 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonality Expression Across Contexts: Linguistic and Behavioral Variation in LLM Agents
Feb 01, 2026Large Language Models (LLMs) can be conditioned with explicit personality prompts, yet their behavioral realization often varies depending on context. This study examines how identical personality prompts lead to distinct linguistic, behavioral, and emotional outcomes across four conversational settings: ice-breaking, negotiation, group decision, and empathy tasks. Results show that contextual cues systematically influence both personality expression and emotional tone, suggesting that the same traits are expressed differently depending on social and affective demands. This raises an important question for LLM-based dialogue agents: whether such variations reflect inconsistency or context-sensitive adaptation akin to human behavior. Viewed through the lens of Whole Trait Theory, these findings highlight that LLMs exhibit context-sensitive rather than fixed personality expression, adapting flexibly to social interaction goals and affective conditions.
Knowledge vs. Experience: Asymptotic Limits of Impatience in Edge Tenants
Nov 14, 2025
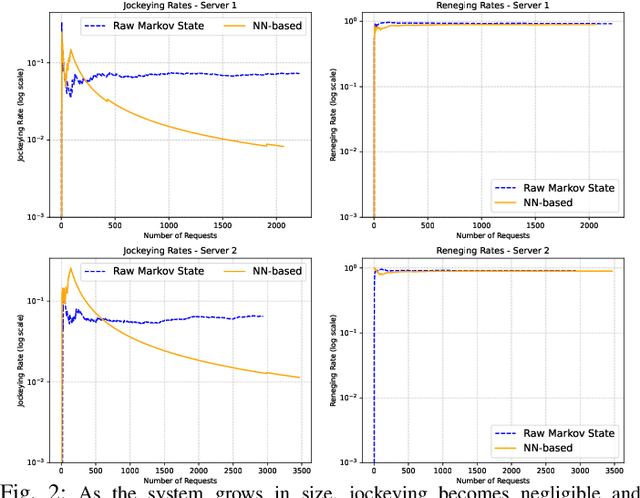
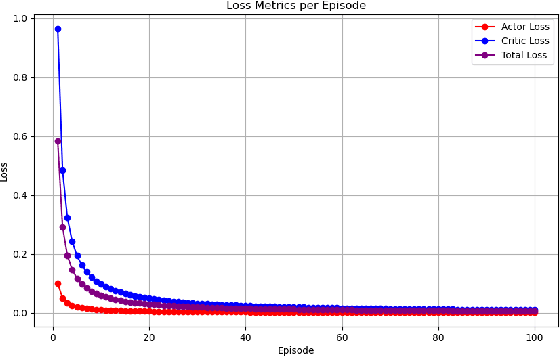
We study how two information feeds, a closed-form Markov estimator of residual sojourn and an online trained actor-critic, affect reneging and jockeying in a dual M/M/1 system. Analytically, for unequal service rates and total-time patience, we show that total wait grows linearly so abandonment is inevitable and the probability of a successful jockey vanishes as the backlog approaches towards infinity. Furthermore, under a mild sub-linear error condition both information models yield the same asymptotic limits (robustness). We empirically validate these limits and quantify finite backlog differences. Our findings show that learned and analytic feeds produce different delays, reneging rates and transient jockeying behavior at practical sizes, but converge to the same asymptotic outcome implied by our theory. The results characterize when value-of-information matters (finite regimes) and when it does not (asymptotics), informing lightweight telemetry and decision-logic design for low-cost, jockeying-aware systems.
Can Large Language Models Integrate Spatial Data? Empirical Insights into Reasoning Strengths and Computational Weaknesses
Aug 07, 2025



We explore the application of large language models (LLMs) to empower domain experts in integrating large, heterogeneous, and noisy urban spatial datasets. Traditional rule-based integration methods are unable to cover all edge cases, requiring manual verification and repair. Machine learning approaches require collecting and labeling of large numbers of task-specific samples. In this study, we investigate the potential of LLMs for spatial data integration. Our analysis first considers how LLMs reason about environmental spatial relationships mediated by human experience, such as between roads and sidewalks. We show that while LLMs exhibit spatial reasoning capabilities, they struggle to connect the macro-scale environment with the relevant computational geometry tasks, often producing logically incoherent responses. But when provided relevant features, thereby reducing dependence on spatial reasoning, LLMs are able to generate high-performing results. We then adapt a review-and-refine method, which proves remarkably effective in correcting erroneous initial responses while preserving accurate responses. We discuss practical implications of employing LLMs for spatial data integration in real-world contexts and outline future research directions, including post-training, multi-modal integration methods, and support for diverse data formats. Our findings position LLMs as a promising and flexible alternative to traditional rule-based heuristics, advancing the capabilities of adaptive spatial data integration.
