 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Environment-Aware LAE: SAR as a Shared Sensing Infrastructure
Apr 13, 2026The rapid growth of the low-altitude economy (LAE) is making aerial systems an important part of future digital infrastructure. Although major advances have been achieved in unmanned aerial vehicle (UAV) platforms, communications, and autonomous control, environmental perception remains a key bottleneck to reliable and scalable LAE operations. Existing sensing modalities, such as optical, LiDAR, and millimeter-wave radar, are limited by visibility, sensing range, and environmental conditions, resulting in fragmented situational awareness. This article argues that addressing these limitations requires a shift from platform-centric sensing to a shared, environment-aware sensing infrastructure. In this context, synthetic aperture radar (SAR) offers a distinct advantage by enabling all-weather, wide-area perception. We show that SAR can support UAV operations through global environmental awareness, enhance task-level sensing, and enable cooperative sensing across satellites, high-altitude platforms, UAVs, and ground systems. Building on this perspective, we present a system-level view of SAR-enabled LAE, highlighting key transformations from fragmented to infrastructure-centric sensing, from reactive to predictive operation, and from device-centric to environment-aware networking. We further discuss enabling architectures, including multi-platform sensing hierarchies, integration with integrated sensing and communication (ISAC), and the role of artificial intelligence and digital twins, along with the key challenges toward real-world deployment. By positioning SAR as a shared sensing foundation rather than a standalone modality, this article provides new insights into the design of scalable, reliable, and intelligent LAE systems.
CRB-Based Resource Allocation in Multi-User Uplink Transmissions
Mar 17, 2026In this work, we study the design of receivers for uplink multi-user systems, aiming to estimate both the channel and the transmitted symbols. We consider two estimation strategies: (i) a joint estimation approach, where the channel and symbols are estimated simultaneously, and (ii) a sequential estimation approach, where the channel is first estimated and then used for symbol detection. For both strategies, we derive the Cramér-Rao Bound (CRB) for symbol estimation to characterize fundamental performance limits. When efficient receivers achieving the CRB exist, these bounds provide accurate lower bounds on the mutual information. In general, however, such receivers may not be available, and we instead use these same CRB-based metrics as practical proxies for achievable throughput. Leveraging tools from random matrix theory (RMT), we analyze the asymptotic behavior of these lower bounds under various asymptotic regimes for both estimation strategies. This analysis enables the derivation of generic power allocation guidelines that asymptotically maximize the proxy metrics. Simulation results confirm the accuracy of the asymptotic expressions and their effectiveness in guiding resource allocation decisions.
Ultra-Early Prediction of Tipping Points: Integrating Dynamical Measures with Reservoir Computing
Mar 16, 2026Complex dynamical systems-such as climate, ecosystems, and economics-can undergo catastrophic and potentially irreversible regime changes, often triggered by environmental parameter drift and stochastic disturbances. These critical thresholds, known as tipping points, pose a prediction problem of both theoretical and practical significance, yet remain largely unresolved. To address this, we articulate a model-free framework that integrates the measures characterizing the stability and sensitivity of dynamical systems with the reservoir computing (RC), a lightweight machine learning technique, using only observational time series data. The framework consists of two stages. The first stage involves using RC to robustly learn local complex dynamics from observational data segmented into windows. The second stage focuses on accurately detecting early warning signals of tipping points by analyzing the learned autonomous RC dynamics through dynamical measures, including the dominant eigenvalue of the Jacobian matrix, the maximum Floquet multiplier, and the maximum Lyapunov exponent. Furthermore, when these dynamical measures exhibit trend-like patterns, their extrapolation enables ultra-early prediction of tipping points significantly prior to the occurrence of critical transitions. We conduct a rigorous theoretical analysis of the proposed method and perform extensive numerical evaluations on a series of representative synthetic systems and eight real-world datasets, as well as quantitatively predict the tipping time of the Atlantic Meridional Overturning Circulation system. Experimental results demonstrate that our framework exhibits advantages over the baselines in comprehensive evaluations, particularly in terms of dynamical interpretability, prediction stability and robustness, and ultra-early prediction capability.
