 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Agent's First Day: Benchmarking Learning, Exploration, and Scheduling in the Workplace Scenarios
Jan 13, 2026The rapid evolution of Multi-modal Large Language Models (MLLMs) has advanced workflow automation; however, existing research mainly targets performance upper bounds in static environments, overlooking robustness for stochastic real-world deployment. We identify three key challenges: dynamic task scheduling, active exploration under uncertainty, and continuous learning from experience. To bridge this gap, we introduce \method{}, a dynamic evaluation environment that simulates a "trainee" agent continuously exploring a novel setting. Unlike traditional benchmarks, \method{} evaluates agents along three dimensions: (1) context-aware scheduling for streaming tasks with varying priorities; (2) prudent information acquisition to reduce hallucination via active exploration; and (3) continuous evolution by distilling generalized strategies from rule-based, dynamically generated tasks. Experiments show that cutting-edge agents have significant deficiencies in dynamic environments, especially in active exploration and continual learning. Our work establishes a framework for assessing agent reliability, shifting evaluation from static tests to realistic, production-oriented scenarios. Our codes are available at https://github.com/KnowledgeXLab/EvoEnv
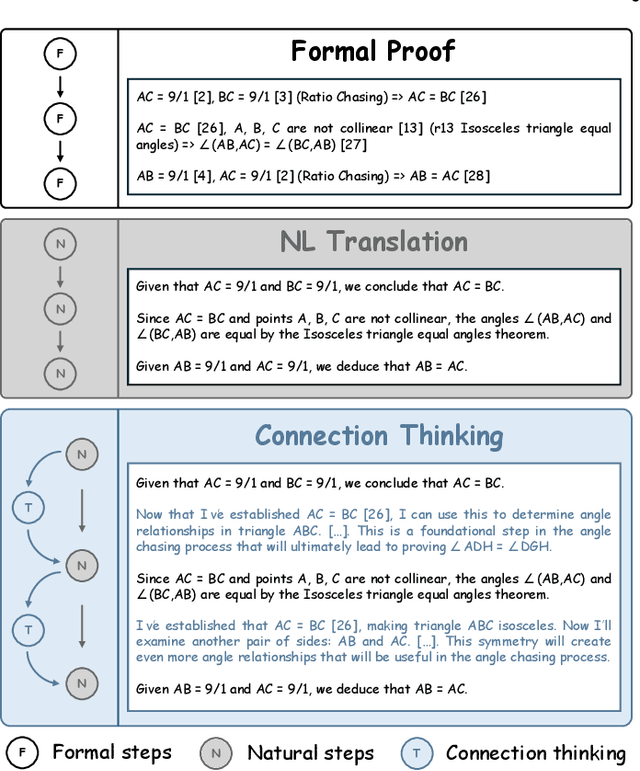
Milestones over Outcome: Unlocking Geometric Reasoning with Sub-Goal Verifiable Reward
Jan 08, 2026Multimodal Large Language Models (MLLMs) struggle with complex geometric reasoning, largely because "black box" outcome-based supervision fails to distinguish between lucky guesses and rigorous deduction. To address this, we introduce a paradigm shift towards subgoal-level evaluation and learning. We first construct GeoGoal, a benchmark synthesized via a rigorous formal verification data engine, which converts abstract proofs into verifiable numeric subgoals. This structure reveals a critical divergence between reasoning quality and outcome accuracy. Leveraging this, we propose the Sub-Goal Verifiable Reward (SGVR) framework, which replaces sparse signals with dense rewards based on the Skeleton Rate. Experiments demonstrate that SGVR not only enhances geometric performance (+9.7%) but also exhibits strong generalization, transferring gains to general math (+8.0%) and other general reasoning tasks (+2.8%), demonstrating broad applicability across diverse domains.
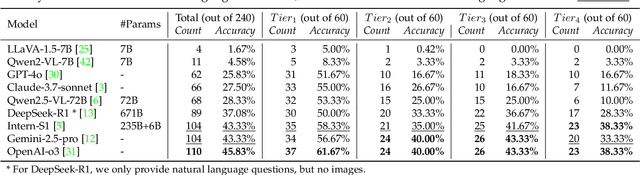
GeoBench: Rethinking Multimodal Geometric Problem-Solving via Hierarchical Evaluation
Dec 30, 2025Geometric problem solving constitutes a critical branch of mathematical reasoning, requiring precise analysis of shapes and spatial relationships. Current evaluations of geometric reasoning in vision-language models (VLMs) face limitations, including the risk of test data contamination from textbook-based benchmarks, overemphasis on final answers over reasoning processes, and insufficient diagnostic granularity. To address these issues, we present GeoBench, a hierarchical benchmark featuring four reasoning levels in geometric problem-solving: Visual Perception, Goal-Oriented Planning, Rigorous Theorem Application, and Self-Reflective Backtracking. Through six formally verified tasks generated via TrustGeoGen, we systematically assess capabilities ranging from attribute extraction to logical error correction. Experiments reveal that while reasoning models like OpenAI-o3 outperform general MLLMs, performance declines significantly with increasing task complexity. Key findings demonstrate that sub-goal decomposition and irrelevant premise filtering critically influence final problem-solving accuracy, whereas Chain-of-Thought prompting unexpectedly degrades performance in some tasks. These findings establish GeoBench as a comprehensive benchmark while offering actionable guidelines for developing geometric problem-solving systems.
