 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClimate Prompting: Generating the Madden-Julian Oscillation using Video Diffusion and Low-Dimensional Conditioning
Mar 23, 2026Generative Deep Learning is a powerful tool for modeling of the Madden-Julian oscillation (MJO) in the tropics, yet its relationship to traditional theoretical frameworks remains poorly understood. Here we propose a video diffusion model, trained on atmospheric reanalysis, to synthetize long MJO sequences conditioned on key low-dimensional metrics. The generated MJOs capture key features including composites, power spectra and multiscale structures including convectively coupled waves, despite some bias. We then prompt the model to generate more tractable MJOs based on intentionally idealized low-dimensional conditionings, for example a perpetual MJO, an isolated modulation by seasons and/or the El Nino-Southern Oscillation, and so on. This enables deconstructing the underlying processes and identifying physical drivers. The present approach provides a practical framework for bridging the gap between low-dimensional MJO theory and high-resolution atmospheric complexity and will help tropical atmosphere prediction.
A Large-Scale Dataset for Molecular Structure-Language Description via a Rule-Regularized Method
Feb 02, 2026Molecular function is largely determined by structure. Accurately aligning molecular structure with natural language is therefore essential for enabling large language models (LLMs) to reason about downstream chemical tasks. However, the substantial cost of human annotation makes it infeasible to construct large-scale, high-quality datasets of structure-grounded descriptions. In this work, we propose a fully automated annotation framework for generating precise molecular structure descriptions at scale. Our approach builds upon and extends a rule-based chemical nomenclature parser to interpret IUPAC names and construct enriched, structured XML metadata that explicitly encodes molecular structure. This metadata is then used to guide LLMs in producing accurate natural-language descriptions. Using this framework, we curate a large-scale dataset of approximately $163$k molecule-description pairs. A rigorous validation protocol combining LLM-based and expert human evaluation on a subset of $2,000$ molecules demonstrates a high description precision of $98.6\%$. The resulting dataset provides a reliable foundation for future molecule-language alignment, and the proposed annotation method is readily extensible to larger datasets and broader chemical tasks that rely on structural descriptions.
MolLangBench: A Comprehensive Benchmark for Language-Prompted Molecular Structure Recognition, Editing, and Generation
May 21, 2025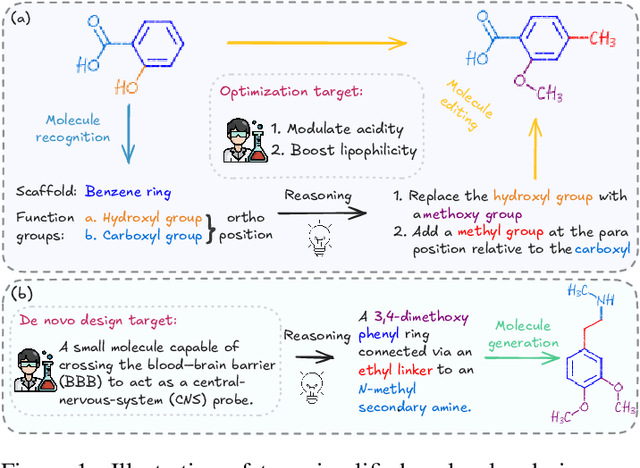
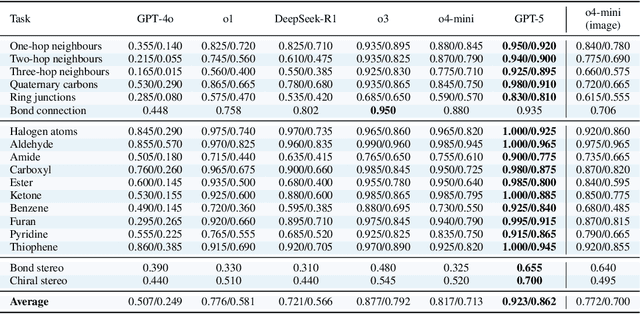
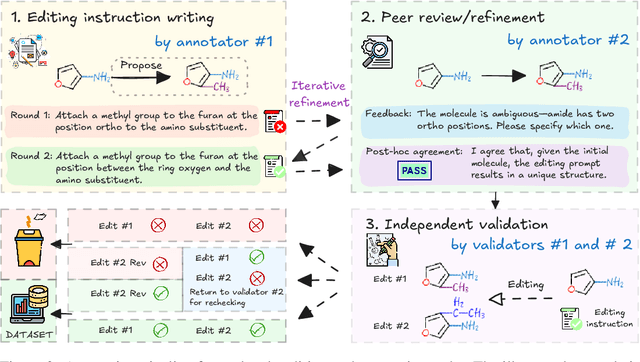

Precise recognition, editing, and generation of molecules are essential prerequisites for both chemists and AI systems tackling various chemical tasks. We present MolLangBench, a comprehensive benchmark designed to evaluate fundamental molecule-language interface tasks: language-prompted molecular structure recognition, editing, and generation. To ensure high-quality, unambiguous, and deterministic outputs, we construct the recognition tasks using automated cheminformatics tools, and curate editing and generation tasks through rigorous expert annotation and validation. MolLangBench supports the evaluation of models that interface language with different molecular representations, including linear strings, molecular images, and molecular graphs. Evaluations of state-of-the-art models reveal significant limitations: the strongest model (o3) achieves $79.2\%$ and $78.5\%$ accuracy on recognition and editing tasks, which are intuitively simple for humans, and performs even worse on the generation task, reaching only $29.0\%$ accuracy. These results highlight the shortcomings of current AI systems in handling even preliminary molecular recognition and manipulation tasks. We hope MolLangBench will catalyze further research toward more effective and reliable AI systems for chemical applications.
