 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric sliding mode control of mechanical systems on Lie groups
May 31, 2023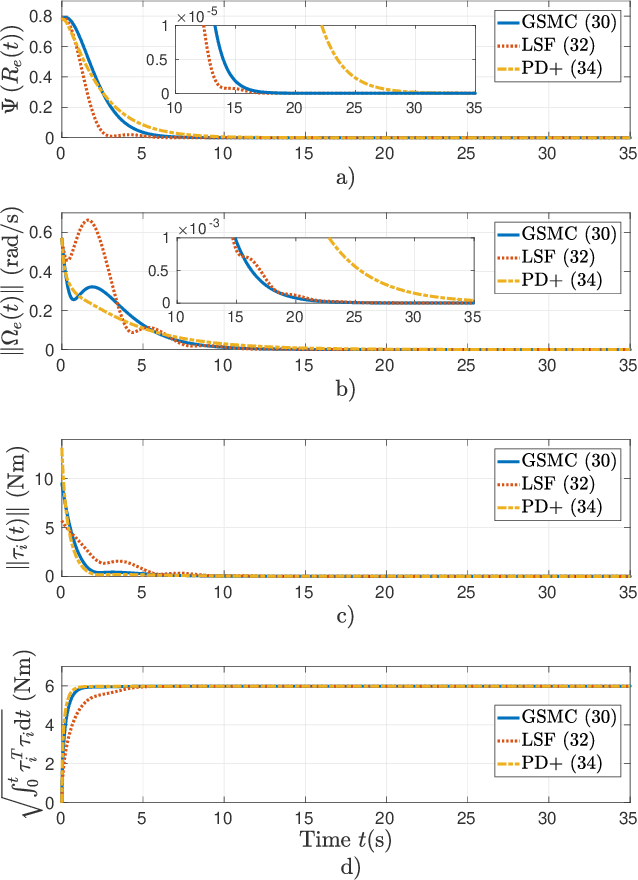
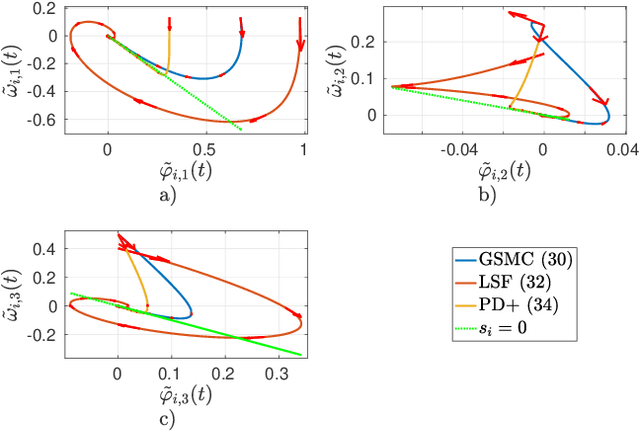
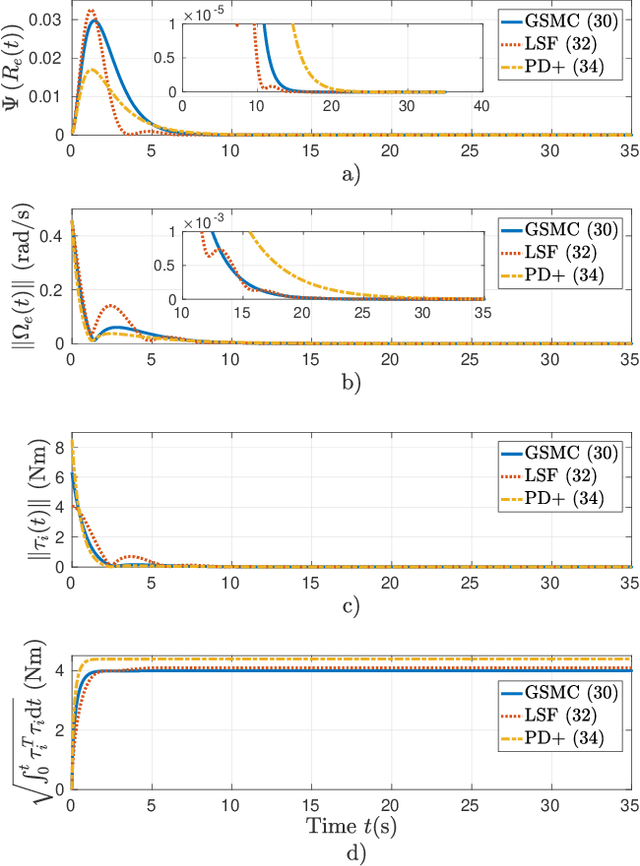
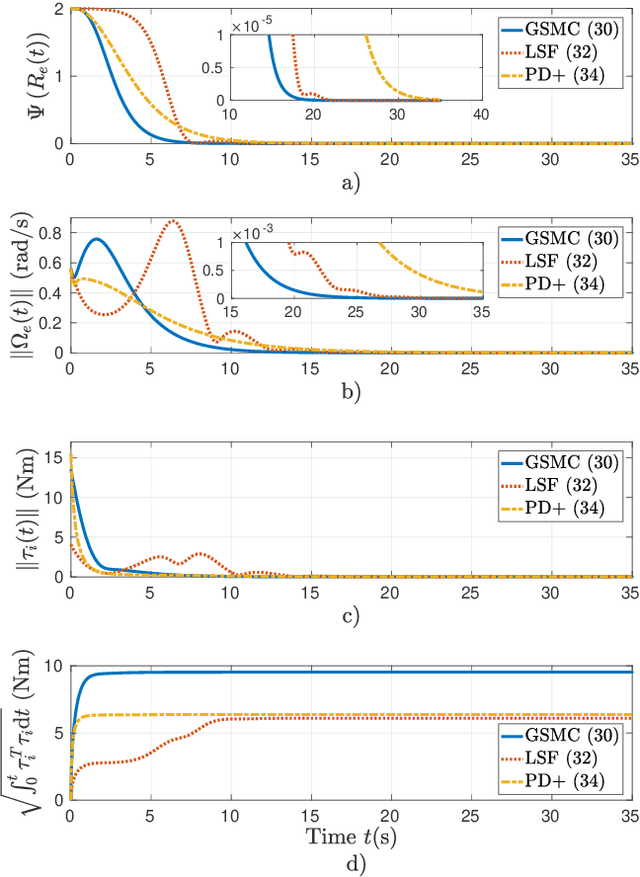
This paper presents a generalization of conventional sliding mode control designs for systems in Euclidean spaces to fully actuated simple mechanical systems whose configuration space is a Lie group for the trajectory-tracking problem. A generic kinematic control is first devised in the underlying Lie algebra, which enables the construction of a Lie group on the tangent bundle where the system state evolves. A sliding subgroup is then proposed on the tangent bundle with the desired sliding properties, and a control law is designed for the error dynamics trajectories to reach the sliding subgroup globally exponentially. Tracking control is then composed of the reaching law and sliding mode, and is applied for attitude tracking on the special orthogonal group SO(3) and the unit sphere S3. Numerical simulations show the performance of the proposed geometric sliding-mode controller (GSMC) in contrast with two control schemes of the literature.