SymDrive: Realistic and Controllable Driving Simulator via Symmetric Auto-regressive Online Restoration
Dec 25, 2025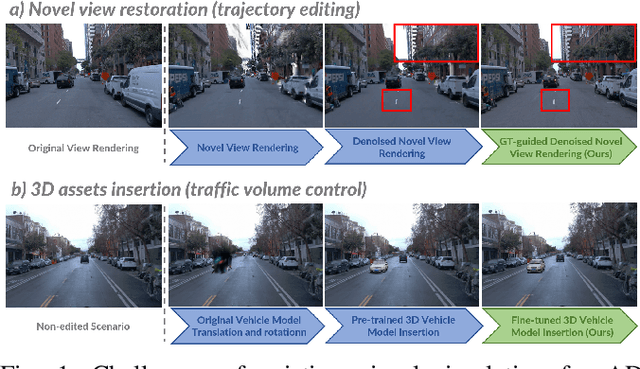
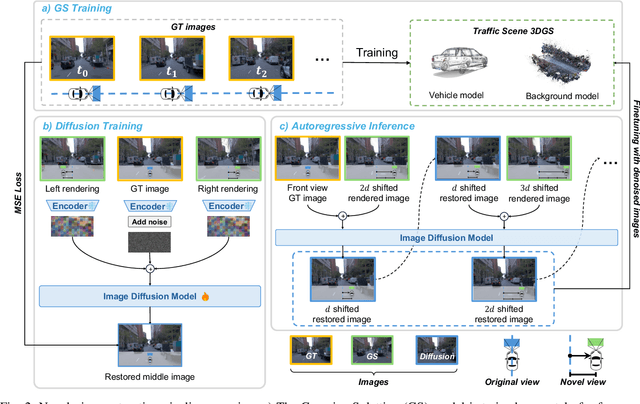
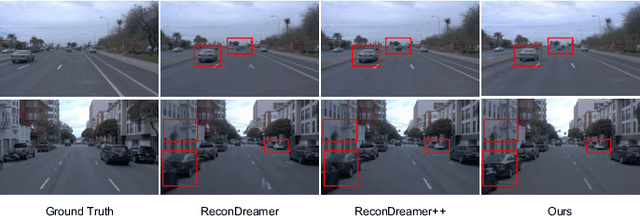
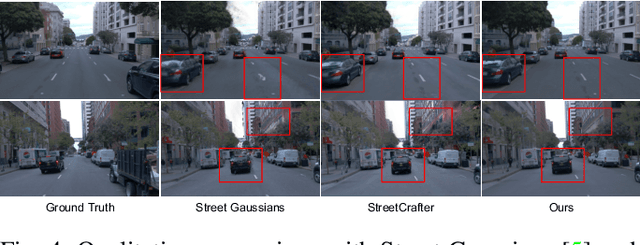
High-fidelity and controllable 3D simulation is essential for addressing the long-tail data scarcity in Autonomous Driving (AD), yet existing methods struggle to simultaneously achieve photorealistic rendering and interactive traffic editing. Current approaches often falter in large-angle novel view synthesis and suffer from geometric or lighting artifacts during asset manipulation. To address these challenges, we propose SymDrive, a unified diffusion-based framework capable of joint high-quality rendering and scene editing. We introduce a Symmetric Auto-regressive Online Restoration paradigm, which constructs paired symmetric views to recover fine-grained details via a ground-truth-guided dual-view formulation and utilizes an auto-regressive strategy for consistent lateral view generation. Furthermore, we leverage this restoration capability to enable a training-free harmonization mechanism, treating vehicle insertion as context-aware inpainting to ensure seamless lighting and shadow consistency. Extensive experiments demonstrate that SymDrive achieves state-of-the-art performance in both novel-view enhancement and realistic 3D vehicle insertion.
