 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComposite Safety Potential Field for Highway Driving Risk Assessment
Apr 29, 2025In the era of rapid advancements in vehicle safety technologies, driving risk assessment has become a focal point of attention. Technologies such as collision warning systems, advanced driver assistance systems (ADAS), and autonomous driving require driving risks to be evaluated proactively and in real time. To be effective, driving risk assessment metrics must not only accurately identify potential collisions but also exhibit human-like reasoning to enable safe and seamless interactions between vehicles. Existing safety potential field models assess driving risks by considering both objective and subjective safety factors. However, their practical applicability in real-world risk assessment tasks is limited. These models are often challenging to calibrate due to the arbitrary nature of their structures, and calibration can be inefficient because of the scarcity of accident statistics. Additionally, they struggle to generalize across both longitudinal and lateral risks. To address these challenges, we propose a composite safety potential field framework, namely C-SPF, involving a subjective field to capture drivers' risk perception about spatial proximity and an objective field to quantify the imminent collision probability, to comprehensively evaluate driving risks. The C-SPF is calibrated using abundant two-dimensional spacing data from trajectory datasets, enabling it to effectively capture drivers' proximity risk perception and provide a more realistic explanation of driving behaviors. Analysis of a naturalistic driving dataset demonstrates that the C-SPF can capture both longitudinal and lateral risks that trigger drivers' safety maneuvers. Further case studies highlight the C-SPF's ability to explain lateral driver behaviors, such as abandoning lane changes or adjusting lateral position relative to adjacent vehicles, which are capabilities that existing models fail to achieve.
Traffic Adaptive Moving-window Service Patrolling for Real-time Incident Management during High-impact Events
Apr 15, 2025



This paper presents the Traffic Adaptive Moving-window Patrolling Algorithm (TAMPA), designed to improve real-time incident management during major events like sports tournaments and concerts. Such events significantly stress transportation networks, requiring efficient and adaptive patrol solutions. TAMPA integrates predictive traffic modeling and real-time complaint estimation, dynamically optimizing patrol deployment. Using dynamic programming, the algorithm continuously adjusts patrol strategies within short planning windows, effectively balancing immediate response and efficient routing. Leveraging the Dvoretzky-Kiefer-Wolfowitz inequality, TAMPA detects significant shifts in complaint patterns, triggering proactive adjustments in patrol routes. Theoretical analyses ensure performance remains closely aligned with optimal solutions. Simulation results from an urban traffic network demonstrate TAMPA's superior performance, showing improvements of approximately 87.5\% over stationary methods and 114.2\% over random strategies. Future work includes enhancing adaptability and incorporating digital twin technology for improved predictive accuracy, particularly relevant for events like the 2026 FIFA World Cup at MetLife Stadium.
When language and vision meet road safety: leveraging multimodal large language models for video-based traffic accident analysis
Jan 17, 2025



The increasing availability of traffic videos functioning on a 24/7/365 time scale has the great potential of increasing the spatio-temporal coverage of traffic accidents, which will help improve traffic safety. However, analyzing footage from hundreds, if not thousands, of traffic cameras in a 24/7/365 working protocol remains an extremely challenging task, as current vision-based approaches primarily focus on extracting raw information, such as vehicle trajectories or individual object detection, but require laborious post-processing to derive actionable insights. We propose SeeUnsafe, a new framework that integrates Multimodal Large Language Model (MLLM) agents to transform video-based traffic accident analysis from a traditional extraction-then-explanation workflow to a more interactive, conversational approach. This shift significantly enhances processing throughput by automating complex tasks like video classification and visual grounding, while improving adaptability by enabling seamless adjustments to diverse traffic scenarios and user-defined queries. Our framework employs a severity-based aggregation strategy to handle videos of various lengths and a novel multimodal prompt to generate structured responses for review and evaluation and enable fine-grained visual grounding. We introduce IMS (Information Matching Score), a new MLLM-based metric for aligning structured responses with ground truth. We conduct extensive experiments on the Toyota Woven Traffic Safety dataset, demonstrating that SeeUnsafe effectively performs accident-aware video classification and visual grounding by leveraging off-the-shelf MLLMs. Source code will be available at \url{https://github.com/ai4ce/SeeUnsafe}.
