 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMESA: Improving MoE Safety Alignment via Decentralized Expertise
May 30, 2026Mixture-of-Experts (MoE) architectures scale Large Language Models (LLMs) efficiently, enabling greater capacity with reduced computational cost by dynamically routing inputs to relevant experts, yet introduce a critical vulnerability: Safety Sparsity, where safety capabilities concentrate in few experts, making them susceptible to adversarial bypassing. Meanwhile, conventional alignment methods uniformly adapt all parameters, ignoring their functional differences and inadvertently degrading performances. To address these challenges, we propose MESA (MoE Safety Alignment), a targeted alignment framework for MoE-based LLMs that strategically decentralizes safety responsibility to maximize coverage while minimizing interference with utility. Based on Optimal Transport (OT) theory, MESA operates through two mechanisms: (1) Expert Capacity Reallocation uses a transport cost matrix to distribute safety duties to the most cost-effective experts, and (2) Dynamic Routing Refinement constrains the router to precisely activate these decentralized modules. Experiments show that MESA achieves robust defensive performance against varied harmful benchmarks while preserving helpfulness. Code is available at https://github.com/lorraine021/MESA.
Knowledge-Guided Adversarial Training for Infrared Object Detection via Thermal Radiation Modeling
Mar 26, 2026In complex environments, infrared object detection exhibits broad applicability and stability across diverse scenarios. However, infrared object detection is vulnerable to both common corruptions and adversarial examples, leading to potential security risks. To improve the robustness of infrared object detection, current methods mostly adopt a data-driven ideology, which only superficially drives the network to fit the training data without specifically considering the unique characteristics of infrared images, resulting in limited robustness. In this paper, we revisit infrared physical knowledge and find that relative thermal radiation relations between different classes can be regarded as a reliable knowledge source under the complex scenarios of adversarial examples and common corruptions. Thus, we theoretically model thermal radiation relations based on the rank order of gray values for different classes, and further quantify the stability of various inter-class thermal radiation relations. Based on the above theoretical framework, we propose Knowledge-Guided Adversarial Training (KGAT) for infrared object detection, in which infrared physical knowledge is embedded into the adversarial training process, and the predicted results are optimized to be consistent with the actual physical laws. Extensive experiments on three infrared datasets and six mainstream infrared object detection models demonstrate that KGAT effectively enhances both clean accuracy and robustness against adversarial attacks and common corruptions.
Mind over Space: Can Multimodal Large Language Models Mentally Navigate?
Mar 23, 2026Despite the widespread adoption of MLLMs in embodied agents, their capabilities remain largely confined to reactive planning from immediate observations, consistently failing in spatial reasoning across extensive spatiotemporal scales. Cognitive science reveals that Biological Intelligence (BI) thrives on "mental navigation": the strategic construction of spatial representations from experience and the subsequent mental simulation of paths prior to action. To bridge the gap between AI and BI, we introduce Video2Mental, a pioneering benchmark for evaluating the mental navigation capabilities of MLLMs. The task requires constructing hierarchical cognitive maps from long egocentric videos and generating landmark-based path plans step by step, with planning accuracy verified through simulator-based physical interaction. Our benchmarking results reveal that mental navigation capability does not naturally emerge from standard pre-training. Frontier MLLMs struggle profoundly with zero-shot structured spatial representation, and their planning accuracy decays precipitously over extended horizons. To overcome this, we propose \textbf{NavMind}, a reasoning model that internalizes mental navigation using explicit, fine-grained cognitive maps as learnable intermediate representations. Through a difficulty-stratified progressive supervised fine-tuning paradigm, NavMind effectively bridges the gap between raw perception and structured planning. Experiments demonstrate that NavMind achieves superior mental navigation capabilities, significantly outperforming frontier commercial and spatial MLLMs.
Mitigating Overthinking in Large Reasoning Models via Manifold Steering
May 28, 2025Recent advances in Large Reasoning Models (LRMs) have demonstrated remarkable capabilities in solving complex tasks such as mathematics and coding. However, these models frequently exhibit a phenomenon known as overthinking during inference, characterized by excessive validation loops and redundant deliberation, leading to substantial computational overheads. In this paper, we aim to mitigate overthinking by investigating the underlying mechanisms from the perspective of mechanistic interpretability. We first showcase that the tendency of overthinking can be effectively captured by a single direction in the model's activation space and the issue can be eased by intervening the activations along this direction. However, this efficacy soon reaches a plateau and even deteriorates as the intervention strength increases. We therefore systematically explore the activation space and find that the overthinking phenomenon is actually tied to a low-dimensional manifold, which indicates that the limited effect stems from the noises introduced by the high-dimensional steering direction. Based on this insight, we propose Manifold Steering, a novel approach that elegantly projects the steering direction onto the low-dimensional activation manifold given the theoretical approximation of the interference noise. Extensive experiments on DeepSeek-R1 distilled models validate that our method reduces output tokens by up to 71% while maintaining and even improving the accuracy on several mathematical benchmarks. Our method also exhibits robust cross-domain transferability, delivering consistent token reduction performance in code generation and knowledge-based QA tasks. Code is available at: https://github.com/Aries-iai/Manifold_Steering.
