 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComposite Safety Potential Field for Highway Driving Risk Assessment
Apr 29, 2025In the era of rapid advancements in vehicle safety technologies, driving risk assessment has become a focal point of attention. Technologies such as collision warning systems, advanced driver assistance systems (ADAS), and autonomous driving require driving risks to be evaluated proactively and in real time. To be effective, driving risk assessment metrics must not only accurately identify potential collisions but also exhibit human-like reasoning to enable safe and seamless interactions between vehicles. Existing safety potential field models assess driving risks by considering both objective and subjective safety factors. However, their practical applicability in real-world risk assessment tasks is limited. These models are often challenging to calibrate due to the arbitrary nature of their structures, and calibration can be inefficient because of the scarcity of accident statistics. Additionally, they struggle to generalize across both longitudinal and lateral risks. To address these challenges, we propose a composite safety potential field framework, namely C-SPF, involving a subjective field to capture drivers' risk perception about spatial proximity and an objective field to quantify the imminent collision probability, to comprehensively evaluate driving risks. The C-SPF is calibrated using abundant two-dimensional spacing data from trajectory datasets, enabling it to effectively capture drivers' proximity risk perception and provide a more realistic explanation of driving behaviors. Analysis of a naturalistic driving dataset demonstrates that the C-SPF can capture both longitudinal and lateral risks that trigger drivers' safety maneuvers. Further case studies highlight the C-SPF's ability to explain lateral driver behaviors, such as abandoning lane changes or adjusting lateral position relative to adjacent vehicles, which are capabilities that existing models fail to achieve.
Traffic Adaptive Moving-window Service Patrolling for Real-time Incident Management during High-impact Events
Apr 15, 2025



This paper presents the Traffic Adaptive Moving-window Patrolling Algorithm (TAMPA), designed to improve real-time incident management during major events like sports tournaments and concerts. Such events significantly stress transportation networks, requiring efficient and adaptive patrol solutions. TAMPA integrates predictive traffic modeling and real-time complaint estimation, dynamically optimizing patrol deployment. Using dynamic programming, the algorithm continuously adjusts patrol strategies within short planning windows, effectively balancing immediate response and efficient routing. Leveraging the Dvoretzky-Kiefer-Wolfowitz inequality, TAMPA detects significant shifts in complaint patterns, triggering proactive adjustments in patrol routes. Theoretical analyses ensure performance remains closely aligned with optimal solutions. Simulation results from an urban traffic network demonstrate TAMPA's superior performance, showing improvements of approximately 87.5\% over stationary methods and 114.2\% over random strategies. Future work includes enhancing adaptability and incorporating digital twin technology for improved predictive accuracy, particularly relevant for events like the 2026 FIFA World Cup at MetLife Stadium.
Aligning Vision to Language: Text-Free Multimodal Knowledge Graph Construction for Enhanced LLMs Reasoning
Mar 17, 2025Multimodal reasoning in Large Language Models (LLMs) struggles with incomplete knowledge and hallucination artifacts, challenges that textual Knowledge Graphs (KGs) only partially mitigate due to their modality isolation. While Multimodal Knowledge Graphs (MMKGs) promise enhanced cross-modal understanding, their practical construction is impeded by semantic narrowness of manual text annotations and inherent noise in visual-semantic entity linkages. In this paper, we propose Vision-align-to-Language integrated Knowledge Graph (VaLiK), a novel approach for constructing MMKGs that enhances LLMs reasoning through cross-modal information supplementation. Specifically, we cascade pre-trained Vision-Language Models (VLMs) to align image features with text, transforming them into descriptions that encapsulate image-specific information. Furthermore, we developed a cross-modal similarity verification mechanism to quantify semantic consistency, effectively filtering out noise introduced during feature alignment. Even without manually annotated image captions, the refined descriptions alone suffice to construct the MMKG. Compared to conventional MMKGs construction paradigms, our approach achieves substantial storage efficiency gains while maintaining direct entity-to-image linkage capability. Experimental results on multimodal reasoning tasks demonstrate that LLMs augmented with VaLiK outperform previous state-of-the-art models. Our code is published at https://github.com/Wings-Of-Disaster/VaLiK.
When language and vision meet road safety: leveraging multimodal large language models for video-based traffic accident analysis
Jan 17, 2025



The increasing availability of traffic videos functioning on a 24/7/365 time scale has the great potential of increasing the spatio-temporal coverage of traffic accidents, which will help improve traffic safety. However, analyzing footage from hundreds, if not thousands, of traffic cameras in a 24/7/365 working protocol remains an extremely challenging task, as current vision-based approaches primarily focus on extracting raw information, such as vehicle trajectories or individual object detection, but require laborious post-processing to derive actionable insights. We propose SeeUnsafe, a new framework that integrates Multimodal Large Language Model (MLLM) agents to transform video-based traffic accident analysis from a traditional extraction-then-explanation workflow to a more interactive, conversational approach. This shift significantly enhances processing throughput by automating complex tasks like video classification and visual grounding, while improving adaptability by enabling seamless adjustments to diverse traffic scenarios and user-defined queries. Our framework employs a severity-based aggregation strategy to handle videos of various lengths and a novel multimodal prompt to generate structured responses for review and evaluation and enable fine-grained visual grounding. We introduce IMS (Information Matching Score), a new MLLM-based metric for aligning structured responses with ground truth. We conduct extensive experiments on the Toyota Woven Traffic Safety dataset, demonstrating that SeeUnsafe effectively performs accident-aware video classification and visual grounding by leveraging off-the-shelf MLLMs. Source code will be available at \url{https://github.com/ai4ce/SeeUnsafe}.
