 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUI2Code^N: A Visual Language Model for Test-Time Scalable Interactive UI-to-Code Generation
Nov 14, 2025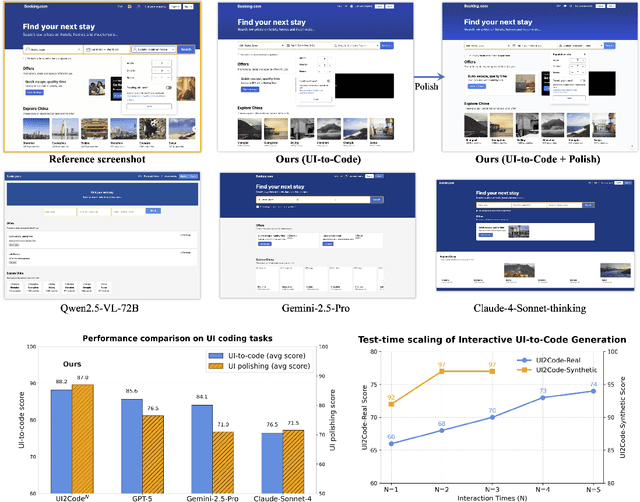
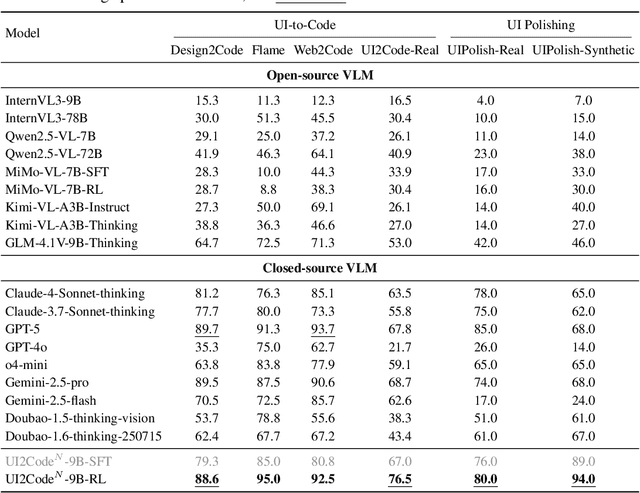
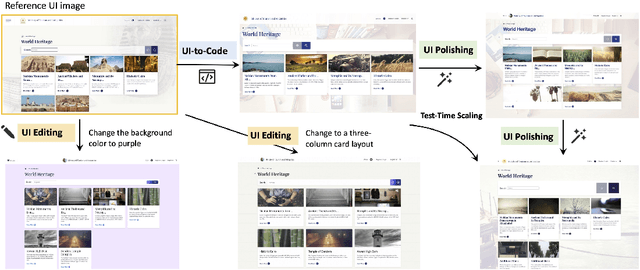

User interface (UI) programming is a core yet highly complex part of modern software development. Recent advances in visual language models (VLMs) highlight the potential of automatic UI coding, but current approaches face two key limitations: multimodal coding capabilities remain underdeveloped, and single-turn paradigms make little use of iterative visual feedback. We address these challenges with an interactive UI-to-code paradigm that better reflects real-world workflows and raises the upper bound of achievable performance. Under this paradigm, we present UI2Code$^\text{N}$, a visual language model trained through staged pretraining, fine-tuning, and reinforcement learning to achieve foundational improvements in multimodal coding. The model unifies three key capabilities: UI-to-code generation, UI editing, and UI polishing. We further explore test-time scaling for interactive generation, enabling systematic use of multi-turn feedback. Experiments on UI-to-code and UI polishing benchmarks show that UI2Code$^\text{N}$ establishes a new state of the art among open-source models and achieves performance comparable to leading closed-source models such as Claude-4-Sonnet and GPT-5. Our code and models are available at https://github.com/zai-org/UI2Code_N.
GLM-4.5: Agentic, Reasoning, and Coding (ARC) Foundation Models
Aug 08, 2025We present GLM-4.5, an open-source Mixture-of-Experts (MoE) large language model with 355B total parameters and 32B activated parameters, featuring a hybrid reasoning method that supports both thinking and direct response modes. Through multi-stage training on 23T tokens and comprehensive post-training with expert model iteration and reinforcement learning, GLM-4.5 achieves strong performance across agentic, reasoning, and coding (ARC) tasks, scoring 70.1% on TAU-Bench, 91.0% on AIME 24, and 64.2% on SWE-bench Verified. With much fewer parameters than several competitors, GLM-4.5 ranks 3rd overall among all evaluated models and 2nd on agentic benchmarks. We release both GLM-4.5 (355B parameters) and a compact version, GLM-4.5-Air (106B parameters), to advance research in reasoning and agentic AI systems. Code, models, and more information are available at https://github.com/zai-org/GLM-4.5.
