 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing for the Shortest Path in Denoising Diffusion Model
Mar 06, 2025In this research, we propose a novel denoising diffusion model based on shortest-path modeling that optimizes residual propagation to enhance both denoising efficiency and quality. Drawing on Denoising Diffusion Implicit Models (DDIM) and insights from graph theory, our model, termed the Shortest Path Diffusion Model (ShortDF), treats the denoising process as a shortest-path problem aimed at minimizing reconstruction error. By optimizing the initial residuals, we improve the efficiency of the reverse diffusion process and the quality of the generated samples. Extensive experiments on multiple standard benchmarks demonstrate that ShortDF significantly reduces diffusion time (or steps) while enhancing the visual fidelity of generated samples compared to prior arts. This work, we suppose, paves the way for interactive diffusion-based applications and establishes a foundation for rapid data generation. Code is available at https://github.com/UnicomAI/ShortDF
SEE: See Everything Every Time -- Adaptive Brightness Adjustment for Broad Light Range Images via Events
Feb 28, 2025Event cameras, with a high dynamic range exceeding $120dB$, significantly outperform traditional embedded cameras, robustly recording detailed changing information under various lighting conditions, including both low- and high-light situations. However, recent research on utilizing event data has primarily focused on low-light image enhancement, neglecting image enhancement and brightness adjustment across a broader range of lighting conditions, such as normal or high illumination. Based on this, we propose a novel research question: how to employ events to enhance and adaptively adjust the brightness of images captured under broad lighting conditions? To investigate this question, we first collected a new dataset, SEE-600K, consisting of 610,126 images and corresponding events across 202 scenarios, each featuring an average of four lighting conditions with over a 1000-fold variation in illumination. Subsequently, we propose a framework that effectively utilizes events to smoothly adjust image brightness through the use of prompts. Our framework captures color through sensor patterns, uses cross-attention to model events as a brightness dictionary, and adjusts the image's dynamic range to form a broad light-range representation (BLR), which is then decoded at the pixel level based on the brightness prompt. Experimental results demonstrate that our method not only performs well on the low-light enhancement dataset but also shows robust performance on broader light-range image enhancement using the SEE-600K dataset. Additionally, our approach enables pixel-level brightness adjustment, providing flexibility for post-processing and inspiring more imaging applications. The dataset and source code are publicly available at:https://github.com/yunfanLu/SEE.
Integral Fast Fourier Color Constancy
Feb 05, 2025
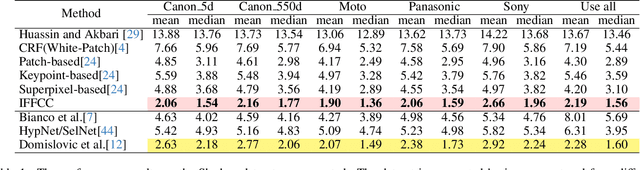
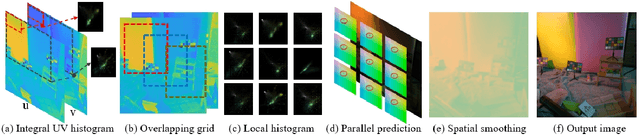

Traditional auto white balance (AWB) algorithms typically assume a single global illuminant source, which leads to color distortions in multi-illuminant scenes. While recent neural network-based methods have shown excellent accuracy in such scenarios, their high parameter count and computational demands limit their practicality for real-time video applications. The Fast Fourier Color Constancy (FFCC) algorithm was proposed for single-illuminant-source scenes, predicting a global illuminant source with high efficiency. However, it cannot be directly applied to multi-illuminant scenarios unless specifically modified. To address this, we propose Integral Fast Fourier Color Constancy (IFFCC), an extension of FFCC tailored for multi-illuminant scenes. IFFCC leverages the proposed integral UV histogram to accelerate histogram computations across all possible regions in Cartesian space and parallelizes Fourier-based convolution operations, resulting in a spatially-smooth illumination map. This approach enables high-accuracy, real-time AWB in multi-illuminant scenes. Extensive experiments show that IFFCC achieves accuracy that is on par with or surpasses that of pixel-level neural networks, while reducing the parameter count by over $400\times$ and processing speed by 20 - $100\times$ faster than network-based approaches.
