 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriveArena: A Closed-loop Generative Simulation Platform for Autonomous Driving
Aug 01, 2024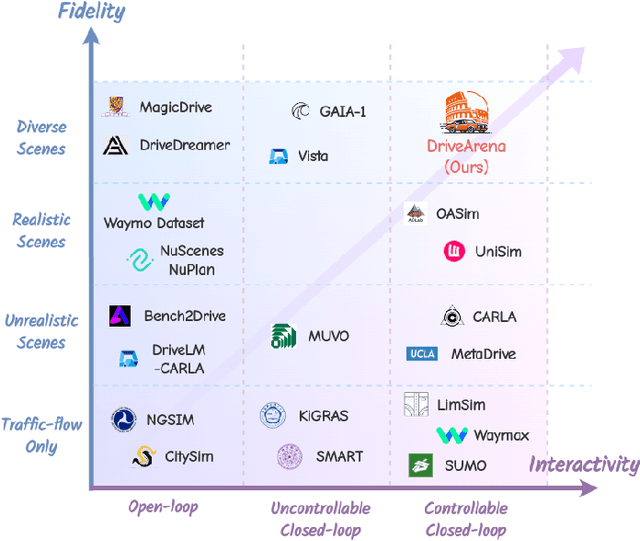

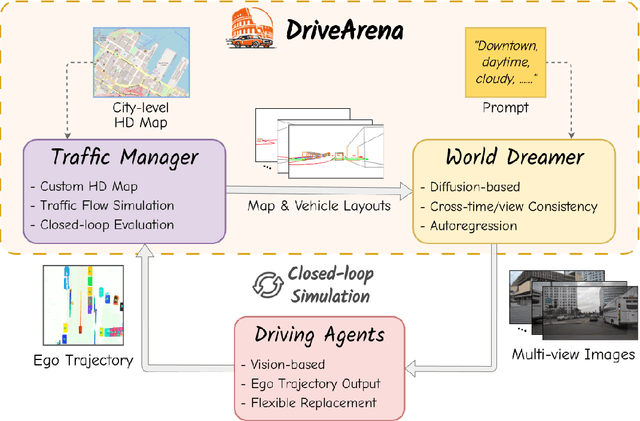

This paper presented DriveArena, the first high-fidelity closed-loop simulation system designed for driving agents navigating in real scenarios. DriveArena features a flexible, modular architecture, allowing for the seamless interchange of its core components: Traffic Manager, a traffic simulator capable of generating realistic traffic flow on any worldwide street map, and World Dreamer, a high-fidelity conditional generative model with infinite autoregression. This powerful synergy empowers any driving agent capable of processing real-world images to navigate in DriveArena's simulated environment. The agent perceives its surroundings through images generated by World Dreamer and output trajectories. These trajectories are fed into Traffic Manager, achieving realistic interactions with other vehicles and producing a new scene layout. Finally, the latest scene layout is relayed back into World Dreamer, perpetuating the simulation cycle. This iterative process fosters closed-loop exploration within a highly realistic environment, providing a valuable platform for developing and evaluating driving agents across diverse and challenging scenarios. DriveArena signifies a substantial leap forward in leveraging generative image data for the driving simulation platform, opening insights for closed-loop autonomous driving. Code will be available soon on GitHub: https://github.com/PJLab-ADG/DriveArena
LimSim++: A Closed-Loop Platform for Deploying Multimodal LLMs in Autonomous Driving
Feb 02, 2024The emergence of Multimodal Large Language Models ((M)LLMs) has ushered in new avenues in artificial intelligence, particularly for autonomous driving by offering enhanced understanding and reasoning capabilities. This paper introduces LimSim++, an extended version of LimSim designed for the application of (M)LLMs in autonomous driving. Acknowledging the limitations of existing simulation platforms, LimSim++ addresses the need for a long-term closed-loop infrastructure supporting continuous learning and improved generalization in autonomous driving. The platform offers extended-duration, multi-scenario simulations, providing crucial information for (M)LLM-driven vehicles. Users can engage in prompt engineering, model evaluation, and framework enhancement, making LimSim++ a versatile tool for research and practice. This paper additionally introduces a baseline (M)LLM-driven framework, systematically validated through quantitative experiments across diverse scenarios. The open-source resources of LimSim++ are available at: https://pjlab-adg.github.io/limsim_plus/.