Learning on the Job: An Experience-Driven Self-Evolving Agent for Long-Horizon Tasks
Oct 09, 2025Large Language Models have demonstrated remarkable capabilities across diverse domains, yet significant challenges persist when deploying them as AI agents for real-world long-horizon tasks. Existing LLM agents suffer from a critical limitation: they are test-time static and cannot learn from experience, lacking the ability to accumulate knowledge and continuously improve on the job. To address this challenge, we propose MUSE, a novel agent framework that introduces an experience-driven, self-evolving system centered around a hierarchical Memory Module. MUSE organizes diverse levels of experience and leverages them to plan and execute long-horizon tasks across multiple applications. After each sub-task execution, the agent autonomously reflects on its trajectory, converting the raw trajectory into structured experience and integrating it back into the Memory Module. This mechanism enables the agent to evolve beyond its static pretrained parameters, fostering continuous learning and self-evolution. We evaluate MUSE on the long-horizon productivity benchmark TAC. It achieves new SOTA performance by a significant margin using only a lightweight Gemini-2.5 Flash model. Sufficient Experiments demonstrate that as the agent autonomously accumulates experience, it exhibits increasingly superior task completion capabilities, as well as robust continuous learning and self-evolution capabilities. Moreover, the accumulated experience from MUSE exhibits strong generalization properties, enabling zero-shot improvement on new tasks. MUSE establishes a new paradigm for AI agents capable of real-world productivity task automation.
O$^2$-Searcher: A Searching-based Agent Model for Open-Domain Open-Ended Question Answering
May 22, 2025Large Language Models (LLMs), despite their advancements, are fundamentally limited by their static parametric knowledge, hindering performance on tasks requiring open-domain up-to-date information. While enabling LLMs to interact with external knowledge environments is a promising solution, current efforts primarily address closed-end problems. Open-ended questions, which characterized by lacking a standard answer or providing non-unique and diverse answers, remain underexplored. To bridge this gap, we present O$^2$-Searcher, a novel search agent leveraging reinforcement learning to effectively tackle both open-ended and closed-ended questions in the open domain. O$^2$-Searcher leverages an efficient, locally simulated search environment for dynamic knowledge acquisition, effectively decoupling the external world knowledge from model's sophisticated reasoning processes. It employs a unified training mechanism with meticulously designed reward functions, enabling the agent to identify problem types and adapt different answer generation strategies. Furthermore, to evaluate performance on complex open-ended tasks, we construct O$^2$-QA, a high-quality benchmark featuring 300 manually curated, multi-domain open-ended questions with associated web page caches. Extensive experiments show that O$^2$-Searcher, using only a 3B model, significantly surpasses leading LLM agents on O$^2$-QA. It also achieves SOTA results on various closed-ended QA benchmarks against similarly-sized models, while performing on par with much larger ones.
TrustGeoGen: Scalable and Formal-Verified Data Engine for Trustworthy Multi-modal Geometric Problem Solving
Apr 22, 2025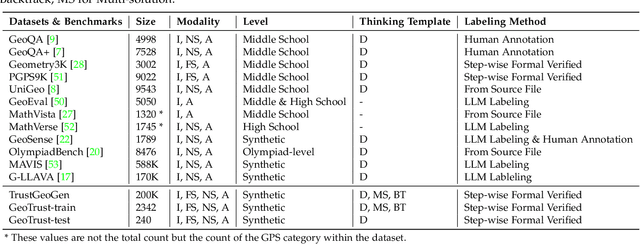
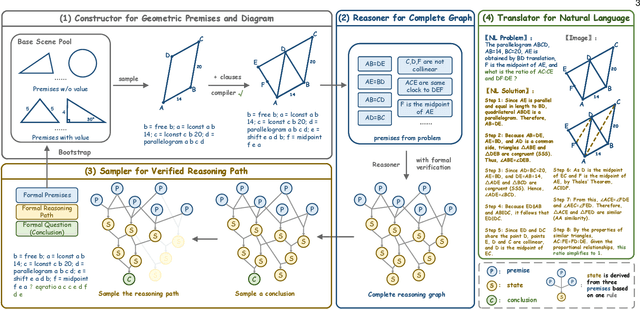
Mathematical geometric problem solving (GPS) often requires effective integration of multimodal information and verifiable logical coherence. Despite the fast development of large language models in general problem solving, it remains unresolved regarding with both methodology and benchmarks, especially given the fact that exiting synthetic GPS benchmarks are often not self-verified and contain noise and self-contradicted information due to the illusion of LLMs. In this paper, we propose a scalable data engine called TrustGeoGen for problem generation, with formal verification to provide a principled benchmark, which we believe lays the foundation for the further development of methods for GPS. The engine synthesizes geometric data through four key innovations: 1) multimodal-aligned generation of diagrams, textual descriptions, and stepwise solutions; 2) formal verification ensuring rule-compliant reasoning paths; 3) a bootstrapping mechanism enabling complexity escalation via recursive state generation and 4) our devised GeoExplore series algorithms simultaneously produce multi-solution variants and self-reflective backtracking traces. By formal logical verification, TrustGeoGen produces GeoTrust-200K dataset with guaranteed modality integrity, along with GeoTrust-test testset. Experiments reveal the state-of-the-art models achieve only 49.17\% accuracy on GeoTrust-test, demonstrating its evaluation stringency. Crucially, models trained on GeoTrust achieve OOD generalization on GeoQA, significantly reducing logical inconsistencies relative to pseudo-label annotated by OpenAI-o1. Our code is available at https://github.com/Alpha-Innovator/TrustGeoGen