GLM-4.1V-Thinking: Towards Versatile Multimodal Reasoning with Scalable Reinforcement Learning
Jul 02, 2025



We present GLM-4.1V-Thinking, a vision-language model (VLM) designed to advance general-purpose multimodal understanding and reasoning. In this report, we share our key findings in the development of the reasoning-centric training framework. We first develop a capable vision foundation model with significant potential through large-scale pre-training, which arguably sets the upper bound for the final performance. We then propose Reinforcement Learning with Curriculum Sampling (RLCS) to unlock the full potential of the model, leading to comprehensive capability enhancement across a diverse range of tasks, including STEM problem solving, video understanding, content recognition, coding, grounding, GUI-based agents, and long document understanding. We open-source GLM-4.1V-9B-Thinking, which achieves state-of-the-art performance among models of comparable size. In a comprehensive evaluation across 28 public benchmarks, our model outperforms Qwen2.5-VL-7B on nearly all tasks and achieves comparable or even superior performance on 18 benchmarks relative to the significantly larger Qwen2.5-VL-72B. Notably, GLM-4.1V-9B-Thinking also demonstrates competitive or superior performance compared to closed-source models such as GPT-4o on challenging tasks including long document understanding and STEM reasoning, further underscoring its strong capabilities. Code, models and more information are released at https://github.com/THUDM/GLM-4.1V-Thinking.
MotionBench: Benchmarking and Improving Fine-grained Video Motion Understanding for Vision Language Models
Jan 06, 2025
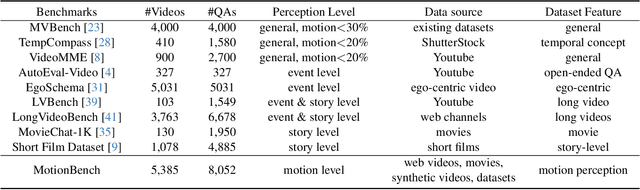


In recent years, vision language models (VLMs) have made significant advancements in video understanding. However, a crucial capability - fine-grained motion comprehension - remains under-explored in current benchmarks. To address this gap, we propose MotionBench, a comprehensive evaluation benchmark designed to assess the fine-grained motion comprehension of video understanding models. MotionBench evaluates models' motion-level perception through six primary categories of motion-oriented question types and includes data collected from diverse sources, ensuring a broad representation of real-world video content. Experimental results reveal that existing VLMs perform poorly in understanding fine-grained motions. To enhance VLM's ability to perceive fine-grained motion within a limited sequence length of LLM, we conduct extensive experiments reviewing VLM architectures optimized for video feature compression and propose a novel and efficient Through-Encoder (TE) Fusion method. Experiments show that higher frame rate inputs and TE Fusion yield improvements in motion understanding, yet there is still substantial room for enhancement. Our benchmark aims to guide and motivate the development of more capable video understanding models, emphasizing the importance of fine-grained motion comprehension. Project page: https://motion-bench.github.io .
