 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUV-M3TL: A Unified and Versatile Multimodal Multi-Task Learning Framework for Assistive Driving Perception
Feb 02, 2026Advanced Driver Assistance Systems (ADAS) need to understand human driver behavior while perceiving their navigation context, but jointly learning these heterogeneous tasks would cause inter-task negative transfer and impair system performance. Here, we propose a Unified and Versatile Multimodal Multi-Task Learning (UV-M3TL) framework to simultaneously recognize driver behavior, driver emotion, vehicle behavior, and traffic context, while mitigating inter-task negative transfer. Our framework incorporates two core components: dual-branch spatial channel multimodal embedding (DB-SCME) and adaptive feature-decoupled multi-task loss (AFD-Loss). DB-SCME enhances cross-task knowledge transfer while mitigating task conflicts by employing a dual-branch structure to explicitly model salient task-shared and task-specific features. AFD-Loss improves the stability of joint optimization while guiding the model to learn diverse multi-task representations by introducing an adaptive weighting mechanism based on learning dynamics and feature decoupling constraints. We evaluate our method on the AIDE dataset, and the experimental results demonstrate that UV-M3TL achieves state-of-the-art performance across all four tasks. To further prove the versatility, we evaluate UV-M3TL on additional public multi-task perception benchmarks (BDD100K, CityScapes, NYUD-v2, and PASCAL-Context), where it consistently delivers strong performance across diverse task combinations, attaining state-of-the-art results on most tasks.
SymDrive: Realistic and Controllable Driving Simulator via Symmetric Auto-regressive Online Restoration
Dec 25, 2025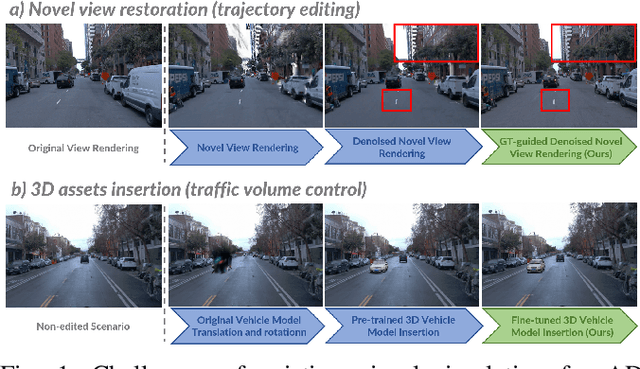
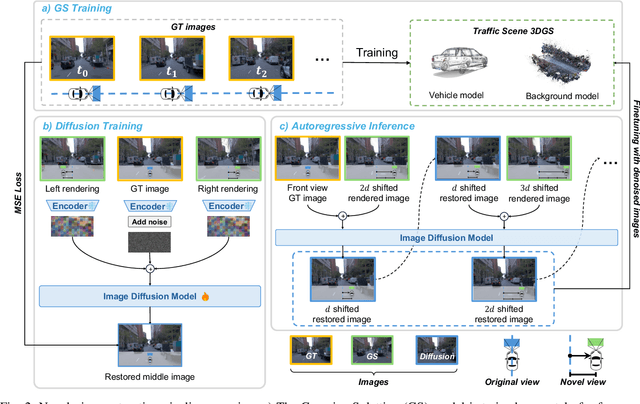
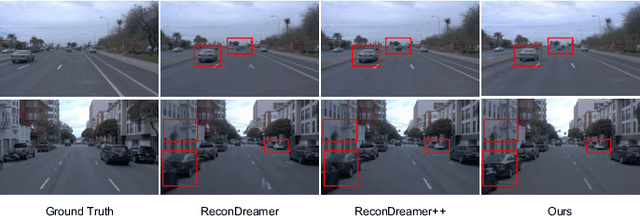
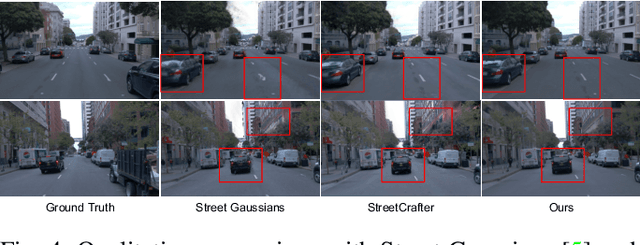
High-fidelity and controllable 3D simulation is essential for addressing the long-tail data scarcity in Autonomous Driving (AD), yet existing methods struggle to simultaneously achieve photorealistic rendering and interactive traffic editing. Current approaches often falter in large-angle novel view synthesis and suffer from geometric or lighting artifacts during asset manipulation. To address these challenges, we propose SymDrive, a unified diffusion-based framework capable of joint high-quality rendering and scene editing. We introduce a Symmetric Auto-regressive Online Restoration paradigm, which constructs paired symmetric views to recover fine-grained details via a ground-truth-guided dual-view formulation and utilizes an auto-regressive strategy for consistent lateral view generation. Furthermore, we leverage this restoration capability to enable a training-free harmonization mechanism, treating vehicle insertion as context-aware inpainting to ensure seamless lighting and shadow consistency. Extensive experiments demonstrate that SymDrive achieves state-of-the-art performance in both novel-view enhancement and realistic 3D vehicle insertion.
MMTL-UniAD: A Unified Framework for Multimodal and Multi-Task Learning in Assistive Driving Perception
