 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecurrent Cross-View Object Geo-Localization
Sep 16, 2025Cross-view object geo-localization (CVOGL) aims to determine the location of a specific object in high-resolution satellite imagery given a query image with a point prompt. Existing approaches treat CVOGL as a one-shot detection task, directly regressing object locations from cross-view information aggregation, but they are vulnerable to feature noise and lack mechanisms for error correction. In this paper, we propose ReCOT, a Recurrent Cross-view Object geo-localization Transformer, which reformulates CVOGL as a recurrent localization task. ReCOT introduces a set of learnable tokens that encode task-specific intent from the query image and prompt embeddings, and iteratively attend to the reference features to refine the predicted location. To enhance this recurrent process, we incorporate two complementary modules: (1) a SAM-based knowledge distillation strategy that transfers segmentation priors from the Segment Anything Model (SAM) to provide clearer semantic guidance without additional inference cost, and (2) a Reference Feature Enhancement Module (RFEM) that introduces a hierarchical attention to emphasize object-relevant regions in the reference features. Extensive experiments on standard CVOGL benchmarks demonstrate that ReCOT achieves state-of-the-art (SOTA) performance while reducing parameters by 60% compared to previous SOTA approaches.
S-BEVLoc: BEV-based Self-supervised Framework for Large-scale LiDAR Global Localization
Sep 11, 2025LiDAR-based global localization is an essential component of simultaneous localization and mapping (SLAM), which helps loop closure and re-localization. Current approaches rely on ground-truth poses obtained from GPS or SLAM odometry to supervise network training. Despite the great success of these supervised approaches, substantial cost and effort are required for high-precision ground-truth pose acquisition. In this work, we propose S-BEVLoc, a novel self-supervised framework based on bird's-eye view (BEV) for LiDAR global localization, which eliminates the need for ground-truth poses and is highly scalable. We construct training triplets from single BEV images by leveraging the known geographic distances between keypoint-centered BEV patches. Convolutional neural network (CNN) is used to extract local features, and NetVLAD is employed to aggregate global descriptors. Moreover, we introduce SoftCos loss to enhance learning from the generated triplets. Experimental results on the large-scale KITTI and NCLT datasets show that S-BEVLoc achieves state-of-the-art performance in place recognition, loop closure, and global localization tasks, while offering scalability that would require extra effort for supervised approaches.
EDFFDNet: Towards Accurate and Efficient Unsupervised Multi-Grid Image Registration
Sep 09, 2025Previous deep image registration methods that employ single homography, multi-grid homography, or thin-plate spline often struggle with real scenes containing depth disparities due to their inherent limitations. To address this, we propose an Exponential-Decay Free-Form Deformation Network (EDFFDNet), which employs free-form deformation with an exponential-decay basis function. This design achieves higher efficiency and performs well in scenes with depth disparities, benefiting from its inherent locality. We also introduce an Adaptive Sparse Motion Aggregator (ASMA), which replaces the MLP motion aggregator used in previous methods. By transforming dense interactions into sparse ones, ASMA reduces parameters and improves accuracy. Additionally, we propose a progressive correlation refinement strategy that leverages global-local correlation patterns for coarse-to-fine motion estimation, further enhancing efficiency and accuracy. Experiments demonstrate that EDFFDNet reduces parameters, memory, and total runtime by 70.5%, 32.6%, and 33.7%, respectively, while achieving a 0.5 dB PSNR gain over the state-of-the-art method. With an additional local refinement stage,EDFFDNet-2 further improves PSNR by 1.06 dB while maintaining lower computational costs. Our method also demonstrates strong generalization ability across datasets, outperforming previous deep learning methods.