KDFlow: A User-Friendly and Efficient Knowledge Distillation Framework for Large Language Models
Mar 02, 2026Knowledge distillation (KD) is an essential technique to compress large language models (LLMs) into smaller ones. However, despite the distinct roles of the student model and the teacher model in KD, most existing frameworks still use a homogeneous training backend (e.g., FSDP and DeepSpeed) for both models, leading to suboptimal training efficiency. In this paper, we present a novel framework for LLM distillation, termed \textbf{KDFlow}, which features a decoupled architecture and employs SGLang for teacher inference. By bridging the training efficiency of FSDP2 and the inference efficiency of SGLang, KDFlow achieves full utilization of both advantages in a unified system. Moreover, instead of transferring full logits across different processes, our framework only transmits the teacher's hidden states using zero-copy data transfer and recomputes the logits on the student side, effectively balancing the communication cost and KD performance. Furthermore, our framework supports both off-policy and on-policy distillation and incorporates KD algorithms for cross-tokenizer KD through highly extensible and user-friendly APIs. Experiments show that KDFlow can achieve \textbf{1.44$\times$ to 6.36$\times$} speedup compared to current KD frameworks, enabling researchers to rapidly prototype and scale LLM distillation with minimal engineering overhead. Code is available at: https://github.com/songmzhang/KDFlow
Language-Coupled Reinforcement Learning for Multilingual Retrieval-Augmented Generation
Jan 21, 2026Multilingual retrieval-augmented generation (MRAG) requires models to effectively acquire and integrate beneficial external knowledge from multilingual collections. However, most existing studies employ a unitive process where queries of equivalent semantics across different languages are processed through a single-turn retrieval and subsequent optimization. Such a ``one-size-fits-all'' strategy is often suboptimal in multilingual settings, as the models occur to knowledge bias and conflict during the interaction with the search engine. To alleviate the issues, we propose LcRL, a multilingual search-augmented reinforcement learning framework that integrates a language-coupled Group Relative Policy Optimization into the policy and reward models. We adopt the language-coupled group sampling in the rollout module to reduce knowledge bias, and regularize an auxiliary anti-consistency penalty in the reward models to mitigate the knowledge conflict. Experimental results demonstrate that LcRL not only achieves competitive performance but is also appropriate for various practical scenarios such as constrained training data and retrieval over collections encompassing a large number of languages. Our code is available at https://github.com/Cherry-qwq/LcRL-Open.
Think Natively: Unlocking Multilingual Reasoning with Consistency-Enhanced Reinforcement Learning