Lightweight Node Selection in Hexagonal Grid Topology for TDoA-Based UAV Localization
Jun 17, 2025This paper investigates the optimization problem for TDoA-based UAV localization in low-altitude urban environments with hexagonal grid node deployment. We derive a lightweight optimized node selection strategy based on only RSSI measurements, to pre-select optimal nodes, avoiding extensive TDoA measurements in energy-constrained UAV scenarios. Theoretical and simulation results demonstrate that dynamically selecting the number of reference nodes improves localization performance while minimizing resource overhead.
Why Not Replace? Sustaining Long-Term Visual Localization via Handcrafted-Learned Feature Collaboration on CPU
May 24, 2025Robust long-term visual localization in complex industrial environments is critical for mobile robotic systems. Existing approaches face limitations: handcrafted features are illumination-sensitive, learned features are computationally intensive, and semantic- or marker-based methods are environmentally constrained. Handcrafted and learned features share similar representations but differ functionally. Handcrafted features are optimized for continuous tracking, while learned features excel in wide-baseline matching. Their complementarity calls for integration rather than replacement. Building on this, we propose a hierarchical localization framework. It leverages real-time handcrafted feature extraction for relative pose estimation. In parallel, it employs selective learned keypoint detection on optimized keyframes for absolute positioning. This design enables CPU-efficient, long-term visual localization. Experiments systematically progress through three validation phases: Initially establishing feature complementarity through comparative analysis, followed by computational latency profiling across algorithm stages on CPU platforms. Final evaluation under photometric variations (including seasonal transitions and diurnal cycles) demonstrates 47% average error reduction with significantly improved localization consistency. The code implementation is publicly available at https://github.com/linyicheng1/ORB_SLAM3_localization.
