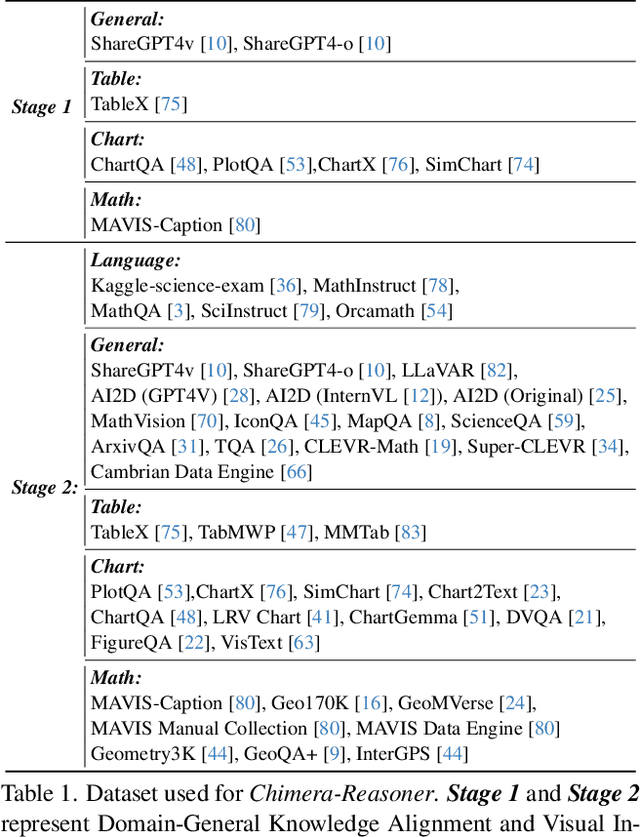
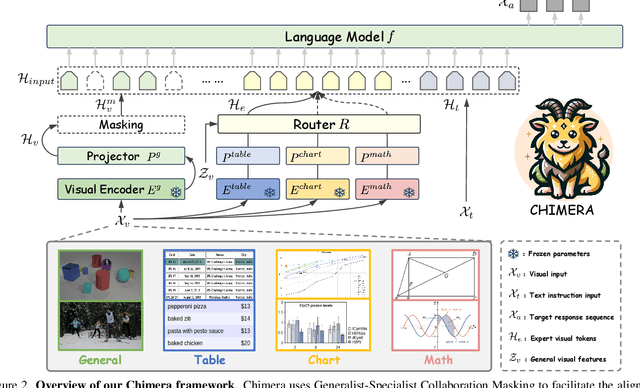
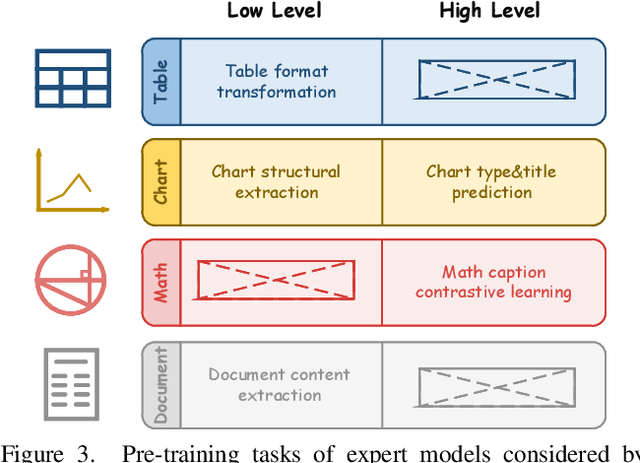
Recent advancements in Large Multi-modal Models (LMMs) underscore the importance of scaling by increasing image-text paired data, achieving impressive performance on general tasks. Despite their effectiveness in broad applications, generalist models are primarily trained on web-scale datasets dominated by natural images, resulting in the sacrifice of specialized capabilities for domain-specific tasks that require extensive domain prior knowledge. Moreover, directly integrating expert models tailored for specific domains is challenging due to the representational gap and imbalanced optimization between the generalist model and experts. To address these challenges, we introduce Chimera, a scalable and low-cost multi-modal pipeline designed to boost the ability of existing LMMs with domain-specific experts. Specifically, we design a progressive training strategy to integrate features from expert models into the input of a generalist LMM. To address the imbalanced optimization caused by the well-aligned general visual encoder, we introduce a novel Generalist-Specialist Collaboration Masking (GSCM) mechanism. This results in a versatile model that excels across the chart, table, math, and document domains, achieving state-of-the-art performance on multi-modal reasoning and visual content extraction tasks, both of which are challenging tasks for assessing existing LMMs.