Oct 08, 2025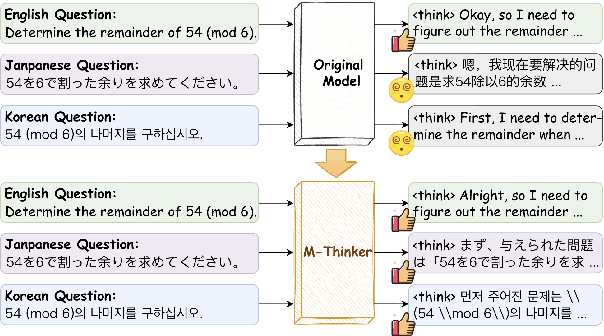
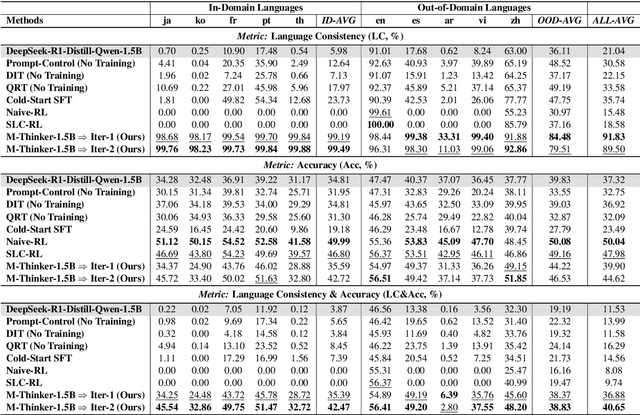
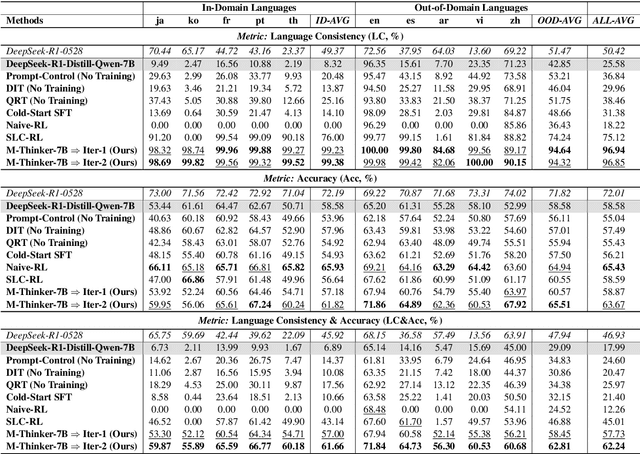
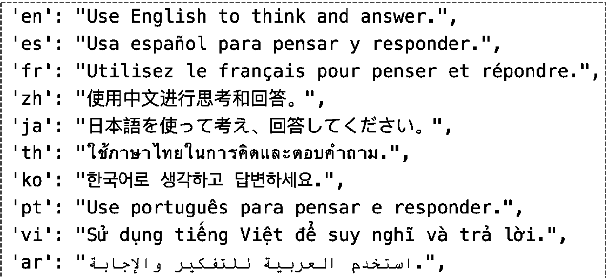
Large Reasoning Models (LRMs) have achieved remarkable performance on complex reasoning tasks by adopting the "think-then-answer" paradigm, which enhances both accuracy and interpretability. However, current LRMs exhibit two critical limitations when processing non-English languages: (1) They often struggle to maintain input-output language consistency; (2) They generally perform poorly with wrong reasoning paths and lower answer accuracy compared to English. These limitations significantly degrade the user experience for non-English speakers and hinder the global deployment of LRMs. To address these limitations, we propose M-Thinker, which is trained by the GRPO algorithm that involves a Language Consistency (LC) reward and a novel Cross-lingual Thinking Alignment (CTA) reward. Specifically, the LC reward defines a strict constraint on the language consistency between the input, thought, and answer. Besides, the CTA reward compares the model's non-English reasoning paths with its English reasoning path to transfer its own reasoning capability from English to non-English languages. Through an iterative RL procedure, our M-Thinker-1.5B/7B models not only achieve nearly 100% language consistency and superior performance on two multilingual benchmarks (MMATH and PolyMath), but also exhibit excellent generalization on out-of-domain languages.
CM-Align: Consistency-based Multilingual Alignment for Large Language Models
Sep 10, 2025Current large language models (LLMs) generally show a significant performance gap in alignment between English and other languages. To bridge this gap, existing research typically leverages the model's responses in English as a reference to select the best/worst responses in other languages, which are then used for Direct Preference Optimization (DPO) training. However, we argue that there are two limitations in the current methods that result in noisy multilingual preference data and further limited alignment performance: 1) Not all English responses are of high quality, and using a response with low quality may mislead the alignment for other languages. 2) Current methods usually use biased or heuristic approaches to construct multilingual preference pairs. To address these limitations, we design a consistency-based data selection method to construct high-quality multilingual preference data for improving multilingual alignment (CM-Align). Specifically, our method includes two parts: consistency-guided English reference selection and cross-lingual consistency-based multilingual preference data construction. Experimental results on three LLMs and three common tasks demonstrate the effectiveness and superiority of our method, which further indicates the necessity of constructing high-quality preference data.