RGB-Event ISP: The Dataset and Benchmark
Jan 31, 2025



Event-guided imaging has received significant attention due to its potential to revolutionize instant imaging systems. However, the prior methods primarily focus on enhancing RGB images in a post-processing manner, neglecting the challenges of image signal processor (ISP) dealing with event sensor and the benefits events provide for reforming the ISP process. To achieve this, we conduct the first research on event-guided ISP. First, we present a new event-RAW paired dataset, collected with a novel but still confidential sensor that records pixel-level aligned events and RAW images. This dataset includes 3373 RAW images with 2248 x 3264 resolution and their corresponding events, spanning 24 scenes with 3 exposure modes and 3 lenses. Second, we propose a conventional ISP pipeline to generate good RGB frames as reference. This conventional ISP pipleline performs basic ISP operations, e.g.demosaicing, white balancing, denoising and color space transforming, with a ColorChecker as reference. Third, we classify the existing learnable ISP methods into 3 classes, and select multiple methods to train and evaluate on our new dataset. Lastly, since there is no prior work for reference, we propose a simple event-guided ISP method and test it on our dataset. We further put forward key technical challenges and future directions in RGB-Event ISP. In summary, to the best of our knowledge, this is the very first research focusing on event-guided ISP, and we hope it will inspire the community. The code and dataset are available at: https://github.com/yunfanLu/RGB-Event-ISP.
Learning Triangular Distribution in Visual World
Dec 04, 2023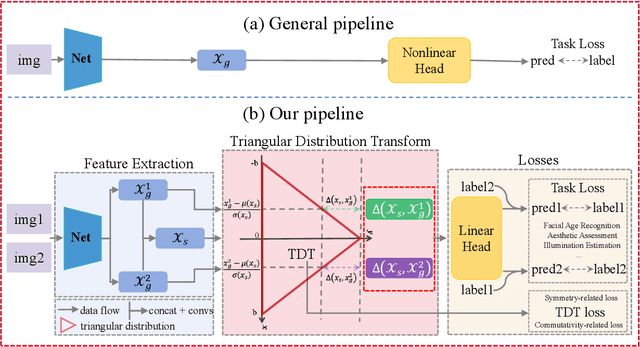

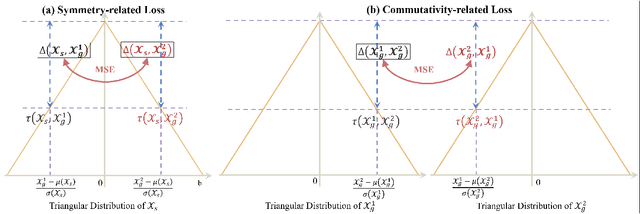
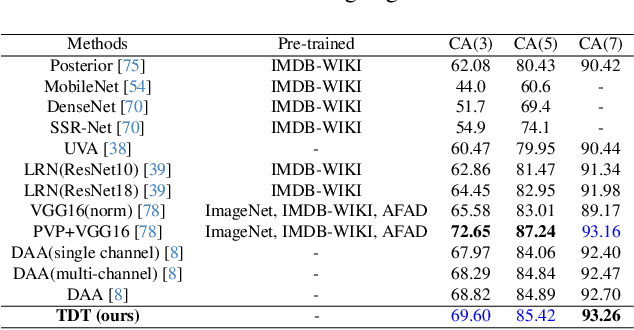
Convolution neural network is successful in pervasive vision tasks, including label distribution learning, which usually takes the form of learning an injection from the non-linear visual features to the well-defined labels. However, how the discrepancy between features is mapped to the label discrepancy is ambient, and its correctness is not guaranteed. To address these problems, we study the mathematical connection between feature and its label, presenting a general and simple framework for label distribution learning. We propose a so-called Triangular Distribution Transform (TDT) to build an injective function between feature and label, guaranteeing that any symmetric feature discrepancy linearly reflects the difference between labels. The proposed TDT can be used as a plug-in in mainstream backbone networks to address different label distribution learning tasks. Experiments on Facial Age Recognition, Illumination Chromaticity Estimation, and Aesthetics assessment show that TDT achieves on-par or better results than the prior arts.
Point Cloud Color Constancy
Nov 22, 2021



In this paper, we present Point Cloud Color Constancy, in short PCCC, an illumination chromaticity estimation algorithm exploiting a point cloud. We leverage the depth information captured by the time-of-flight (ToF) sensor mounted rigidly with the RGB sensor, and form a 6D cloud where each point contains the coordinates and RGB intensities, noted as (x,y,z,r,g,b). PCCC applies the PointNet architecture to the color constancy problem, deriving the illumination vector point-wise and then making a global decision about the global illumination chromaticity. On two popular RGB-D datasets, which we extend with illumination information, as well as on a novel benchmark, PCCC obtains lower error than the state-of-the-art algorithms. Our method is simple and fast, requiring merely 16*16-size input and reaching speed over 500 fps, including the cost of building the point cloud and net inference.
