 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Flexible Job Shop Scheduling with Random Job Arrivals
May 21, 2026The Flexible Job Shop Scheduling Problem (FJSP) is the optimal allocation of a set of jobs to machines. Two primary challenges persist in FJSP: the unpredictable arrival of future jobs and the combinatorial complexity of the problem, rendering it intractable for conventional mixed-integer linear programming solvers. This paper proposes an event-based \gls{DRL} approach to solve FJSP with random job arrivals. Specifically, we employ the Proximal Policy Optimization algorithm and use lightweight Multi-Layer Perceptrons to train the \gls{DRL} agent for minimizing the total completion time of all jobs. We design the state representation to be directly accessible from the environment, and limit the learning agent to selecting from among a set of well-established dispatching rules. Simulations show that our \gls{DRL} approach outperforms any of the individual dispatching rules on datasets with varying heterogeneity and job arrival rates. We benchmark our \gls{DRL} against an arrival-triggered mixed-integer linear programming solution and show that our method achieves good performance especially when the datasets are heterogeneous.
GRASS: Gradient-based Adaptive Layer-wise Importance Sampling for Memory-efficient Large Language Model Fine-tuning
Apr 09, 2026Full-parameter fine-tuning of large language models is constrained by substantial GPU memory requirements. Low-rank adaptation methods mitigate this challenge by updating only a subset of parameters. However, these approaches often limit model expressiveness and yield lower performance than full-parameter fine-tuning. Layer-wise fine-tuning methods have emerged as an alternative, enabling memory-efficient training through static layer importance sampling strategies. However, these methods overlook variations in layer importance across tasks and training stages, resulting in suboptimal performance on downstream tasks. To address these limitations, we propose GRASS, a gradient-based adaptive layer-wise importance sampling framework. GRASS utilizes mean gradient norms as a task-aware and training-stage-aware metric for estimating layer importance. Furthermore, GRASS adaptively adjusts layer sampling probabilities through an adaptive training strategy. We also introduce a layer-wise optimizer state offloading mechanism that overlaps computation and communication to further reduce memory usage while maintaining comparable training throughput. Extensive experiments across multiple models and benchmarks demonstrate that GRASS consistently outperforms state-of-the-art methods, achieving an average accuracy improvement of up to 4.38 points and reducing memory usage by up to 19.97\%.
How far have we gone in Generative Image Restoration? A study on its capability, limitations and evaluation practices
Mar 05, 2026Generative Image Restoration (GIR) has achieved impressive perceptual realism, but how far have its practical capabilities truly advanced compared with previous methods? To answer this, we present a large-scale study grounded in a new multi-dimensional evaluation pipeline that assesses models on detail, sharpness, semantic correctness, and overall quality. Our analysis covers diverse architectures, including diffusion-based, GAN-based, PSNR-oriented, and general-purpose generation models, revealing critical performance disparities. Furthermore, our analysis uncovers a key evolution in failure modes that signifies a paradigm shift for the perception-oriented low-level vision field. The central challenge is evolving from the previous problem of detail scarcity (under-generation) to the new frontier of detail quality and semantic control (preventing over-generation). We also leverage our benchmark to train a new IQA model that better aligns with human perceptual judgments. Ultimately, this work provides a systematic study of modern generative image restoration models, offering crucial insights that redefine our understanding of their true state and chart a course for future development.
SynergyKGC: Reconciling Topological Heterogeneity in Knowledge Graph Completion via Topology-Aware Synergy
Feb 11, 2026Knowledge Graph Completion (KGC) fundamentally hinges on the coherent fusion of pre-trained entity semantics with heterogeneous topological structures to facilitate robust relational reasoning. However, existing paradigms encounter a critical "structural resolution mismatch," failing to reconcile divergent representational demands across varying graph densities, which precipitates structural noise interference in dense clusters and catastrophic representation collapse in sparse regions. We present SynergyKGC, an adaptive framework that advances traditional neighbor aggregation to an active Cross-Modal Synergy Expert via relation-aware cross-attention and semantic-intent-driven gating. By coupling a density-dependent Identity Anchoring strategy with a Double-tower Coherent Consistency architecture, SynergyKGC effectively reconciles topological heterogeneity while ensuring representational stability across training and inference phases. Systematic evaluations on two public benchmarks validate the superiority of our method in significantly boosting KGC hit rates, providing empirical evidence for a generalized principle of resilient information integration in non-homogeneous structured data.