Multi-level Traffic-Responsive Tilt Camera Surveillance through Predictive Correlated Online Learning
Aug 05, 2024In urban traffic management, the primary challenge of dynamically and efficiently monitoring traffic conditions is compounded by the insufficient utilization of thousands of surveillance cameras along the intelligent transportation system. This paper introduces the multi-level Traffic-responsive Tilt Camera surveillance system (TTC-X), a novel framework designed for dynamic and efficient monitoring and management of traffic in urban networks. By leveraging widely deployed pan-tilt-cameras (PTCs), TTC-X overcomes the limitations of a fixed field of view in traditional surveillance systems by providing mobilized and 360-degree coverage. The innovation of TTC-X lies in the integration of advanced machine learning modules, including a detector-predictor-controller structure, with a novel Predictive Correlated Online Learning (PiCOL) methodology and the Spatial-Temporal Graph Predictor (STGP) for real-time traffic estimation and PTC control. The TTC-X is tested and evaluated under three experimental scenarios (e.g., maximum traffic flow capture, dynamic route planning, traffic state estimation) based on a simulation environment calibrated using real-world traffic data in Brooklyn, New York. The experimental results showed that TTC-X captured over 60\% total number of vehicles at the network level, dynamically adjusted its route recommendation in reaction to unexpected full-lane closure events, and reconstructed link-level traffic states with best MAE less than 1.25 vehicle/hour. Demonstrating scalability, cost-efficiency, and adaptability, TTC-X emerges as a powerful solution for urban traffic management in both cyber-physical and real-world environments.
Informed along the road: roadway capacity driven graph convolution network for network-wide traffic prediction
Jun 18, 2024



While deep learning has shown success in predicting traffic states, most methods treat it as a general prediction task without considering transportation aspects. Recently, graph neural networks have proven effective for this task, but few incorporate external factors that impact roadway capacity and traffic flow. This study introduces the Roadway Capacity Driven Graph Convolution Network (RCDGCN) model, which incorporates static and dynamic roadway capacity attributes in spatio-temporal settings to predict network-wide traffic states. The model was evaluated on two real-world datasets with different transportation factors: the ICM-495 highway network and an urban network in Manhattan, New York City. Results show RCDGCN outperformed baseline methods in forecasting accuracy. Analyses, including ablation experiments, weight analysis, and case studies, investigated the effect of capacity-related factors. The study demonstrates the potential of using RCDGCN for transportation system management.
Traffic Prediction considering Multiple Levels of Spatial-temporal Information: A Multi-scale Graph Wavelet-based Approach
Jun 18, 2024Although traffic prediction has been receiving considerable attention with a number of successes in the context of intelligent transportation systems, the prediction of traffic states over a complex transportation network that contains different road types has remained a challenge. This study proposes a multi-scale graph wavelet temporal convolution network (MSGWTCN) to predict the traffic states in complex transportation networks. Specifically, a multi-scale spatial block is designed to simultaneously capture the spatial information at different levels, and the gated temporal convolution network is employed to extract the temporal dependencies of the data. The model jointly learns to mount multiple levels of the spatial interactions by stacking graph wavelets with different scales. Two real-world datasets are used in this study to investigate the model performance, including a highway network in Seattle and a dense road network of Manhattan in New York City. Experiment results show that the proposed model outperforms other baseline models. Furthermore, different scales of graph wavelets are found to be effective in extracting local, intermediate and global information at the same time and thus enable the model to learn a complex transportation network topology with various types of road segments. By carefully customizing the scales of wavelets, the model is able to improve the prediction performance and better adapt to different network configurations.
Learning When to See for Long-term Traffic Data Collection on Power-constrained Devices
Jan 25, 2024



Collecting traffic data is crucial for transportation systems and urban planning, and is often more desirable through easy-to-deploy but power-constrained devices, due to the unavailability or high cost of power and network infrastructure. The limited power means an inevitable trade-off between data collection duration and accuracy/resolution. We introduce a novel learning-based framework that strategically decides observation timings for battery-powered devices and reconstructs the full data stream from sparsely sampled observations, resulting in minimal performance loss and a significantly prolonged system lifetime. Our framework comprises a predictor, a controller, and an estimator. The predictor utilizes historical data to forecast future trends within a fixed time horizon. The controller uses the forecasts to determine the next optimal timing for data collection. Finally, the estimator reconstructs the complete data profile from the sampled observations. We evaluate the performance of the proposed method on PeMS data by an RNN (Recurrent Neural Network) predictor and estimator, and a DRQN (Deep Recurrent Q-Network) controller, and compare it against the baseline that uses Kalman filter and uniform sampling. The results indicate that our method outperforms the baseline, primarily due to the inclusion of more representative data points in the profile, resulting in an overall 10\% improvement in estimation accuracy. Source code will be publicly available.