Illumination Estimation Challenge: experience of past two years
Dec 31, 2020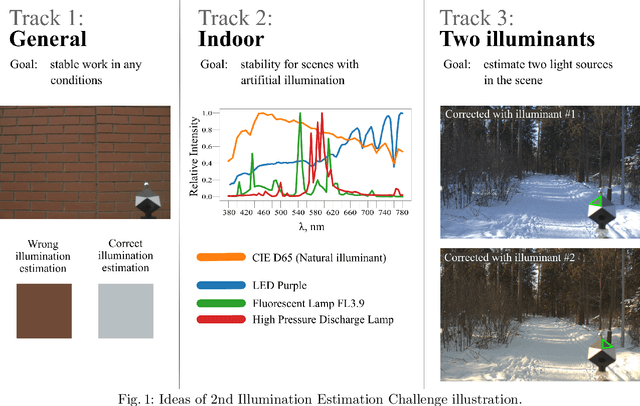
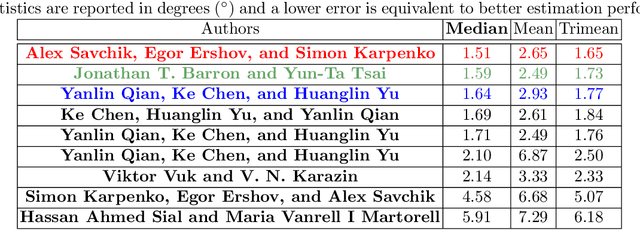
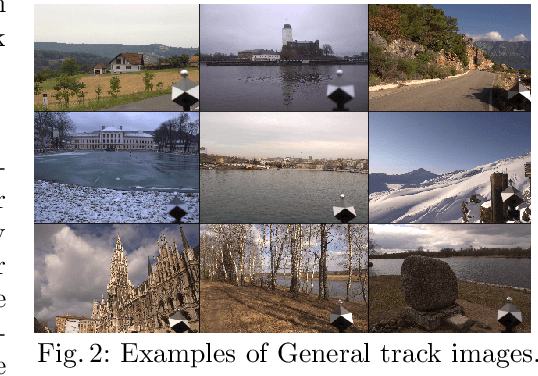
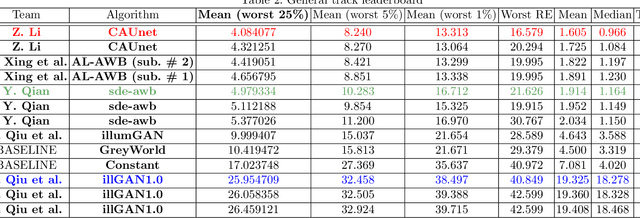
Illumination estimation is the essential step of computational color constancy, one of the core parts of various image processing pipelines of modern digital cameras. Having an accurate and reliable illumination estimation is important for reducing the illumination influence on the image colors. To motivate the generation of new ideas and the development of new algorithms in this field, the 2nd Illumination estimation challenge~(IEC\#2) was conducted. The main advantage of testing a method on a challenge over testing in on some of the known datasets is the fact that the ground-truth illuminations for the challenge test images are unknown up until the results have been submitted, which prevents any potential hyperparameter tuning that may be biased. The challenge had several tracks: general, indoor, and two-illuminant with each of them focusing on different parameters of the scenes. Other main features of it are a new large dataset of images (about 5000) taken with the same camera sensor model, a manual markup accompanying each image, diverse content with scenes taken in numerous countries under a huge variety of illuminations extracted by using the SpyderCube calibration object, and a contest-like markup for the images from the Cube+ dataset that was used in IEC\#1. This paper focuses on the description of the past two challenges, algorithms which won in each track, and the conclusions that were drawn based on the results obtained during the 1st and 2nd challenge that can be useful for similar future developments.