Apr 03, 2025Advanced driver assistance systems require a comprehensive understanding of the driver's mental/physical state and traffic context but existing works often neglect the potential benefits of joint learning between these tasks. This paper proposes MMTL-UniAD, a unified multi-modal multi-task learning framework that simultaneously recognizes driver behavior (e.g., looking around, talking), driver emotion (e.g., anxiety, happiness), vehicle behavior (e.g., parking, turning), and traffic context (e.g., traffic jam, traffic smooth). A key challenge is avoiding negative transfer between tasks, which can impair learning performance. To address this, we introduce two key components into the framework: one is the multi-axis region attention network to extract global context-sensitive features, and the other is the dual-branch multimodal embedding to learn multimodal embeddings from both task-shared and task-specific features. The former uses a multi-attention mechanism to extract task-relevant features, mitigating negative transfer caused by task-unrelated features. The latter employs a dual-branch structure to adaptively adjust task-shared and task-specific parameters, enhancing cross-task knowledge transfer while reducing task conflicts. We assess MMTL-UniAD on the AIDE dataset, using a series of ablation studies, and show that it outperforms state-of-the-art methods across all four tasks. The code is available on https://github.com/Wenzhuo-Liu/MMTL-UniAD.
Stag-1: Towards Realistic 4D Driving Simulation with Video Generation Model
Dec 06, 2024



4D driving simulation is essential for developing realistic autonomous driving simulators. Despite advancements in existing methods for generating driving scenes, significant challenges remain in view transformation and spatial-temporal dynamic modeling. To address these limitations, we propose a Spatial-Temporal simulAtion for drivinG (Stag-1) model to reconstruct real-world scenes and design a controllable generative network to achieve 4D simulation. Stag-1 constructs continuous 4D point cloud scenes using surround-view data from autonomous vehicles. It decouples spatial-temporal relationships and produces coherent keyframe videos. Additionally, Stag-1 leverages video generation models to obtain photo-realistic and controllable 4D driving simulation videos from any perspective. To expand the range of view generation, we train vehicle motion videos based on decomposed camera poses, enhancing modeling capabilities for distant scenes. Furthermore, we reconstruct vehicle camera trajectories to integrate 3D points across consecutive views, enabling comprehensive scene understanding along the temporal dimension. Following extensive multi-level scene training, Stag-1 can simulate from any desired viewpoint and achieve a deep understanding of scene evolution under static spatial-temporal conditions. Compared to existing methods, our approach shows promising performance in multi-view scene consistency, background coherence, and accuracy, and contributes to the ongoing advancements in realistic autonomous driving simulation. Code: https://github.com/wzzheng/Stag.