Structure-Aware Radar-Camera Depth Estimation
Jun 05, 2025Monocular depth estimation aims to determine the depth of each pixel from an RGB image captured by a monocular camera. The development of deep learning has significantly advanced this field by facilitating the learning of depth features from some well-annotated datasets \cite{Geiger_Lenz_Stiller_Urtasun_2013,silberman2012indoor}. Eigen \textit{et al.} \cite{eigen2014depth} first introduce a multi-scale fusion network for depth regression. Following this, subsequent improvements have come from reinterpreting the regression task as a classification problem \cite{bhat2021adabins,Li_Wang_Liu_Jiang_2022}, incorporating additional priors \cite{shao2023nddepth,yang2023gedepth}, and developing more effective objective function \cite{xian2020structure,Yin_Liu_Shen_Yan_2019}. Despite these advances, generalizing to unseen domains remains a challenge. Recently, several methods have employed affine-invariant loss to enable multi-dataset joint training \cite{MiDaS,ZeroDepth,guizilini2023towards,Dany}. Among them, Depth Anything \cite{Dany} has shown leading performance in zero-shot monocular depth estimation. While it struggles to estimate accurate metric depth due to the lack of explicit depth cues, it excels at extracting structural information from unseen images, producing structure-detailed monocular depth.
Decoupled Geometric Parameterization and its Application in Deep Homography Estimation
May 22, 2025



Planar homography, with eight degrees of freedom (DOFs), is fundamental in numerous computer vision tasks. While the positional offsets of four corners are widely adopted (especially in neural network predictions), this parameterization lacks geometric interpretability and typically requires solving a linear system to compute the homography matrix. This paper presents a novel geometric parameterization of homographies, leveraging the similarity-kernel-similarity (SKS) decomposition for projective transformations. Two independent sets of four geometric parameters are decoupled: one for a similarity transformation and the other for the kernel transformation. Additionally, the geometric interpretation linearly relating the four kernel transformation parameters to angular offsets is derived. Our proposed parameterization allows for direct homography estimation through matrix multiplication, eliminating the need for solving a linear system, and achieves performance comparable to the four-corner positional offsets in deep homography estimation.
Language Driven Occupancy Prediction
Nov 25, 2024



We introduce LOcc, an effective and generalizable framework for open-vocabulary occupancy (OVO) prediction. Previous approaches typically supervise the networks through coarse voxel-to-text correspondences via image features as intermediates or noisy and sparse correspondences from voxel-based model-view projections. To alleviate the inaccurate supervision, we propose a semantic transitive labeling pipeline to generate dense and finegrained 3D language occupancy ground truth. Our pipeline presents a feasible way to dig into the valuable semantic information of images, transferring text labels from images to LiDAR point clouds and utimately to voxels, to establish precise voxel-to-text correspondences. By replacing the original prediction head of supervised occupancy models with a geometry head for binary occupancy states and a language head for language features, LOcc effectively uses the generated language ground truth to guide the learning of 3D language volume. Through extensive experiments, we demonstrate that our semantic transitive labeling pipeline can produce more accurate pseudo-labeled ground truth, diminishing labor-intensive human annotations. Additionally, we validate LOcc across various architectures, where all models consistently outperform state-ofthe-art zero-shot occupancy prediction approaches on the Occ3D-nuScenes dataset. Notably, even based on the simpler BEVDet model, with an input resolution of 256 * 704,Occ-BEVDet achieves an mIoU of 20.29, surpassing previous approaches that rely on temporal images, higher-resolution inputs, or larger backbone networks. The code for the proposed method is available at https://github.com/pkqbajng/LOcc.
RestorerID: Towards Tuning-Free Face Restoration with ID Preservation
Nov 21, 2024



Blind face restoration has made great progress in producing high-quality and lifelike images. Yet it remains challenging to preserve the ID information especially when the degradation is heavy. Current reference-guided face restoration approaches either require face alignment or personalized test-tuning, which are unfaithful or time-consuming. In this paper, we propose a tuning-free method named RestorerID that incorporates ID preservation during face restoration. RestorerID is a diffusion model-based method that restores low-quality images with varying levels of degradation by using a single reference image. To achieve this, we propose a unified framework to combine the ID injection with the base blind face restoration model. In addition, we design a novel Face ID Rebalancing Adapter (FIR-Adapter) to tackle the problems of content unconsistency and contours misalignment that are caused by information conflicts between the low-quality input and reference image. Furthermore, by employing an Adaptive ID-Scale Adjusting strategy, RestorerID can produce superior restored images across various levels of degradation. Experimental results on the Celeb-Ref dataset and real-world scenarios demonstrate that RestorerID effectively delivers high-quality face restoration with ID preservation, achieving a superior performance compared to the test-tuning approaches and other reference-guided ones. The code of RestorerID is available at \url{https://github.com/YingJiacheng/RestorerID}.