MMMG: a Comprehensive and Reliable Evaluation Suite for Multitask Multimodal Generation
May 23, 2025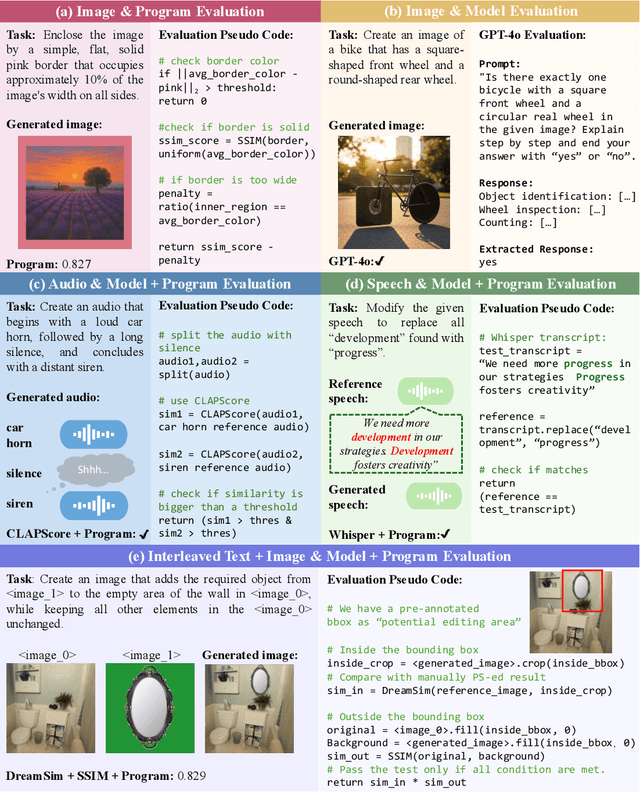
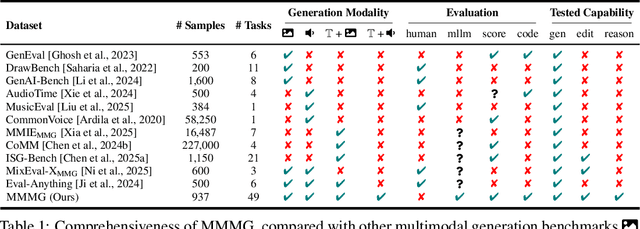
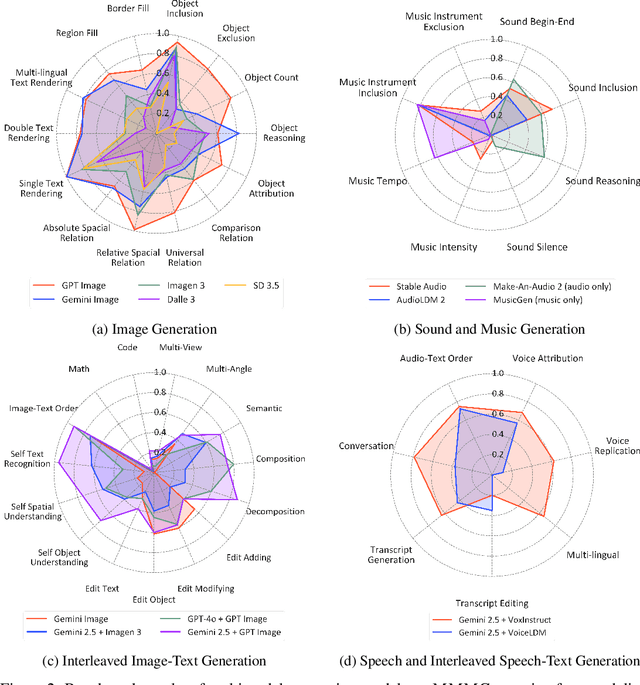
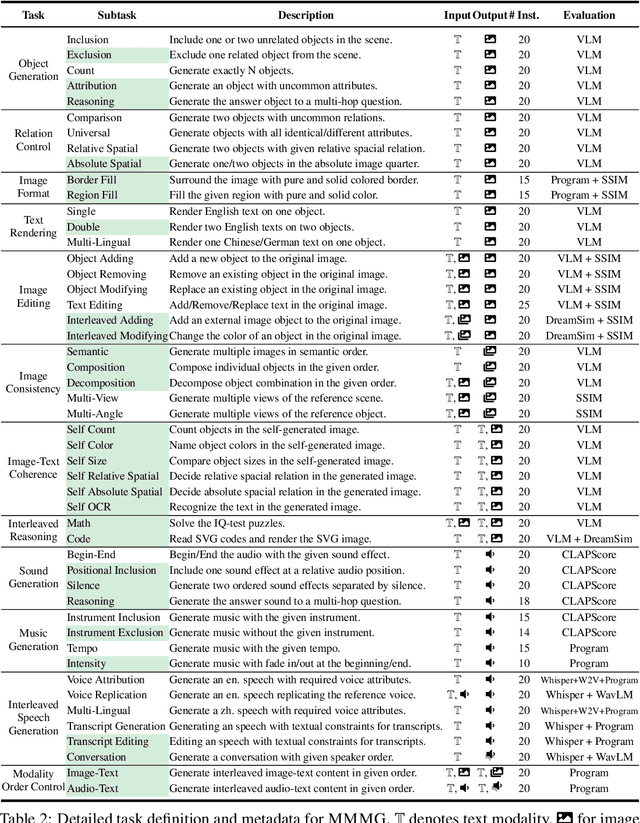
Automatically evaluating multimodal generation presents a significant challenge, as automated metrics often struggle to align reliably with human evaluation, especially for complex tasks that involve multiple modalities. To address this, we present MMMG, a comprehensive and human-aligned benchmark for multimodal generation across 4 modality combinations (image, audio, interleaved text and image, interleaved text and audio), with a focus on tasks that present significant challenges for generation models, while still enabling reliable automatic evaluation through a combination of models and programs. MMMG encompasses 49 tasks (including 29 newly developed ones), each with a carefully designed evaluation pipeline, and 937 instructions to systematically assess reasoning, controllability, and other key capabilities of multimodal generation models. Extensive validation demonstrates that MMMG is highly aligned with human evaluation, achieving an average agreement of 94.3%. Benchmarking results on 24 multimodal generation models reveal that even though the state-of-the-art model, GPT Image, achieves 78.3% accuracy for image generation, it falls short on multimodal reasoning and interleaved generation. Furthermore, results suggest considerable headroom for improvement in audio generation, highlighting an important direction for future research.