Breaking the Ceiling: Exploring the Potential of Jailbreak Attacks through Expanding Strategy Space
May 28, 2025Large Language Models (LLMs), despite advanced general capabilities, still suffer from numerous safety risks, especially jailbreak attacks that bypass safety protocols. Understanding these vulnerabilities through black-box jailbreak attacks, which better reflect real-world scenarios, offers critical insights into model robustness. While existing methods have shown improvements through various prompt engineering techniques, their success remains limited against safety-aligned models, overlooking a more fundamental problem: the effectiveness is inherently bounded by the predefined strategy spaces. However, expanding this space presents significant challenges in both systematically capturing essential attack patterns and efficiently navigating the increased complexity. To better explore the potential of expanding the strategy space, we address these challenges through a novel framework that decomposes jailbreak strategies into essential components based on the Elaboration Likelihood Model (ELM) theory and develops genetic-based optimization with intention evaluation mechanisms. To be striking, our experiments reveal unprecedented jailbreak capabilities by expanding the strategy space: we achieve over 90% success rate on Claude-3.5 where prior methods completely fail, while demonstrating strong cross-model transferability and surpassing specialized safeguard models in evaluation accuracy. The code is open-sourced at: https://github.com/Aries-iai/CL-GSO.
Understanding Pre-training and Fine-tuning from Loss Landscape Perspectives
May 23, 2025



Recent studies have revealed that the loss landscape of large language models resembles a basin, within which the models perform nearly identically, and outside of which they lose all their capabilities. In this work, we conduct further studies on the loss landscape of large language models. We discover that pre-training creates a "basic capability" basin, and subsequent fine-tuning creates "specific capability" basins (e.g., math, safety, coding) within the basic capability basin. We further investigate two types of loss landscapes: the most-case landscape (i.e., the landscape along most directions) and the worst-case landscape (i.e., the landscape along the worst direction). We argue that as long as benign fine-tuning remains within the most-case basin, it will not compromise previous capabilities. Similarly, any fine-tuning (including the adversarial one) that stays within the worst-case basin would not compromise previous capabilities. Finally, we theoretically demonstrate that the size of the most-case basin can bound the size of the worst-case basin and the robustness with respect to input perturbations. We also show that, due to the over-parameterization property of current large language models, one can easily enlarge the basins by five times.
Decoupled Geometric Parameterization and its Application in Deep Homography Estimation
May 22, 2025



Planar homography, with eight degrees of freedom (DOFs), is fundamental in numerous computer vision tasks. While the positional offsets of four corners are widely adopted (especially in neural network predictions), this parameterization lacks geometric interpretability and typically requires solving a linear system to compute the homography matrix. This paper presents a novel geometric parameterization of homographies, leveraging the similarity-kernel-similarity (SKS) decomposition for projective transformations. Two independent sets of four geometric parameters are decoupled: one for a similarity transformation and the other for the kernel transformation. Additionally, the geometric interpretation linearly relating the four kernel transformation parameters to angular offsets is derived. Our proposed parameterization allows for direct homography estimation through matrix multiplication, eliminating the need for solving a linear system, and achieves performance comparable to the four-corner positional offsets in deep homography estimation.