DocGenome: An Open Large-scale Scientific Document Benchmark for Training and Testing Multi-modal Large Language Models
Jun 17, 2024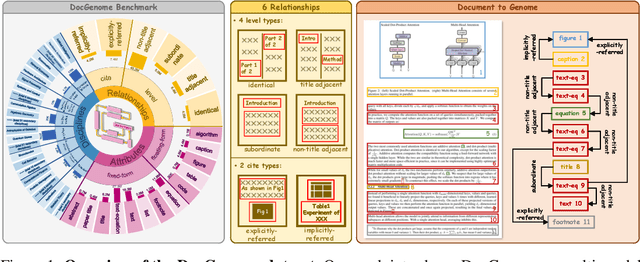
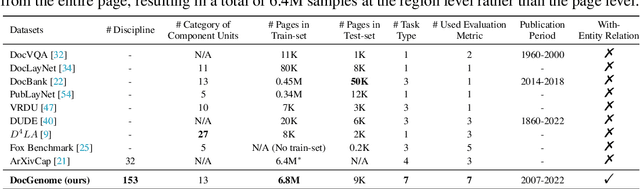
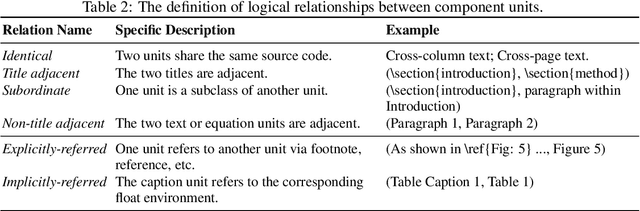
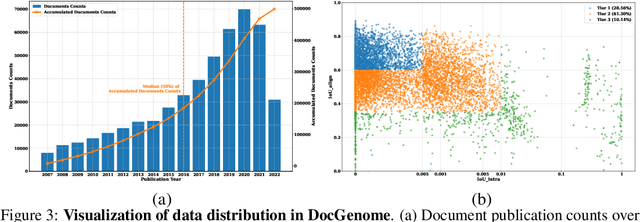
Scientific documents record research findings and valuable human knowledge, comprising a vast corpus of high-quality data. Leveraging multi-modality data extracted from these documents and assessing large models' abilities to handle scientific document-oriented tasks is therefore meaningful. Despite promising advancements, large models still perform poorly on multi-page scientific document extraction and understanding tasks, and their capacity to process within-document data formats such as charts and equations remains under-explored. To address these issues, we present DocGenome, a structured document benchmark constructed by annotating 500K scientific documents from 153 disciplines in the arXiv open-access community, using our custom auto-labeling pipeline. DocGenome features four key characteristics: 1) Completeness: It is the first dataset to structure data from all modalities including 13 layout attributes along with their LaTeX source codes. 2) Logicality: It provides 6 logical relationships between different entities within each scientific document. 3) Diversity: It covers various document-oriented tasks, including document classification, visual grounding, document layout detection, document transformation, open-ended single-page QA and multi-page QA. 4) Correctness: It undergoes rigorous quality control checks conducted by a specialized team. We conduct extensive experiments to demonstrate the advantages of DocGenome and objectively evaluate the performance of large models on our benchmark.