CogVLM2: Visual Language Models for Image and Video Understanding
Aug 29, 2024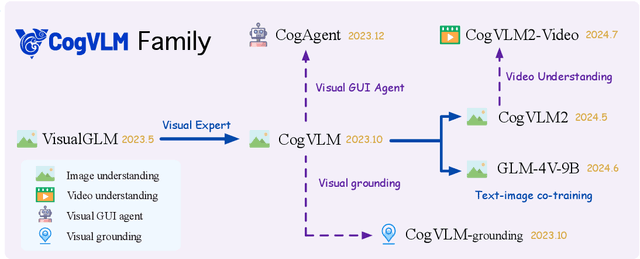

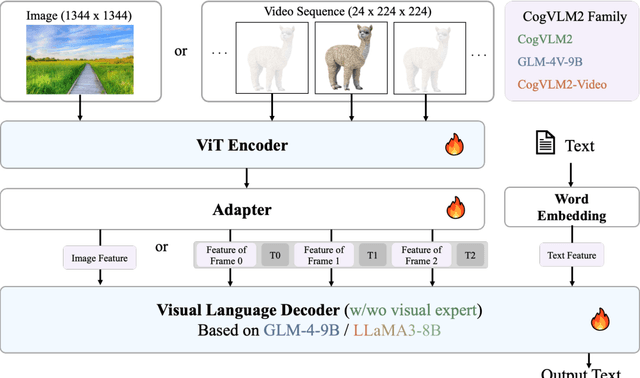
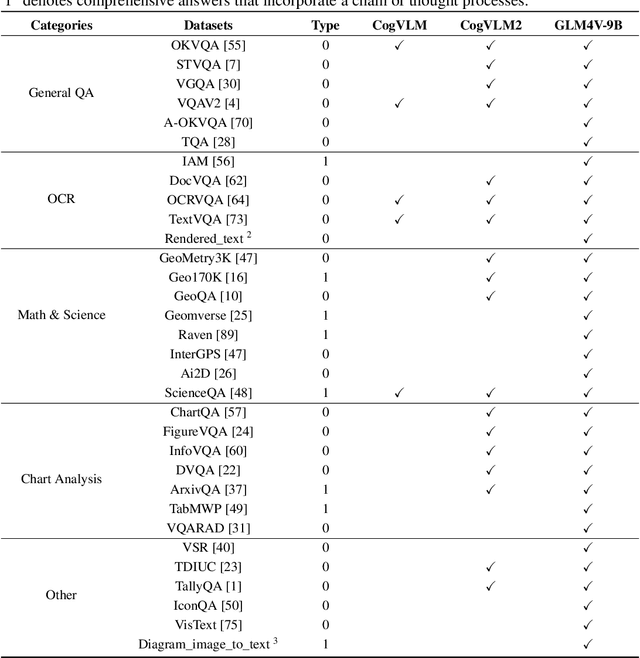
Beginning with VisualGLM and CogVLM, we are continuously exploring VLMs in pursuit of enhanced vision-language fusion, efficient higher-resolution architecture, and broader modalities and applications. Here we propose the CogVLM2 family, a new generation of visual language models for image and video understanding including CogVLM2, CogVLM2-Video and GLM-4V. As an image understanding model, CogVLM2 inherits the visual expert architecture with improved training recipes in both pre-training and post-training stages, supporting input resolution up to $1344 \times 1344$ pixels. As a video understanding model, CogVLM2-Video integrates multi-frame input with timestamps and proposes automated temporal grounding data construction. Notably, CogVLM2 family has achieved state-of-the-art results on benchmarks like MMBench, MM-Vet, TextVQA, MVBench and VCGBench. All models are open-sourced in https://github.com/THUDM/CogVLM2 and https://github.com/THUDM/GLM-4, contributing to the advancement of the field.
CogVideoX: Text-to-Video Diffusion Models with An Expert Transformer
Aug 12, 2024We introduce CogVideoX, a large-scale diffusion transformer model designed for generating videos based on text prompts. To efficently model video data, we propose to levearge a 3D Variational Autoencoder (VAE) to compress videos along both spatial and temporal dimensions. To improve the text-video alignment, we propose an expert transformer with the expert adaptive LayerNorm to facilitate the deep fusion between the two modalities. By employing a progressive training technique, CogVideoX is adept at producing coherent, long-duration videos characterized by significant motions. In addition, we develop an effective text-video data processing pipeline that includes various data preprocessing strategies and a video captioning method. It significantly helps enhance the performance of CogVideoX, improving both generation quality and semantic alignment. Results show that CogVideoX demonstrates state-of-the-art performance across both multiple machine metrics and human evaluations. The model weights of both the 3D Causal VAE and CogVideoX are publicly available at https://github.com/THUDM/CogVideo.
VIPeR: Visual Incremental Place Recognition with Adaptive Mining and Lifelong Learning
Jul 31, 2024Visual place recognition (VPR) is an essential component of many autonomous and augmented/virtual reality systems. It enables the systems to robustly localize themselves in large-scale environments. Existing VPR methods demonstrate attractive performance at the cost of heavy pre-training and limited generalizability. When deployed in unseen environments, these methods exhibit significant performance drops. Targeting this issue, we present VIPeR, a novel approach for visual incremental place recognition with the ability to adapt to new environments while retaining the performance of previous environments. We first introduce an adaptive mining strategy that balances the performance within a single environment and the generalizability across multiple environments. Then, to prevent catastrophic forgetting in lifelong learning, we draw inspiration from human memory systems and design a novel memory bank for our VIPeR. Our memory bank contains a sensory memory, a working memory and a long-term memory, with the first two focusing on the current environment and the last one for all previously visited environments. Additionally, we propose a probabilistic knowledge distillation to explicitly safeguard the previously learned knowledge. We evaluate our proposed VIPeR on three large-scale datasets, namely Oxford Robotcar, Nordland, and TartanAir. For comparison, we first set a baseline performance with naive finetuning. Then, several more recent lifelong learning methods are compared. Our VIPeR achieves better performance in almost all aspects with the biggest improvement of 13.65% in average performance.