Fast Fourier Intrinsic Network
Nov 09, 2020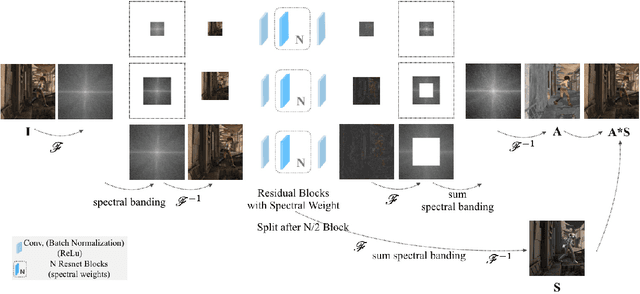
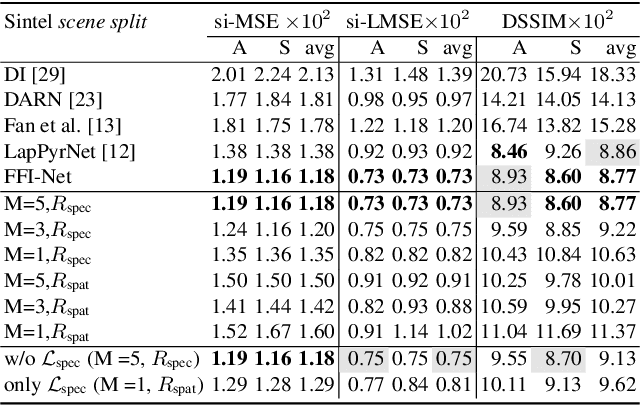
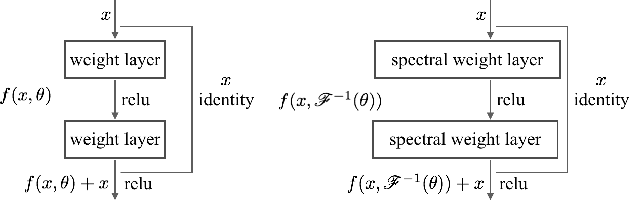
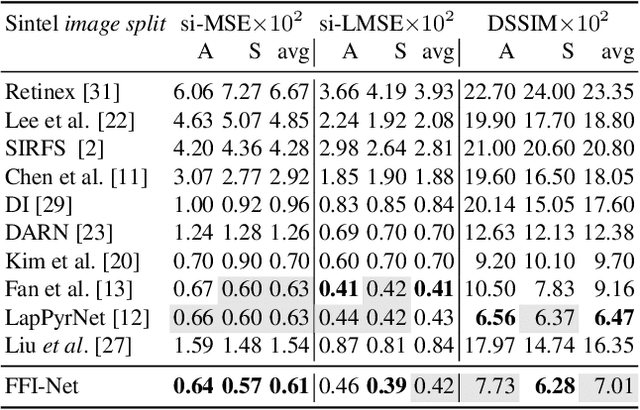
We address the problem of decomposing an image into albedo and shading. We propose the Fast Fourier Intrinsic Network, FFI-Net in short, that operates in the spectral domain, splitting the input into several spectral bands. Weights in FFI-Net are optimized in the spectral domain, allowing faster convergence to a lower error. FFI-Net is lightweight and does not need auxiliary networks for training. The network is trained end-to-end with a novel spectral loss which measures the global distance between the network prediction and corresponding ground truth. FFI-Net achieves state-of-the-art performance on MPI-Sintel, MIT Intrinsic, and IIW datasets.
SDE-AWB: a Generic Solution for 2nd International Illumination Estimation Challenge
Oct 11, 2020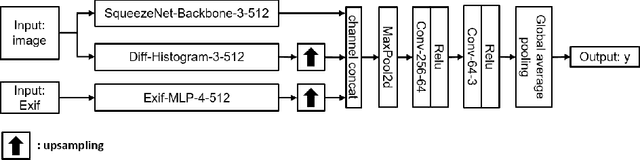
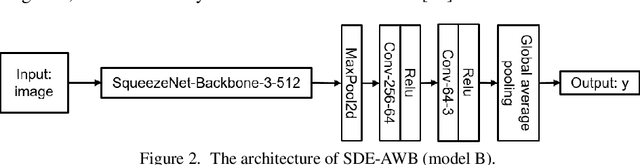
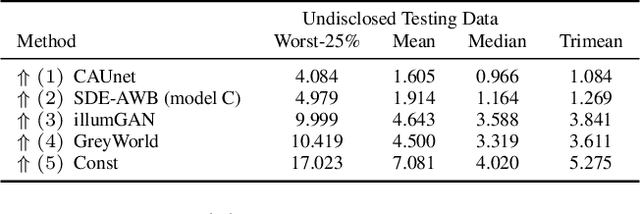
We propose a neural network-based solution for three different tracks of 2nd International Illumination Estimation Challenge (chromaticity.iitp.ru). Our method is built on pre-trained Squeeze-Net backbone, differential 2D chroma histogram layer and a shallow MLP utilizing Exif information. By combining semantic feature, color feature and Exif metadata, the resulting method -- SDE-AWB -- obtains 1st place in both indoor and two-illuminant tracks and 2nd place in general track.