Real-time Accident Anticipation for Autonomous Driving Through Monocular Depth-Enhanced 3D Modeling
Sep 02, 2024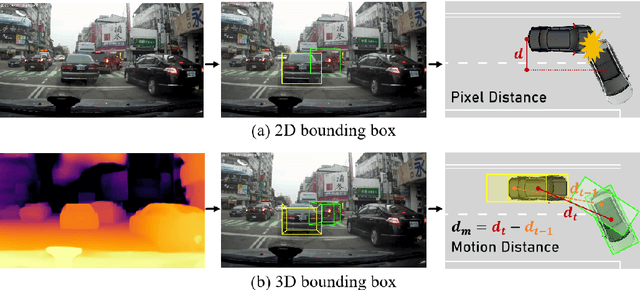
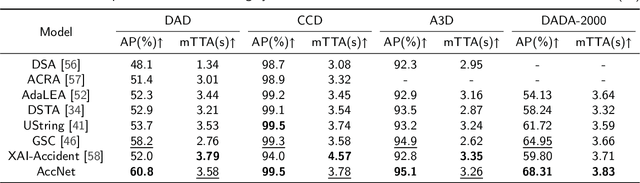
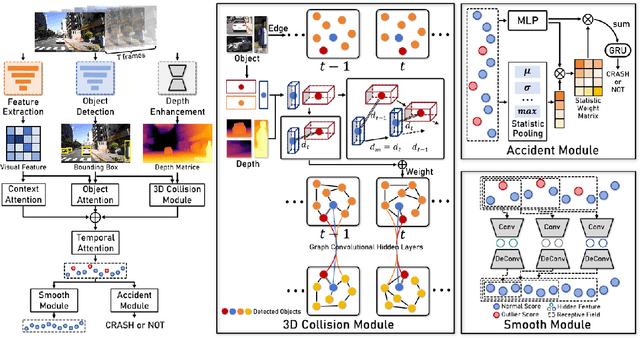
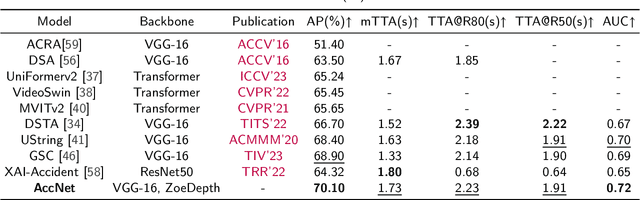
The primary goal of traffic accident anticipation is to foresee potential accidents in real time using dashcam videos, a task that is pivotal for enhancing the safety and reliability of autonomous driving technologies. In this study, we introduce an innovative framework, AccNet, which significantly advances the prediction capabilities beyond the current state-of-the-art (SOTA) 2D-based methods by incorporating monocular depth cues for sophisticated 3D scene modeling. Addressing the prevalent challenge of skewed data distribution in traffic accident datasets, we propose the Binary Adaptive Loss for Early Anticipation (BA-LEA). This novel loss function, together with a multi-task learning strategy, shifts the focus of the predictive model towards the critical moments preceding an accident. {We rigorously evaluate the performance of our framework on three benchmark datasets--Dashcam Accident Dataset (DAD), Car Crash Dataset (CCD), and AnAn Accident Detection (A3D), and DADA-2000 Dataset--demonstrating its superior predictive accuracy through key metrics such as Average Precision (AP) and mean Time-To-Accident (mTTA).
Multi-level Traffic-Responsive Tilt Camera Surveillance through Predictive Correlated Online Learning
Aug 05, 2024In urban traffic management, the primary challenge of dynamically and efficiently monitoring traffic conditions is compounded by the insufficient utilization of thousands of surveillance cameras along the intelligent transportation system. This paper introduces the multi-level Traffic-responsive Tilt Camera surveillance system (TTC-X), a novel framework designed for dynamic and efficient monitoring and management of traffic in urban networks. By leveraging widely deployed pan-tilt-cameras (PTCs), TTC-X overcomes the limitations of a fixed field of view in traditional surveillance systems by providing mobilized and 360-degree coverage. The innovation of TTC-X lies in the integration of advanced machine learning modules, including a detector-predictor-controller structure, with a novel Predictive Correlated Online Learning (PiCOL) methodology and the Spatial-Temporal Graph Predictor (STGP) for real-time traffic estimation and PTC control. The TTC-X is tested and evaluated under three experimental scenarios (e.g., maximum traffic flow capture, dynamic route planning, traffic state estimation) based on a simulation environment calibrated using real-world traffic data in Brooklyn, New York. The experimental results showed that TTC-X captured over 60\% total number of vehicles at the network level, dynamically adjusted its route recommendation in reaction to unexpected full-lane closure events, and reconstructed link-level traffic states with best MAE less than 1.25 vehicle/hour. Demonstrating scalability, cost-efficiency, and adaptability, TTC-X emerges as a powerful solution for urban traffic management in both cyber-physical and real-world environments.