InterNet: Unsupervised Cross-modal Homography Estimation Based on Interleaved Modality Transfer and Self-supervised Homography Prediction
Sep 26, 2024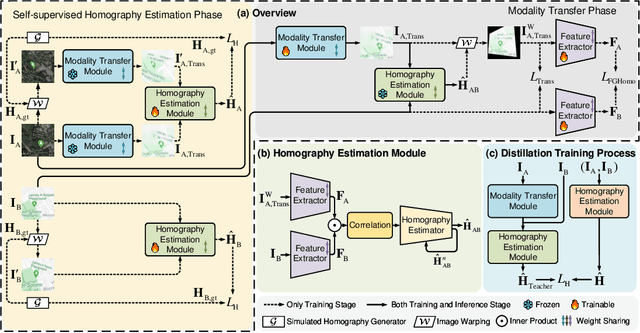
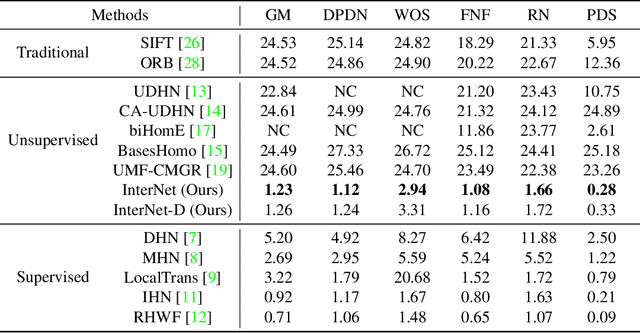
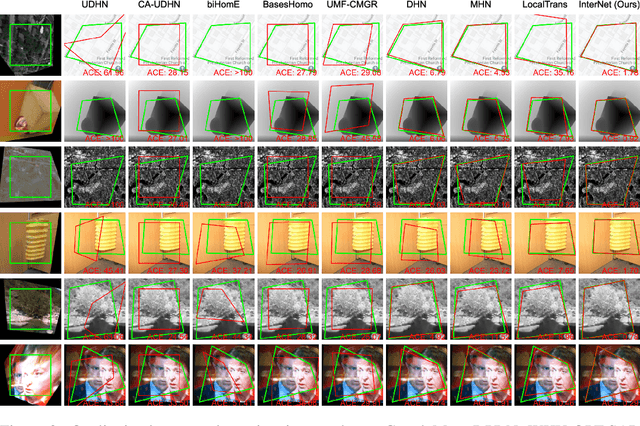
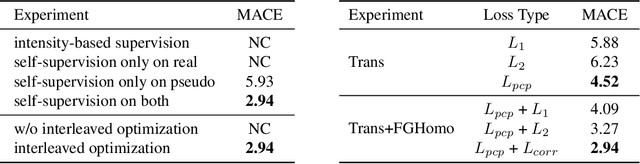
We propose a novel unsupervised cross-modal homography estimation framework, based on interleaved modality transfer and self-supervised homography prediction, named InterNet. InterNet integrates modality transfer and self-supervised homography estimation, introducing an innovative interleaved optimization framework to alternately promote both components. The modality transfer gradually narrows the modality gaps, facilitating the self-supervised homography estimation to fully leverage the synthetic intra-modal data. The self-supervised homography estimation progressively achieves reliable predictions, thereby providing robust cross-modal supervision for the modality transfer. To further boost the estimation accuracy, we also formulate a fine-grained homography feature loss to improve the connection between two components. Furthermore, we employ a simple yet effective distillation training technique to reduce model parameters and improve cross-domain generalization ability while maintaining comparable performance. Experiments reveal that InterNet achieves the state-of-the-art (SOTA) performance among unsupervised methods, and even outperforms many supervised methods such as MHN and LocalTrans.