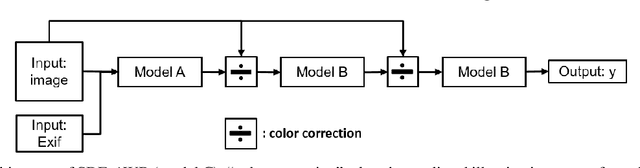
A Benchmark for Temporal Color Constancy
Mar 08, 2020
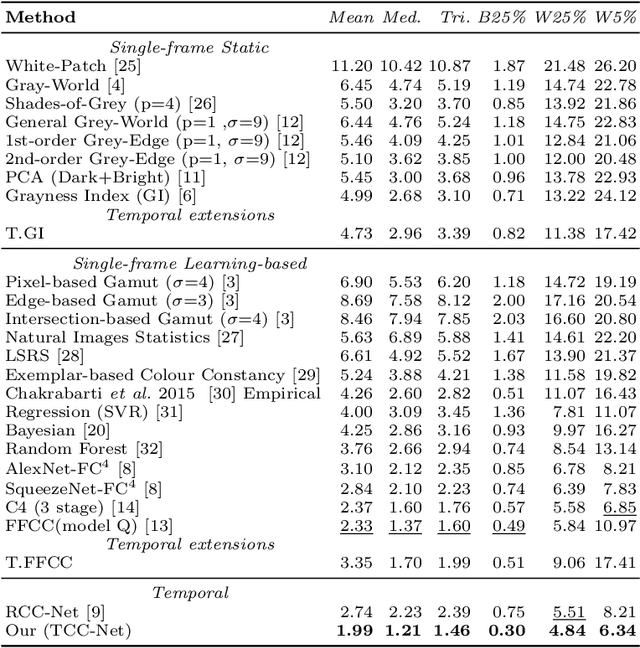
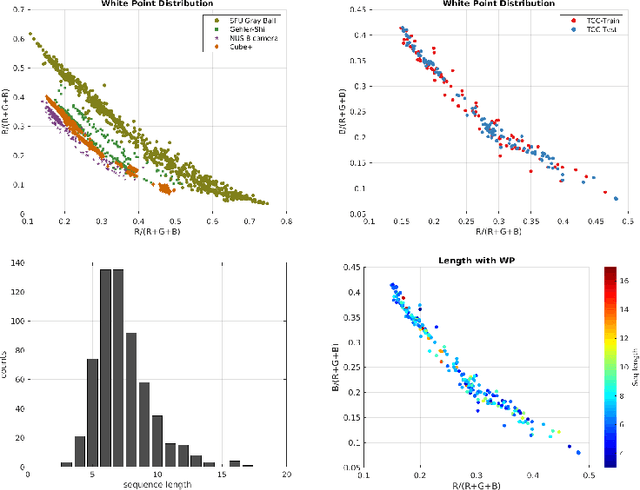
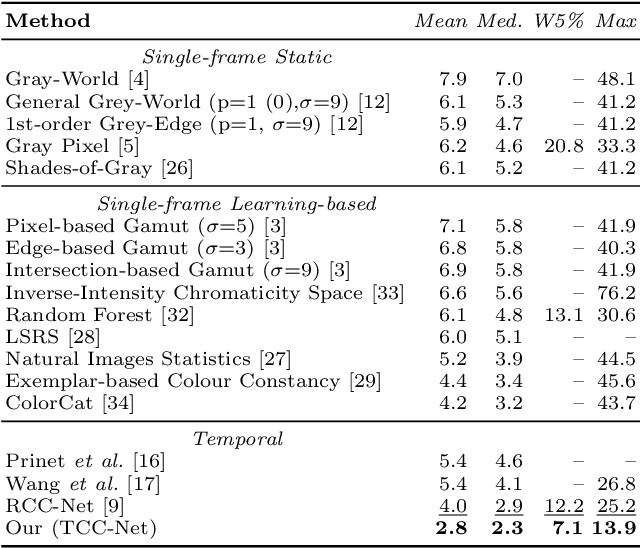
Temporal Color Constancy (CC) is a recently proposed approach that challenges the conventional single-frame color constancy. The conventional approach is to use a single frame - shot frame - to estimate the scene illumination color. In temporal CC, multiple frames from the view finder sequence are used to estimate the color. However, there are no realistic large scale temporal color constancy datasets for method evaluation. In this work, a new temporal CC benchmark is introduced. The benchmark comprises of (1) 600 real-world sequences recorded with a high-resolution mobile phone camera, (2) a fixed train-test split which ensures consistent evaluation, and (3) a baseline method which achieves high accuracy in the new benchmark and the dataset used in previous works. Results for more than 20 well-known color constancy methods including the recent state-of-the-arts are reported in our experiments.