MM-Eureka: Exploring Visual Aha Moment with Rule-based Large-scale Reinforcement Learning
Mar 10, 2025We present MM-Eureka, a multimodal reasoning model that successfully extends large-scale rule-based reinforcement learning (RL) to multimodal reasoning. While rule-based RL has shown remarkable success in improving LLMs' reasoning abilities in text domains, its application to multimodal settings has remained challenging. Our work reproduces key characteristics of text-based RL systems like DeepSeek-R1 in the multimodal space, including steady increases in accuracy reward and response length, and the emergence of reflection behaviors. We demonstrate that both instruction-tuned and pre-trained models can develop strong multimodal reasoning capabilities through rule-based RL without supervised fine-tuning, showing superior data efficiency compared to alternative approaches. We open-source our complete pipeline to foster further research in this area. We release all our codes, models, data, etc. at https://github.com/ModalMinds/MM-EUREKA
Text2Scenario: Text-Driven Scenario Generation for Autonomous Driving Test
Mar 04, 2025Autonomous driving (AD) testing constitutes a critical methodology for assessing performance benchmarks prior to product deployment. The creation of segmented scenarios within a simulated environment is acknowledged as a robust and effective strategy; however, the process of tailoring these scenarios often necessitates laborious and time-consuming manual efforts, thereby hindering the development and implementation of AD technologies. In response to this challenge, we introduce Text2Scenario, a framework that leverages a Large Language Model (LLM) to autonomously generate simulation test scenarios that closely align with user specifications, derived from their natural language inputs. Specifically, an LLM, equipped with a meticulously engineered input prompt scheme functions as a text parser for test scenario descriptions, extracting from a hierarchically organized scenario repository the components that most accurately reflect the user's preferences. Subsequently, by exploiting the precedence of scenario components, the process involves sequentially matching and linking scenario representations within a Domain Specific Language corpus, ultimately fabricating executable test scenarios. The experimental results demonstrate that such prompt engineering can meticulously extract the nuanced details of scenario elements embedded within various descriptive formats, with the majority of generated scenarios aligning closely with the user's initial expectations, allowing for the efficient and precise evaluation of diverse AD stacks void of the labor-intensive need for manual scenario configuration. Project page: https://caixxuan.github.io/Text2Scenario.GitHub.io.
LimSim Series: An Autonomous Driving Simulation Platform for Validation and Enhancement
Feb 13, 2025Closed-loop simulation environments play a crucial role in the validation and enhancement of autonomous driving systems (ADS). However, certain challenges warrant significant attention, including balancing simulation accuracy with duration, reconciling functionality with practicality, and establishing comprehensive evaluation mechanisms. This paper addresses these challenges by introducing the LimSim Series, a comprehensive simulation platform designed to support the rapid deployment and efficient iteration of ADS. The LimSim Series integrates multi-type information from road networks, employs human-like decision-making and planning algorithms for background vehicles, and introduces the concept of the Area of Interest (AoI) to optimize computational resources. The platform offers a variety of baseline algorithms and user-friendly interfaces, facilitating flexible validation of multiple technical pipelines. Additionally, the LimSim Series incorporates multi-dimensional evaluation metrics, delivering thorough insights into system performance, thus enabling researchers to promptly identify issues for further improvements. Experiments demonstrate that the LimSim Series is compatible with modular, end-to-end, and VLM-based knowledge-driven systems. It can assist in the iteration and updating of ADS by evaluating performance across various scenarios. The code of the LimSim Series is released at: https://github.com/PJLab-ADG/LimSim.