Design of 3D Beamforming and Deployment Strategies for ISAC-based HAPS Systems
Jun 12, 2025This paper explores high-altitude platform station (HAPS) systems enabled by integrated sensing and communication (ISAC), in which a HAPS simultaneously transmits communication signals and synthetic aperture radar (SAR) imaging signals to support multi-user communication while performing ground target sensing. Taking into account the operational characteristics of SAR imaging, we consider two HAPS deployment strategies: (i) a quasi-stationary HAPS that remains fixed at an optimized location during SAR operation, following the stop-and-go scanning model; and (ii) a dynamic HAPS that continuously adjusts its flight trajectory along a circular path. For each strategy, we aim at maximizing the weighted sum-rate throughput for communication users while ensuring that SAR imaging requirements, such as beampattern gain and signal-to-noise ratio (SNR), are satisfied. This is achieved by jointly optimizing the HAPS deployment strategy, i.e., its placement or trajectory, along with three-dimensional (3D) transmit beamforming, under practical constraints including transmit power limits, energy consumption, and flight dynamics. Nevertheless, the formulated optimization problems corresponding to the two deployment strategies are inherently non-convex. To address the issue, we propose efficient algorithms that leverage both convex and non-convex optimization techniques to obtain high-quality suboptimal solutions. Numerical results demonstrate the effectiveness and advantages of the proposed approaches over benchmark schemes.
Less, but Better: Efficient Multilingual Expansion for LLMs via Layer-wise Mixture-of-Experts
May 28, 2025Continually expanding new languages for existing large language models (LLMs) is a promising yet challenging approach to building powerful multilingual LLMs. The biggest challenge is to make the model continuously learn new languages while preserving the proficient ability of old languages. To achieve this, recent work utilizes the Mixture-of-Experts (MoE) architecture to expand new languages by adding new experts and avoid catastrophic forgetting of old languages by routing corresponding tokens to the original model backbone (old experts). Although intuitive, this kind of method is parameter-costly when expanding new languages and still inevitably impacts the performance of old languages. To address these limitations, we analyze the language characteristics of different layers in LLMs and propose a layer-wise expert allocation algorithm (LayerMoE) to determine the appropriate number of new experts for each layer. Specifically, we find different layers in LLMs exhibit different representation similarities between languages and then utilize the similarity as the indicator to allocate experts for each layer, i.e., the higher similarity, the fewer experts. Additionally, to further mitigate the forgetting of old languages, we add a classifier in front of the router network on the layers with higher similarity to guide the routing of old language tokens. Experimental results show that our method outperforms the previous state-of-the-art baseline with 60% fewer experts in the single-expansion setting and with 33.3% fewer experts in the lifelong-expansion setting, demonstrating the effectiveness of our method.
A Dual-Space Framework for General Knowledge Distillation of Large Language Models
Apr 15, 2025Knowledge distillation (KD) is a promising solution to compress large language models (LLMs) by transferring their knowledge to smaller models. During this process, white-box KD methods usually minimize the distance between the output distributions of the teacher model and the student model to transfer more information. However, we reveal that the current white-box KD framework exhibits two limitations: a) bridging probability distributions from different output spaces will limit the similarity between the teacher model and the student model; b) this framework cannot be applied to LLMs with different vocabularies. One of the root causes for these limitations is that the distributions from the teacher and the student for KD are output by different prediction heads, which yield distributions in different output spaces and dimensions. Therefore, in this paper, we propose a dual-space knowledge distillation (DSKD) framework that unifies the prediction heads of the teacher and the student models for KD. Specifically, we first introduce two projectors with ideal initialization to project the teacher/student hidden states into the student/teacher representation spaces. After this, the hidden states from different models can share the same head and unify the output spaces of the distributions. Furthermore, we develop an exact token alignment (ETA) algorithm to align the same tokens in two differently-tokenized sequences. Based on the above, our DSKD framework is a general KD framework that supports both off-policy and on-policy KD, and KD between any two LLMs regardless of their vocabularies. Extensive experiments on instruction-following, mathematical reasoning, and code generation benchmarks show that DSKD significantly outperforms existing methods based on the current white-box KD framework and surpasses other cross-tokenizer KD methods for LLMs with different vocabularies.