Robust Outlier Detection and Low-Latency Concept Drift Adaptation for Data Stream Regression: A Dual-Channel Architecture
Dec 13, 2025
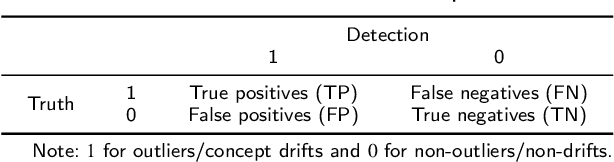
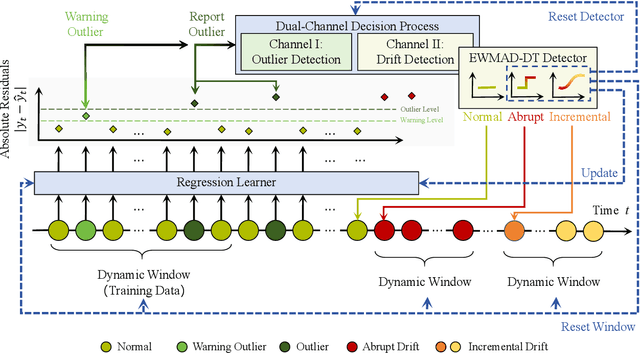
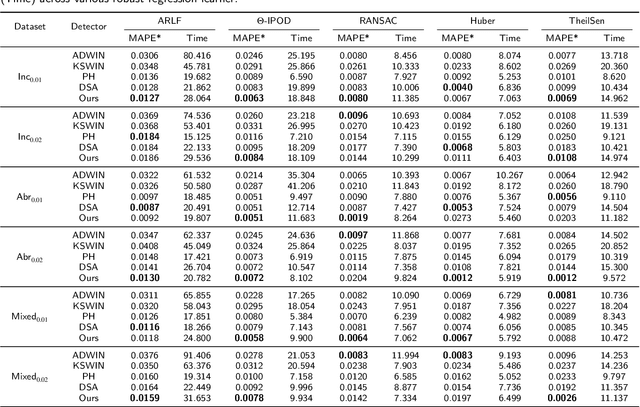
Outlier detection and concept drift detection represent two challenges in data analysis. Most studies address these issues separately. However, joint detection mechanisms in regression remain underexplored, where the continuous nature of output spaces makes distinguishing drifts from outliers inherently challenging. To address this, we propose a novel robust regression framework for joint outlier and concept drift detection. Specifically, we introduce a dual-channel decision process that orchestrates prediction residuals into two coupled logic flows: a rapid response channel for filtering point outliers and a deep analysis channel for diagnosing drifts. We further develop the Exponentially Weighted Moving Absolute Deviation with Distinguishable Types (EWMAD-DT) detector to autonomously differentiate between abrupt and incremental drifts via dynamic thresholding. Comprehensive experiments on both synthetic and real-world datasets demonstrate that our unified framework, enhanced by EWMAD-DT, exhibits superior detection performance even when point outliers and concept drifts coexist.
FailureAtlas:Mapping the Failure Landscape of T2I Models via Active Exploration
Sep 26, 2025Static benchmarks have provided a valuable foundation for comparing Text-to-Image (T2I) models. However, their passive design offers limited diagnostic power, struggling to uncover the full landscape of systematic failures or isolate their root causes. We argue for a complementary paradigm: active exploration. We introduce FailureAtlas, the first framework designed to autonomously explore and map the vast failure landscape of T2I models at scale. FailureAtlas frames error discovery as a structured search for minimal, failure-inducing concepts. While it is a computationally explosive problem, we make it tractable with novel acceleration techniques. When applied to Stable Diffusion models, our method uncovers hundreds of thousands of previously unknown error slices (over 247,000 in SD1.5 alone) and provides the first large-scale evidence linking these failures to data scarcity in the training set. By providing a principled and scalable engine for deep model auditing, FailureAtlas establishes a new, diagnostic-first methodology to guide the development of more robust generative AI. The code is available at https://github.com/cure-lab/FailureAtlas
Geo-ConvGRU: Geographically Masked Convolutional Gated Recurrent Unit for Bird-Eye View Segmentation
Dec 28, 2024Convolutional Neural Networks (CNNs) have significantly impacted various computer vision tasks, however, they inherently struggle to model long-range dependencies explicitly due to the localized nature of convolution operations. Although Transformers have addressed limitations in long-range dependencies for the spatial dimension, the temporal dimension remains underexplored. In this paper, we first highlight that 3D CNNs exhibit limitations in capturing long-range temporal dependencies. Though Transformers mitigate spatial dimension issues, they result in a considerable increase in parameter and processing speed reduction. To overcome these challenges, we introduce a simple yet effective module, Geographically Masked Convolutional Gated Recurrent Unit (Geo-ConvGRU), tailored for Bird's-Eye View segmentation. Specifically, we substitute the 3D CNN layers with ConvGRU in the temporal module to bolster the capacity of networks for handling temporal dependencies. Additionally, we integrate a geographical mask into the Convolutional Gated Recurrent Unit to suppress noise introduced by the temporal module. Comprehensive experiments conducted on the NuScenes dataset substantiate the merits of the proposed Geo-ConvGRU, revealing that our approach attains state-of-the-art performance in Bird's-Eye View segmentation.