Physics-informed Machine Learning for Calibrating Macroscopic Traffic Flow Models
Jul 12, 2023



Well-calibrated traffic flow models are fundamental to understanding traffic phenomena and designing control strategies. Traditional calibration has been developed base on optimization methods. In this paper, we propose a novel physics-informed, learning-based calibration approach that achieves performances comparable to and even better than those of optimization-based methods. To this end, we combine the classical deep autoencoder, an unsupervised machine learning model consisting of one encoder and one decoder, with traffic flow models. Our approach informs the decoder of the physical traffic flow models and thus induces the encoder to yield reasonable traffic parameters given flow and speed measurements. We also introduce the denoising autoencoder into our method so that it can handles not only with normal data but also with corrupted data with missing values. We verified our approach with a case study of I-210 E in California.
Agent-based Simulation Model and Deep Learning Techniques to Evaluate and Predict Transportation Trends around COVID-19
Sep 23, 2020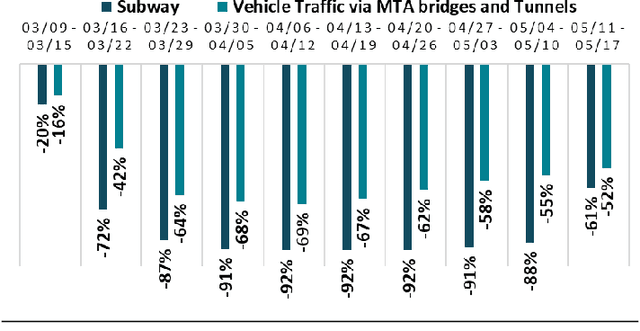
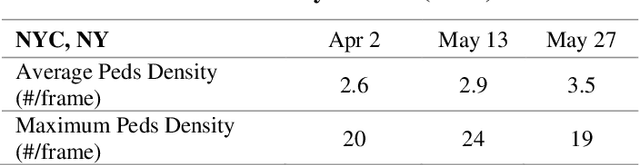
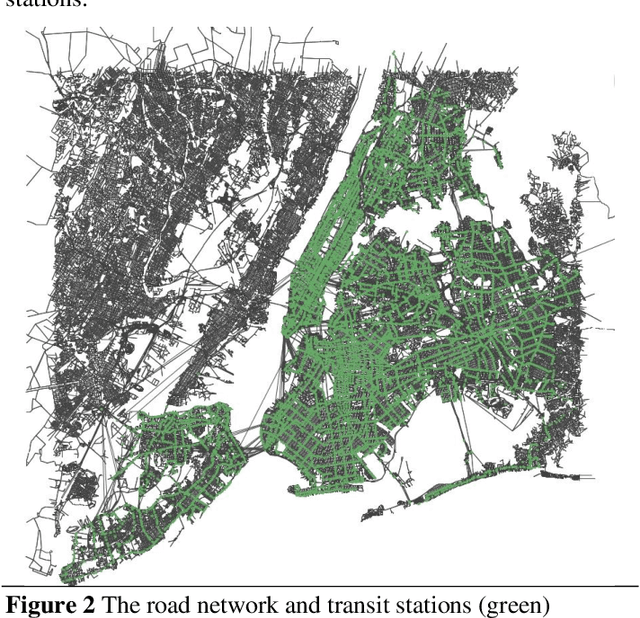
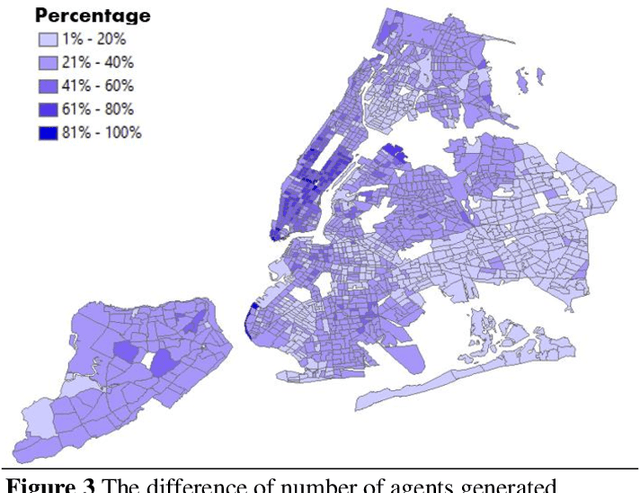
The COVID-19 pandemic has affected travel behaviors and transportation system operations, and cities are grappling with what policies can be effective for a phased reopening shaped by social distancing. This edition of the white paper updates travel trends and highlights an agent-based simulation model's results to predict the impact of proposed phased reopening strategies. It also introduces a real-time video processing method to measure social distancing through cameras on city streets.