SCPNet: Unsupervised Cross-modal Homography Estimation via Intra-modal Self-supervised Learning
Jul 11, 2024



We propose a novel unsupervised cross-modal homography estimation framework based on intra-modal Self-supervised learning, Correlation, and consistent feature map Projection, namely SCPNet. The concept of intra-modal self-supervised learning is first presented to facilitate the unsupervised cross-modal homography estimation. The correlation-based homography estimation network and the consistent feature map projection are combined to form the learnable architecture of SCPNet, boosting the unsupervised learning framework. SCPNet is the first to achieve effective unsupervised homography estimation on the satellite-map image pair cross-modal dataset, GoogleMap, under [-32,+32] offset on a 128x128 image, leading the supervised approach MHN by 14.0% of mean average corner error (MACE). We further conduct extensive experiments on several cross-modal/spectral and manually-made inconsistent datasets, on which SCPNet achieves the state-of-the-art (SOTA) performance among unsupervised approaches, and owns 49.0%, 25.2%, 36.4%, and 10.7% lower MACEs than the supervised approach MHN. Source code is available at https://github.com/RM-Zhang/SCPNet.
Rethinking Early-Fusion Strategies for Improved Multispectral Object Detection
May 25, 2024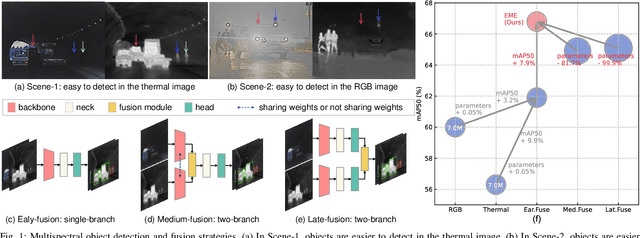
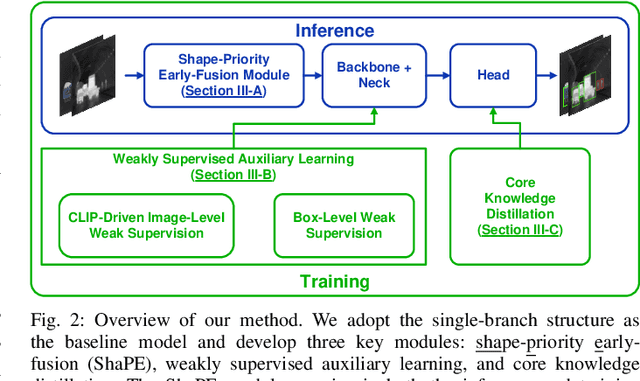

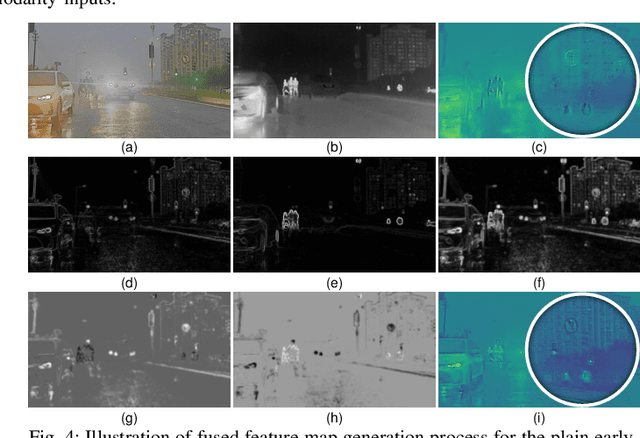
Most recent multispectral object detectors employ a two-branch structure to extract features from RGB and thermal images. While the two-branch structure achieves better performance than a single-branch structure, it overlooks inference efficiency. This conflict is increasingly aggressive, as recent works solely pursue higher performance rather than both performance and efficiency. In this paper, we address this issue by improving the performance of efficient single-branch structures. We revisit the reasons causing the performance gap between these structures. For the first time, we reveal the information interference problem in the naive early-fusion strategy adopted by previous single-branch structures. Besides, we find that the domain gap between multispectral images, and weak feature representation of the single-branch structure are also key obstacles for performance. Focusing on these three problems, we propose corresponding solutions, including a novel shape-priority early-fusion strategy, a weakly supervised learning method, and a core knowledge distillation technique. Experiments demonstrate that single-branch networks equipped with these three contributions achieve significant performance enhancements while retaining high efficiency. Our code will be available at \url{https://github.com/XueZ-phd/Efficient-RGB-T-Early-Fusion-Detection}.