LimSim++: A Closed-Loop Platform for Deploying Multimodal LLMs in Autonomous Driving
Feb 02, 2024The emergence of Multimodal Large Language Models ((M)LLMs) has ushered in new avenues in artificial intelligence, particularly for autonomous driving by offering enhanced understanding and reasoning capabilities. This paper introduces LimSim++, an extended version of LimSim designed for the application of (M)LLMs in autonomous driving. Acknowledging the limitations of existing simulation platforms, LimSim++ addresses the need for a long-term closed-loop infrastructure supporting continuous learning and improved generalization in autonomous driving. The platform offers extended-duration, multi-scenario simulations, providing crucial information for (M)LLM-driven vehicles. Users can engage in prompt engineering, model evaluation, and framework enhancement, making LimSim++ a versatile tool for research and practice. This paper additionally introduces a baseline (M)LLM-driven framework, systematically validated through quantitative experiments across diverse scenarios. The open-source resources of LimSim++ are available at: https://pjlab-adg.github.io/limsim_plus/.
TrafficMCTS: A Closed-Loop Traffic Flow Generation Framework with Group-Based Monte Carlo Tree Search
Aug 31, 2023


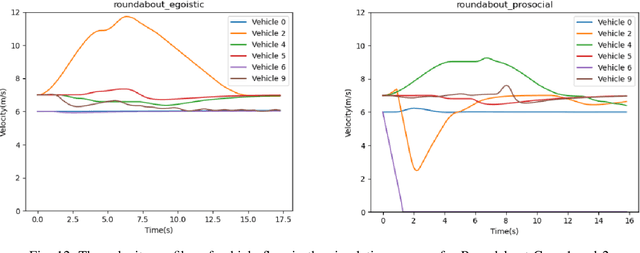
Digital twins for intelligent transportation systems are currently attracting great interests, in which generating realistic, diverse, and human-like traffic flow in simulations is a formidable challenge. Current approaches often hinge on predefined driver models, objective optimization, or reliance on pre-recorded driving datasets, imposing limitations on their scalability, versatility, and adaptability. In this paper, we introduce TrafficMCTS, an innovative framework that harnesses the synergy of groupbased Monte Carlo tree search (MCTS) and Social Value Orientation (SVO) to engender a multifaceted traffic flow replete with varying driving styles and cooperative tendencies. Anchored by a closed-loop architecture, our framework enables vehicles to dynamically adapt to their environment in real time, and ensure feasible collision-free trajectories. Through comprehensive comparisons with state-of-the-art methods, we illuminate the advantages of our approach in terms of computational efficiency, planning success rate, intent completion time, and diversity metrics. Besides, we simulate highway and roundabout scenarios to illustrate the effectiveness of the proposed framework and highlight its ability to induce diverse social behaviors within the traffic flow. Finally, we validate the scalability of TrafficMCTS by showcasing its prowess in simultaneously mass vehicles within a sprawling road network, cultivating a landscape of traffic flow that mirrors the intricacies of human behavior.
LimSim: A Long-term Interactive Multi-scenario Traffic Simulator
Jul 26, 2023With the growing popularity of digital twin and autonomous driving in transportation, the demand for simulation systems capable of generating high-fidelity and reliable scenarios is increasing. Existing simulation systems suffer from a lack of support for different types of scenarios, and the vehicle models used in these systems are too simplistic. Thus, such systems fail to represent driving styles and multi-vehicle interactions, and struggle to handle corner cases in the dataset. In this paper, we propose LimSim, the Long-term Interactive Multi-scenario traffic Simulator, which aims to provide a long-term continuous simulation capability under the urban road network. LimSim can simulate fine-grained dynamic scenarios and focus on the diverse interactions between multiple vehicles in the traffic flow. This paper provides a detailed introduction to the framework and features of the LimSim, and demonstrates its performance through case studies and experiments. LimSim is now open source on GitHub: https://www.github.com/PJLab-ADG/LimSim .