Using LDA and LSTM Models to Study Public Opinions and Critical Groups Towards Congestion Pricing in New York City through 2007 to 2019
Aug 01, 2020
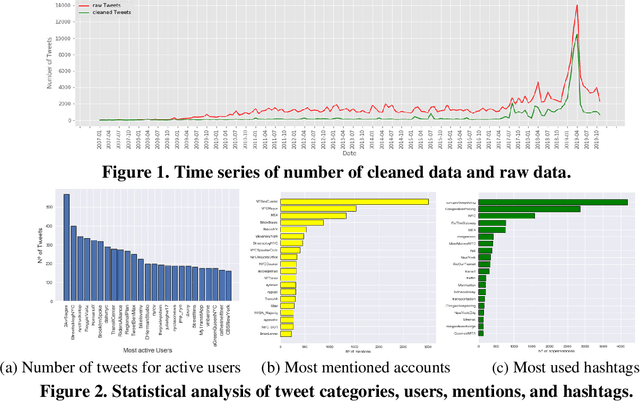
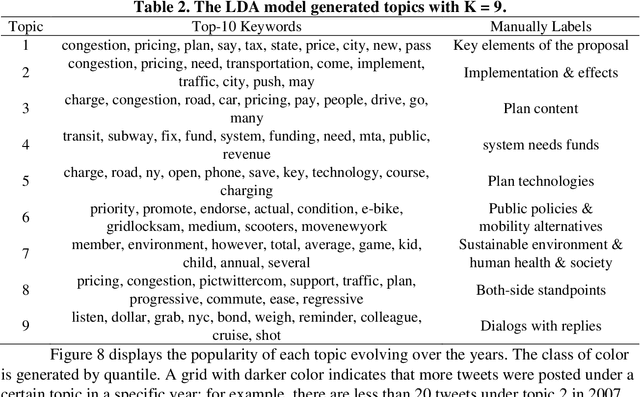
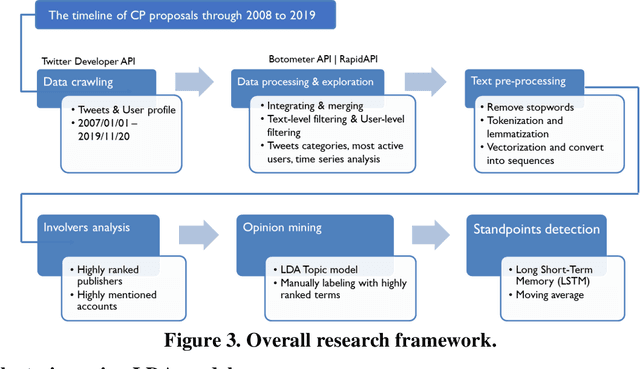
This study explores how people view and respond to the proposals of NYC congestion pricing evolve in time. To understand these responses, Twitter data is collected and analyzed. Critical groups in the recurrent process are detected by statistically analyzing the active users and the most mentioned accounts, and the trends of people's attitudes and concerns over the years are identified with text mining and hybrid Nature Language Processing techniques, including LDA topic modeling and LSTM sentiment classification. The result shows that multiple interest groups were involved and played crucial roles during the proposal, especially Mayor and Governor, MTA, and outer-borough representatives. The public shifted the concern of focus from the plan details to a wider city's sustainability and fairness. Furthermore, the plan's approval relies on several elements, the joint agreement reached in the political process, strong motivation in the real-world, the scheme based on balancing multiple interests, and groups' awareness of tolling's benefits and necessity.