Fragments to Facts: Partial-Information Fragment Inference from LLMs
May 20, 2025Large language models (LLMs) can leak sensitive training data through memorization and membership inference attacks. Prior work has primarily focused on strong adversarial assumptions, including attacker access to entire samples or long, ordered prefixes, leaving open the question of how vulnerable LLMs are when adversaries have only partial, unordered sample information. For example, if an attacker knows a patient has "hypertension," under what conditions can they query a model fine-tuned on patient data to learn the patient also has "osteoarthritis?" In this paper, we introduce a more general threat model under this weaker assumption and show that fine-tuned LLMs are susceptible to these fragment-specific extraction attacks. To systematically investigate these attacks, we propose two data-blind methods: (1) a likelihood ratio attack inspired by methods from membership inference, and (2) a novel approach, PRISM, which regularizes the ratio by leveraging an external prior. Using examples from both medical and legal settings, we show that both methods are competitive with a data-aware baseline classifier that assumes access to labeled in-distribution data, underscoring their robustness.
How Cyclic Acoustic Patterns Influence ASMR Perception: A Signal Processing Perspective
Apr 02, 2025



Autonomous Sensory Meridian Response (ASMR) has been remarkably popular in the recent decade. While its effect has been validated through behavioral studies and neuro-physiological measurements such as electroencephalography (EEG) and related bio-signal analyses, its development and triggers remain a subject of debate. Previous studies suggest that its triggers are highly linked with cyclic patterns: predictable patterns introduce relaxation while variations maintain intrigue. To validate this and further understand the impact of acoustic features on ASMR effects, we designed three distinct cyclic patterns with monophonic and stereophonic variations, while controlling their predictability and randomness, and collected ASMR triggering scores through online surveys. Then, we extracted cyclic features and carried out regression analysis, seeking an explainable mapping of cyclic features and ASMR triggers. We found that relaxing effects accumulate progressively and are independent of spatial orientation. Cyclic patterns significantly influence psychological and physical effects, which remain invariant with time. Regression analysis revealed that smoothly spread and energy-dense cyclic patterns most effectively trigger ASMR responses.
Buyer-Initiated Auction Mechanism for Data Redemption in Machine Unlearning
Apr 01, 2025



The rapid growth of artificial intelligence (AI) has raised privacy concerns over user data, leading to regulations like the General Data Protection Regulation (GDPR) and the California Consumer Privacy Act (CCPA). With the essential toolbox provided by machine unlearning, AI service providers are now able to remove user data from their trained models as well as the training datasets, so as to comply with such regulations. However, extensive data redemption can be costly and degrade model accuracy. To balance the cost of unlearning and the privacy protection, we propose a buyer-initiated auction mechanism for data redemption, enabling the service provider to purchase data from willing users with appropriate compensation. This approach does not require the server to have any a priori knowledge about the users' privacy preference, and provides an efficient solution for maximizing the social welfare in the investigated problem.
Quantum Machine Learning in Log-based Anomaly Detection: Challenges and Opportunities
Dec 18, 2024Log-based anomaly detection (LogAD) is the main component of Artificial Intelligence for IT Operations (AIOps), which can detect anomalous that occur during the system on-the-fly. Existing methods commonly extract log sequence features using classical machine learning techniques to identify whether a new sequence is an anomaly or not. However, these classical approaches often require trade-offs between efficiency and accuracy. The advent of quantum machine learning (QML) offers a promising alternative. By transforming parts of classical machine learning computations into parameterized quantum circuits (PQCs), QML can significantly reduce the number of trainable parameters while maintaining accuracy comparable to classical counterparts. In this work, we introduce a unified framework, \ourframework{}, for evaluating QML models in the context of LogAD. This framework incorporates diverse log data, integrated QML models, and comprehensive evaluation metrics. State-of-the-art methods such as DeepLog, LogAnomaly, and LogRobust, along with their quantum-transformed counterparts, are included in our framework.Beyond standard metrics like F1 score, precision, and recall, our evaluation extends to factors critical to QML performance, such as specificity, the number of circuits, circuit design, and quantum state encoding. Using \ourframework{}, we conduct extensive experiments to assess the performance of these models and their quantum counterparts, uncovering valuable insights and paving the way for future research in QML model selection and design for LogAD.