OccSora: 4D Occupancy Generation Models as World Simulators for Autonomous Driving
May 30, 2024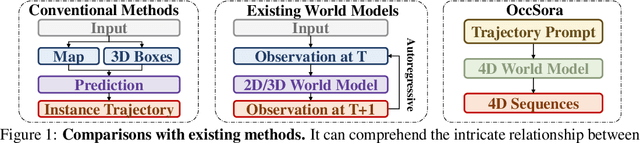
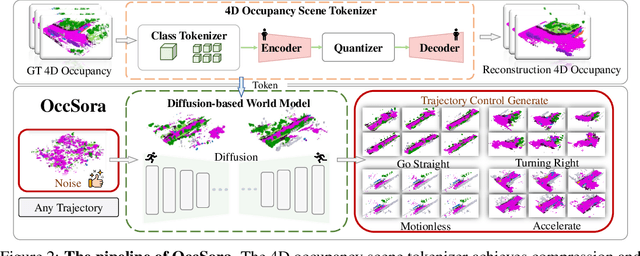
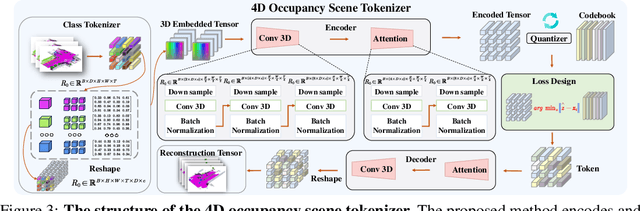
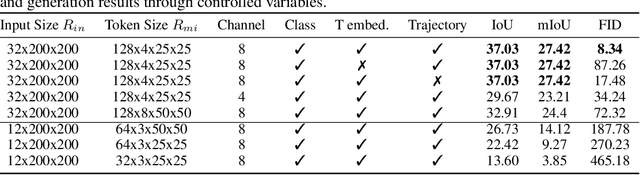
Understanding the evolution of 3D scenes is important for effective autonomous driving. While conventional methods mode scene development with the motion of individual instances, world models emerge as a generative framework to describe the general scene dynamics. However, most existing methods adopt an autoregressive framework to perform next-token prediction, which suffer from inefficiency in modeling long-term temporal evolutions. To address this, we propose a diffusion-based 4D occupancy generation model, OccSora, to simulate the development of the 3D world for autonomous driving. We employ a 4D scene tokenizer to obtain compact discrete spatial-temporal representations for 4D occupancy input and achieve high-quality reconstruction for long-sequence occupancy videos. We then learn a diffusion transformer on the spatial-temporal representations and generate 4D occupancy conditioned on a trajectory prompt. We conduct extensive experiments on the widely used nuScenes dataset with Occ3D occupancy annotations. OccSora can generate 16s-videos with authentic 3D layout and temporal consistency, demonstrating its ability to understand the spatial and temporal distributions of driving scenes. With trajectory-aware 4D generation, OccSora has the potential to serve as a world simulator for the decision-making of autonomous driving. Code is available at: https://github.com/wzzheng/OccSora.