Semi-Supervised Learning for Visual Bird's Eye View Semantic Segmentation
Aug 28, 2023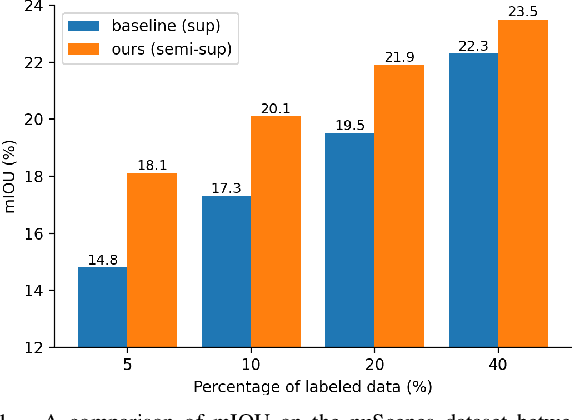
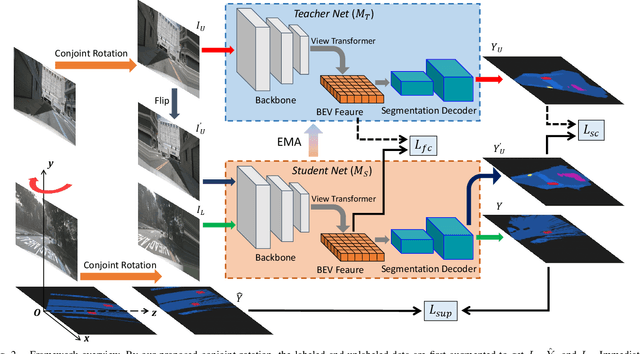
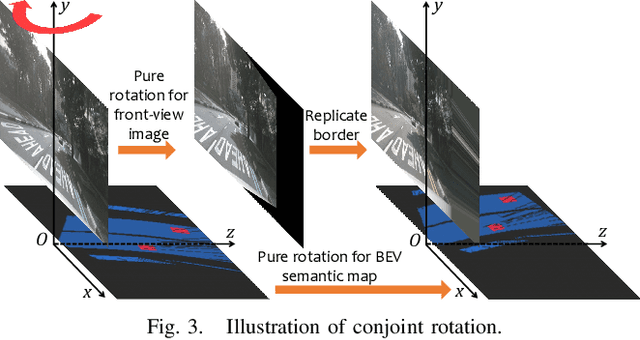
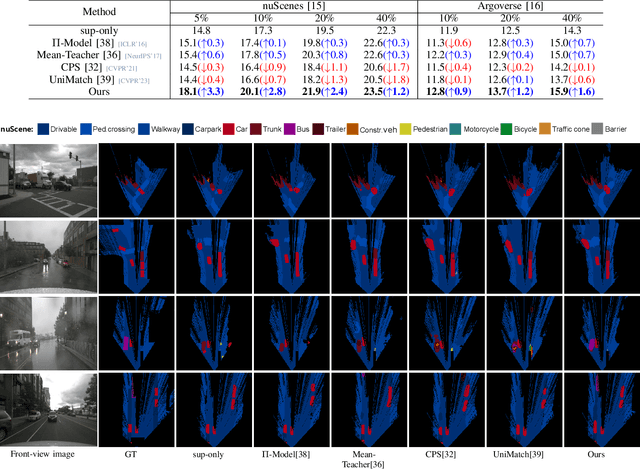
Visual bird's eye view (BEV) semantic segmentation helps autonomous vehicles understand the surrounding environment only from images, including static elements (e.g., roads) and dynamic elements (e.g., vehicles, pedestrians). However, the high cost of annotation procedures of full-supervised methods limits the capability of the visual BEV semantic segmentation, which usually needs HD maps, 3D object bounding boxes, and camera extrinsic matrixes. In this paper, we present a novel semi-supervised framework for visual BEV semantic segmentation to boost performance by exploiting unlabeled images during the training. A consistency loss that makes full use of unlabeled data is then proposed to constrain the model on not only semantic prediction but also the BEV feature. Furthermore, we propose a novel and effective data augmentation method named conjoint rotation which reasonably augments the dataset while maintaining the geometric relationship between the front-view images and the BEV semantic segmentation. Extensive experiments on the nuScenes and Argoverse datasets show that our semi-supervised framework can effectively improve prediction accuracy. To the best of our knowledge, this is the first work that explores improving visual BEV semantic segmentation performance using unlabeled data. The code will be publicly available.