LVBench: An Extreme Long Video Understanding Benchmark
Jun 12, 2024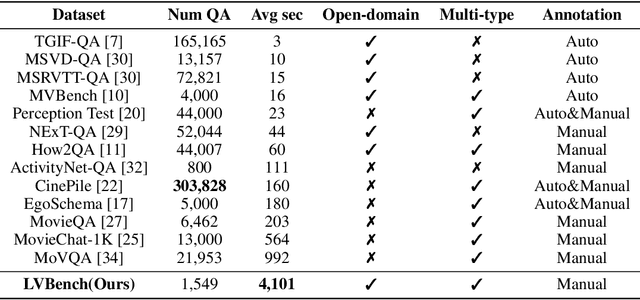
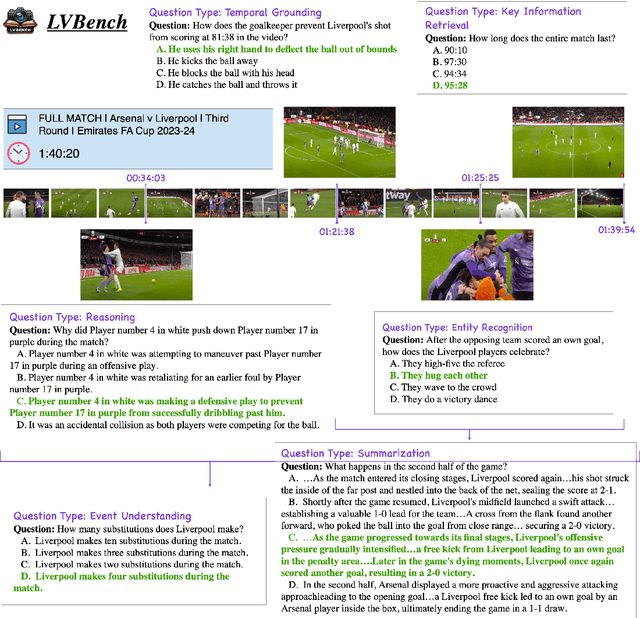
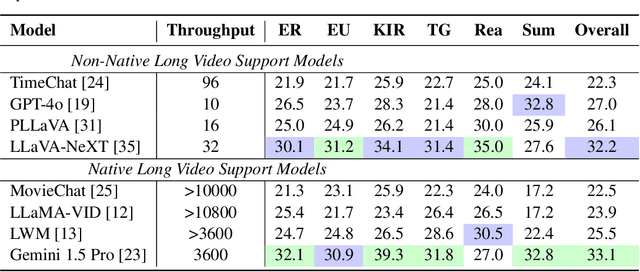
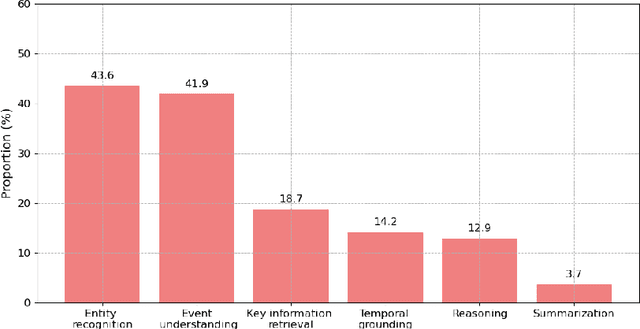
Recent progress in multimodal large language models has markedly enhanced the understanding of short videos (typically under one minute), and several evaluation datasets have emerged accordingly. However, these advancements fall short of meeting the demands of real-world applications such as embodied intelligence for long-term decision-making, in-depth movie reviews and discussions, and live sports commentary, all of which require comprehension of long videos spanning several hours. To address this gap, we introduce LVBench, a benchmark specifically designed for long video understanding. Our dataset comprises publicly sourced videos and encompasses a diverse set of tasks aimed at long video comprehension and information extraction. LVBench is designed to challenge multimodal models to demonstrate long-term memory and extended comprehension capabilities. Our extensive evaluations reveal that current multimodal models still underperform on these demanding long video understanding tasks. Through LVBench, we aim to spur the development of more advanced models capable of tackling the complexities of long video comprehension. Our data and code are publicly available at: https://lvbench.github.io.