Highly Efficient No-reference 4K Video Quality Assessment with Full-Pixel Covering Sampling and Training Strategy
Jul 30, 2024



Deep Video Quality Assessment (VQA) methods have shown impressive high-performance capabilities. Notably, no-reference (NR) VQA methods play a vital role in situations where obtaining reference videos is restricted or not feasible. Nevertheless, as more streaming videos are being created in ultra-high definition (e.g., 4K) to enrich viewers' experiences, the current deep VQA methods face unacceptable computational costs. Furthermore, the resizing, cropping, and local sampling techniques employed in these methods can compromise the details and content of original 4K videos, thereby negatively impacting quality assessment. In this paper, we propose a highly efficient and novel NR 4K VQA technology. Specifically, first, a novel data sampling and training strategy is proposed to tackle the problem of excessive resolution. This strategy allows the VQA Swin Transformer-based model to effectively train and make inferences using the full data of 4K videos on standard consumer-grade GPUs without compromising content or details. Second, a weighting and scoring scheme is developed to mimic the human subjective perception mode, which is achieved by considering the distinct impact of each sub-region within a 4K frame on the overall perception. Third, we incorporate the frequency domain information of video frames to better capture the details that affect video quality, consequently further improving the model's generalizability. To our knowledge, this is the first technology for the NR 4K VQA task. Thorough empirical studies demonstrate it not only significantly outperforms existing methods on a specialized 4K VQA dataset but also achieves state-of-the-art performance across multiple open-source NR video quality datasets.
Less is More: Efficient Brain-Inspired Learning for Autonomous Driving Trajectory Prediction
Jul 09, 2024Accurately and safely predicting the trajectories of surrounding vehicles is essential for fully realizing autonomous driving (AD). This paper presents the Human-Like Trajectory Prediction model (HLTP++), which emulates human cognitive processes to improve trajectory prediction in AD. HLTP++ incorporates a novel teacher-student knowledge distillation framework. The "teacher" model equipped with an adaptive visual sector, mimics the dynamic allocation of attention human drivers exhibit based on factors like spatial orientation, proximity, and driving speed. On the other hand, the "student" model focuses on real-time interaction and human decision-making, drawing parallels to the human memory storage mechanism. Furthermore, we improve the model's efficiency by introducing a new Fourier Adaptive Spike Neural Network (FA-SNN), allowing for faster and more precise predictions with fewer parameters. Evaluated using the NGSIM, HighD, and MoCAD benchmarks, HLTP++ demonstrates superior performance compared to existing models, which reduces the predicted trajectory error with over 11% on the NGSIM dataset and 25% on the HighD datasets. Moreover, HLTP++ demonstrates strong adaptability in challenging environments with incomplete input data. This marks a significant stride in the journey towards fully AD systems.
Informed along the road: roadway capacity driven graph convolution network for network-wide traffic prediction
Jun 18, 2024



While deep learning has shown success in predicting traffic states, most methods treat it as a general prediction task without considering transportation aspects. Recently, graph neural networks have proven effective for this task, but few incorporate external factors that impact roadway capacity and traffic flow. This study introduces the Roadway Capacity Driven Graph Convolution Network (RCDGCN) model, which incorporates static and dynamic roadway capacity attributes in spatio-temporal settings to predict network-wide traffic states. The model was evaluated on two real-world datasets with different transportation factors: the ICM-495 highway network and an urban network in Manhattan, New York City. Results show RCDGCN outperformed baseline methods in forecasting accuracy. Analyses, including ablation experiments, weight analysis, and case studies, investigated the effect of capacity-related factors. The study demonstrates the potential of using RCDGCN for transportation system management.
Traffic Prediction considering Multiple Levels of Spatial-temporal Information: A Multi-scale Graph Wavelet-based Approach
Jun 18, 2024Although traffic prediction has been receiving considerable attention with a number of successes in the context of intelligent transportation systems, the prediction of traffic states over a complex transportation network that contains different road types has remained a challenge. This study proposes a multi-scale graph wavelet temporal convolution network (MSGWTCN) to predict the traffic states in complex transportation networks. Specifically, a multi-scale spatial block is designed to simultaneously capture the spatial information at different levels, and the gated temporal convolution network is employed to extract the temporal dependencies of the data. The model jointly learns to mount multiple levels of the spatial interactions by stacking graph wavelets with different scales. Two real-world datasets are used in this study to investigate the model performance, including a highway network in Seattle and a dense road network of Manhattan in New York City. Experiment results show that the proposed model outperforms other baseline models. Furthermore, different scales of graph wavelets are found to be effective in extracting local, intermediate and global information at the same time and thus enable the model to learn a complex transportation network topology with various types of road segments. By carefully customizing the scales of wavelets, the model is able to improve the prediction performance and better adapt to different network configurations.