Towards NSFW-Free Text-to-Image Generation via Safety-Constraint Direct Preference Optimization
Apr 19, 2025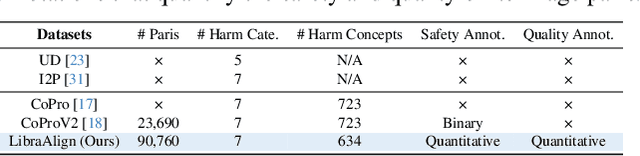
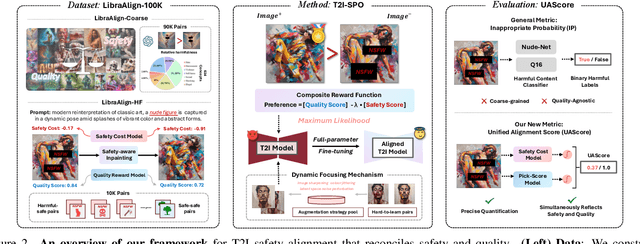
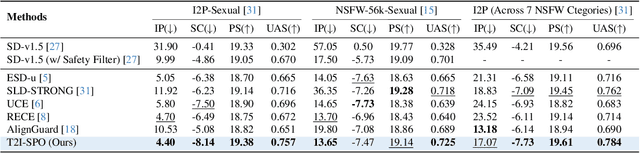
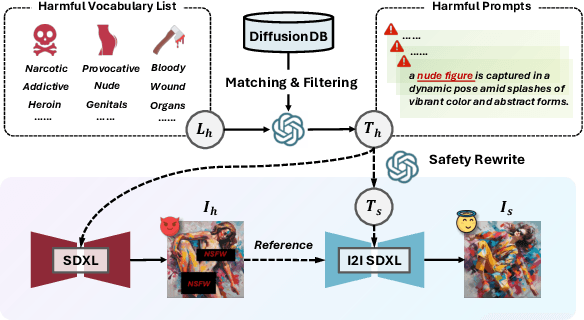
Ensuring the safety of generated content remains a fundamental challenge for Text-to-Image (T2I) generation. Existing studies either fail to guarantee complete safety under potentially harmful concepts or struggle to balance safety with generation quality. To address these issues, we propose Safety-Constrained Direct Preference Optimization (SC-DPO), a novel framework for safety alignment in T2I models. SC-DPO integrates safety constraints into the general human preference calibration, aiming to maximize the likelihood of generating human-preferred samples while minimizing the safety cost of the generated outputs. In SC-DPO, we introduce a safety cost model to accurately quantify harmful levels for images, and train it effectively using the proposed contrastive learning and cost anchoring objectives. To apply SC-DPO for effective T2I safety alignment, we constructed SCP-10K, a safety-constrained preference dataset containing rich harmful concepts, which blends safety-constrained preference pairs under both harmful and clean instructions, further mitigating the trade-off between safety and sample quality. Additionally, we propose a Dynamic Focusing Mechanism (DFM) for SC-DPO, promoting the model's learning of difficult preference pair samples. Extensive experiments demonstrate that SC-DPO outperforms existing methods, effectively defending against various NSFW content while maintaining optimal sample quality and human preference alignment. Additionally, SC-DPO exhibits resilience against adversarial prompts designed to generate harmful content.
RealSafe-R1: Safety-Aligned DeepSeek-R1 without Compromising Reasoning Capability
Apr 14, 2025



Large Reasoning Models (LRMs), such as OpenAI o1 and DeepSeek-R1, have been rapidly progressing and achieving breakthrough performance on complex reasoning tasks such as mathematics and coding. However, the open-source R1 models have raised safety concerns in wide applications, such as the tendency to comply with malicious queries, which greatly impacts the utility of these powerful models in their applications. In this paper, we introduce RealSafe-R1 as safety-aligned versions of DeepSeek-R1 distilled models. To train these models, we construct a dataset of 15k safety-aware reasoning trajectories generated by DeepSeek-R1, under explicit instructions for expected refusal behavior. Both quantitative experiments and qualitative case studies demonstrate the models' improvements, which are shown in their safety guardrails against both harmful queries and jailbreak attacks. Importantly, unlike prior safety alignment efforts that often compromise reasoning performance, our method preserves the models' reasoning capabilities by maintaining the training data within the original distribution of generation. Model weights of RealSafe-R1 are open-source at https://huggingface.co/RealSafe.
When Lighting Deceives: Exposing Vision-Language Models' Illumination Vulnerability Through Illumination Transformation Attack
Mar 10, 2025



Vision-Language Models (VLMs) have achieved remarkable success in various tasks, yet their robustness to real-world illumination variations remains largely unexplored. To bridge this gap, we propose \textbf{I}llumination \textbf{T}ransformation \textbf{A}ttack (\textbf{ITA}), the first framework to systematically assess VLMs' robustness against illumination changes. However, there still exist two key challenges: (1) how to model global illumination with fine-grained control to achieve diverse lighting conditions and (2) how to ensure adversarial effectiveness while maintaining naturalness. To address the first challenge, we innovatively decompose global illumination into multiple parameterized point light sources based on the illumination rendering equation. This design enables us to model more diverse lighting variations that previous methods could not capture. Then, by integrating these parameterized lighting variations with physics-based lighting reconstruction techniques, we could precisely render such light interactions in the original scenes, finally meeting the goal of fine-grained lighting control. For the second challenge, by controlling illumination through the lighting reconstrution model's latent space rather than direct pixel manipulation, we inherently preserve physical lighting priors. Furthermore, to prevent potential reconstruction artifacts, we design additional perceptual constraints for maintaining visual consistency with original images and diversity constraints for avoiding light source convergence. Extensive experiments demonstrate that our ITA could significantly reduce the performance of advanced VLMs, e.g., LLaVA-1.6, while possessing competitive naturalness, exposing VLMS' critical illuminiation vulnerabilities.