AccidentGPT: Accident Analysis and Prevention from V2X Environmental Perception with Multi-modal Large Model
Dec 29, 2023



Traffic accidents, being a significant contributor to both human casualties and property damage, have long been a focal point of research for many scholars in the field of traffic safety. However, previous studies, whether focusing on static environmental assessments or dynamic driving analyses, as well as pre-accident predictions or post-accident rule analyses, have typically been conducted in isolation. There has been a lack of an effective framework for developing a comprehensive understanding and application of traffic safety. To address this gap, this paper introduces AccidentGPT, a comprehensive accident analysis and prevention multi-modal large model. AccidentGPT establishes a multi-modal information interaction framework grounded in multi-sensor perception, thereby enabling a holistic approach to accident analysis and prevention in the field of traffic safety. Specifically, our capabilities can be categorized as follows: for autonomous driving vehicles, we provide comprehensive environmental perception and understanding to control the vehicle and avoid collisions. For human-driven vehicles, we offer proactive long-range safety warnings and blind-spot alerts while also providing safety driving recommendations and behavioral norms through human-machine dialogue and interaction. Additionally, for traffic police and management agencies, our framework supports intelligent and real-time analysis of traffic safety, encompassing pedestrian, vehicles, roads, and the environment through collaborative perception from multiple vehicles and road testing devices. The system is also capable of providing a thorough analysis of accident causes and liability after vehicle collisions. Our framework stands as the first large model to integrate comprehensive scene understanding into traffic safety studies. Project page: https://accidentgpt.github.io
Shift-BNN: Highly-Efficient Probabilistic Bayesian Neural Network Training via Memory-Friendly Pattern Retrieving
Oct 07, 2021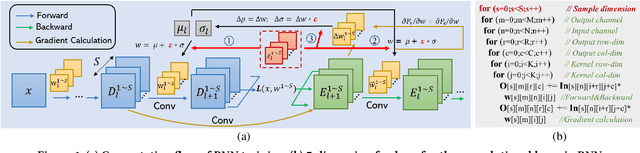
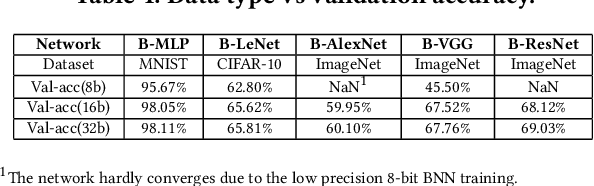
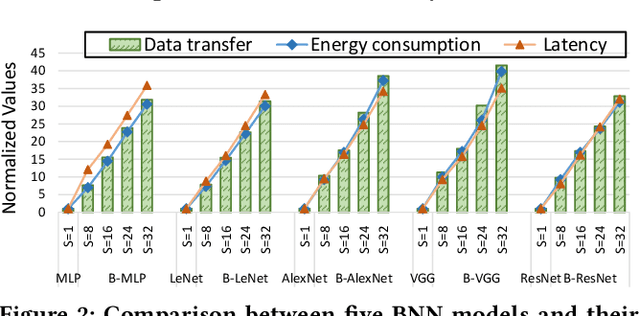
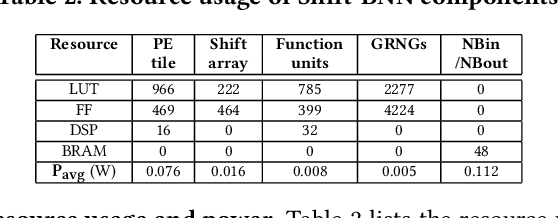
Bayesian Neural Networks (BNNs) that possess a property of uncertainty estimation have been increasingly adopted in a wide range of safety-critical AI applications which demand reliable and robust decision making, e.g., self-driving, rescue robots, medical image diagnosis. The training procedure of a probabilistic BNN model involves training an ensemble of sampled DNN models, which induces orders of magnitude larger volume of data movement than training a single DNN model. In this paper, we reveal that the root cause for BNN training inefficiency originates from the massive off-chip data transfer by Gaussian Random Variables (GRVs). To tackle this challenge, we propose a novel design that eliminates all the off-chip data transfer by GRVs through the reversed shifting of Linear Feedback Shift Registers (LFSRs) without incurring any training accuracy loss. To efficiently support our LFSR reversion strategy at the hardware level, we explore the design space of the current DNN accelerators and identify the optimal computation mapping scheme to best accommodate our strategy. By leveraging this finding, we design and prototype the first highly efficient BNN training accelerator, named Shift-BNN, that is low-cost and scalable. Extensive evaluation on five representative BNN models demonstrates that Shift-BNN achieves an average of 4.9x (up to 10.8x) boost in energy efficiency and 1.6x (up to 2.8x) speedup over the baseline DNN training accelerator.