Physics-informed Machine Learning for Calibrating Macroscopic Traffic Flow Models
Jul 12, 2023



Well-calibrated traffic flow models are fundamental to understanding traffic phenomena and designing control strategies. Traditional calibration has been developed base on optimization methods. In this paper, we propose a novel physics-informed, learning-based calibration approach that achieves performances comparable to and even better than those of optimization-based methods. To this end, we combine the classical deep autoencoder, an unsupervised machine learning model consisting of one encoder and one decoder, with traffic flow models. Our approach informs the decoder of the physical traffic flow models and thus induces the encoder to yield reasonable traffic parameters given flow and speed measurements. We also introduce the denoising autoencoder into our method so that it can handles not only with normal data but also with corrupted data with missing values. We verified our approach with a case study of I-210 E in California.
Geometric sliding mode control of mechanical systems on Lie groups
May 31, 2023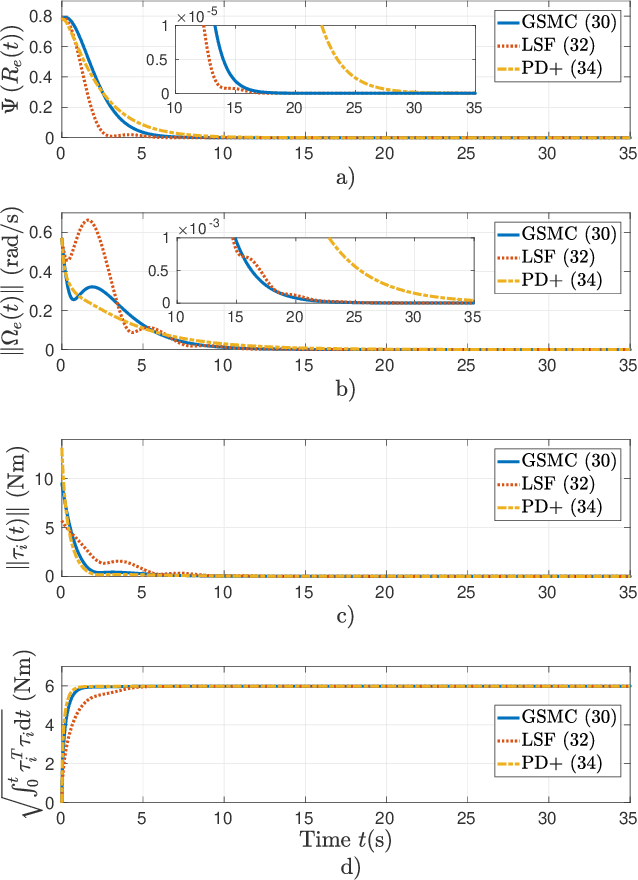
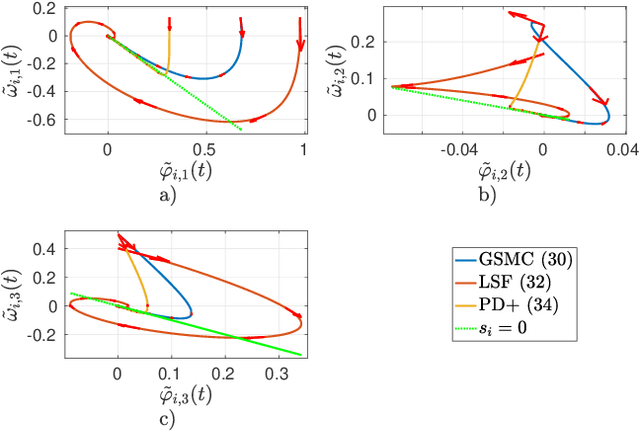
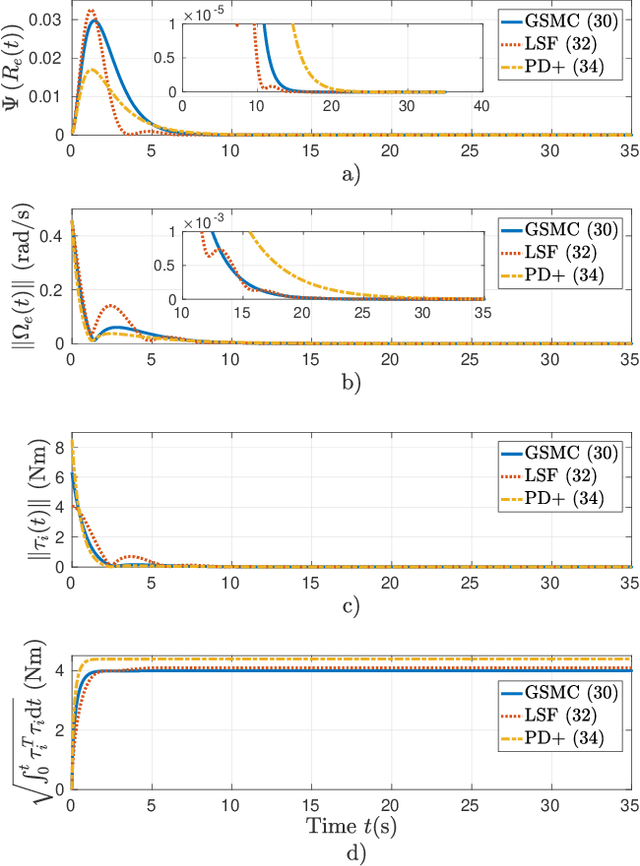
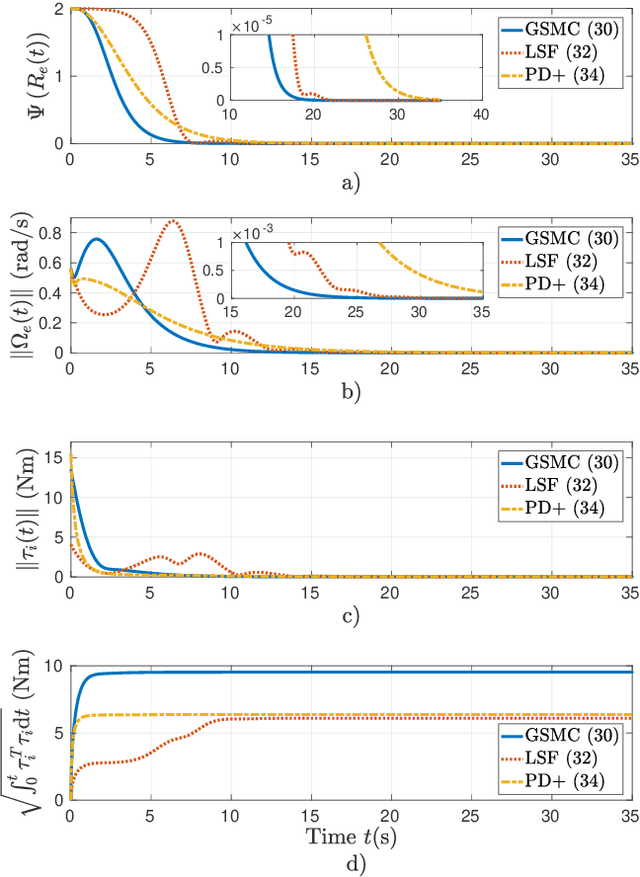
This paper presents a generalization of conventional sliding mode control designs for systems in Euclidean spaces to fully actuated simple mechanical systems whose configuration space is a Lie group for the trajectory-tracking problem. A generic kinematic control is first devised in the underlying Lie algebra, which enables the construction of a Lie group on the tangent bundle where the system state evolves. A sliding subgroup is then proposed on the tangent bundle with the desired sliding properties, and a control law is designed for the error dynamics trajectories to reach the sliding subgroup globally exponentially. Tracking control is then composed of the reaching law and sliding mode, and is applied for attitude tracking on the special orthogonal group SO(3) and the unit sphere S3. Numerical simulations show the performance of the proposed geometric sliding-mode controller (GSMC) in contrast with two control schemes of the literature.