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
May 09, 2024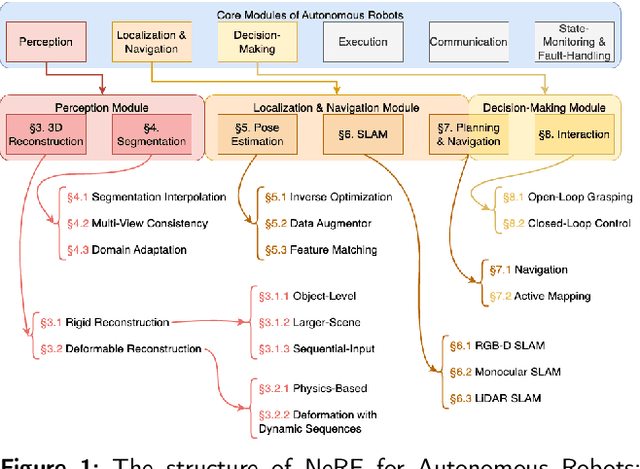
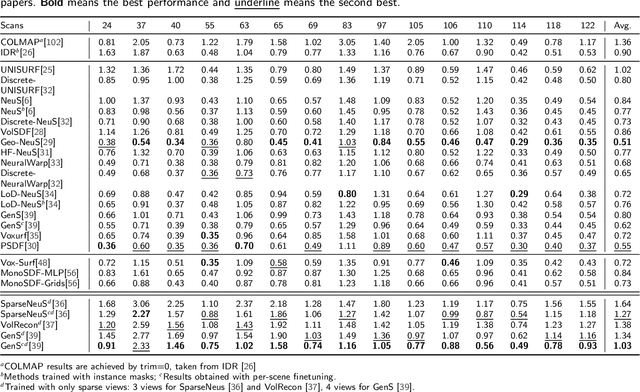
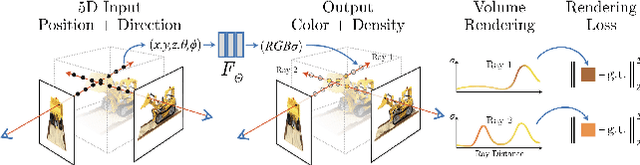
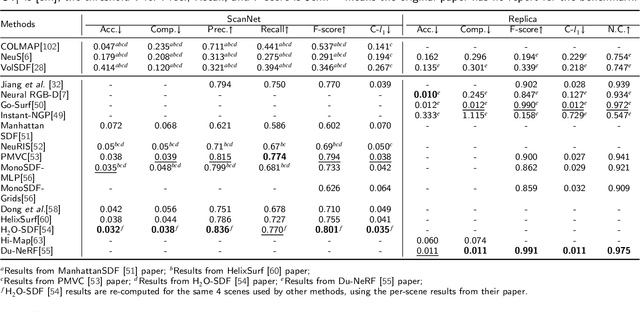
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
Stereo-NEC: Enhancing Stereo Visual-Inertial SLAM Initialization with Normal Epipolar Constraints
Mar 12, 2024



We propose an accurate and robust initialization approach for stereo visual-inertial SLAM systems. Unlike the current state-of-the-art method, which heavily relies on the accuracy of a pure visual SLAM system to estimate inertial variables without updating camera poses, potentially compromising accuracy and robustness, our approach offers a different solution. We realize the crucial impact of precise gyroscope bias estimation on rotation accuracy. This, in turn, affects trajectory accuracy due to the accumulation of translation errors. To address this, we first independently estimate the gyroscope bias and use it to formulate a maximum a posteriori problem for further refinement. After this refinement, we proceed to update the rotation estimation by performing IMU integration with gyroscope bias removed from gyroscope measurements. We then leverage robust and accurate rotation estimates to enhance translation estimation via 3-DoF bundle adjustment. Moreover, we introduce a novel approach for determining the success of the initialization by evaluating the residual of the normal epipolar constraint. Extensive evaluations on the EuRoC dataset illustrate that our method excels in accuracy and robustness. It outperforms ORB-SLAM3, the current leading stereo visual-inertial initialization method, in terms of absolute trajectory error and relative rotation error, while maintaining competitive computational speed. Notably, even with 5 keyframes for initialization, our method consistently surpasses the state-of-the-art approach using 10 keyframes in rotation accuracy.