Scalable Surrogate Verification of Image-based Neural Network Control Systems using Composition and Unrolling
May 28, 2024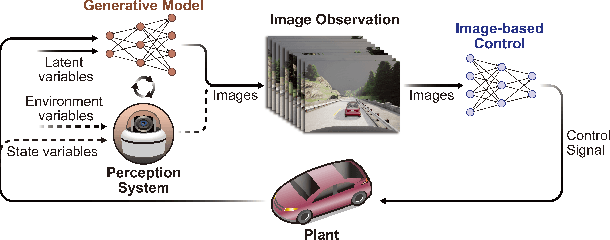
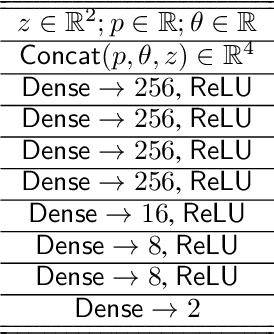
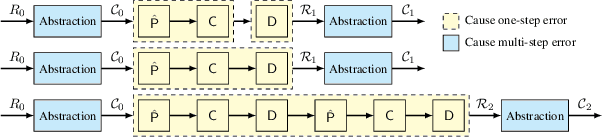
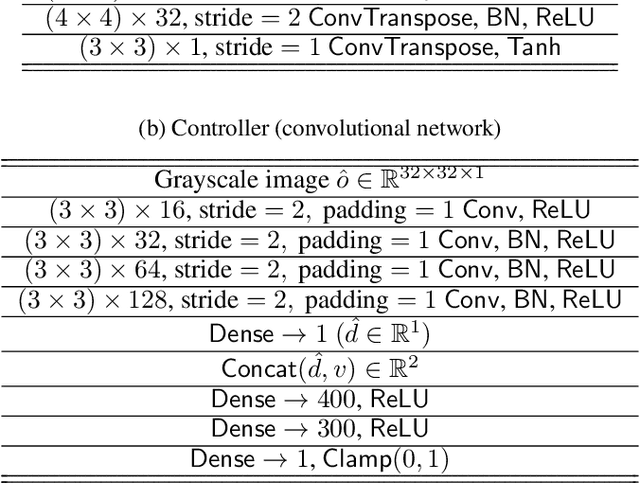
Verifying safety of neural network control systems that use images as input is a difficult problem because, from a given system state, there is no known way to mathematically model what images are possible in the real-world. We build on recent work that considers a surrogate verification approach, training a conditional generative adversarial network (cGAN) as an image generator in place of the real world. This enables set-based formal analysis of the closed-loop system, providing analysis beyond simulation and testing. While existing work is effective on small examples, excessive overapproximation both within a single control period and across multiple control periods limits its scalability. We propose approaches to overcome these two sources of error. First, we overcome one-step error by composing the system's dynamics along with the cGAN and neural network controller, without losing the dependencies between input states and the control outputs as in the monotonic analysis of the system dynamics. Second, we reduce multi-step error by repeating the single-step composition, essentially unrolling multiple steps of the control loop into a large neural network. We then leverage existing network verification tools to compute accurate reachable sets for multiple steps, avoiding the accumulation of abstraction error at each step. We demonstrate the effectiveness of our approach in terms of both accuracy and scalability using two case studies: an autonomous aircraft taxiing system and an advanced emergency braking system. On the aircraft taxiing system, the converged reachable set is 175% larger using the prior baseline method compared with our proposed approach. On the emergency braking system, with 24x the number of image output variables from the cGAN, the baseline method fails to prove any states are safe, whereas our improvements enable set-based safety analysis.
Stereo-NEC: Enhancing Stereo Visual-Inertial SLAM Initialization with Normal Epipolar Constraints
Mar 12, 2024



We propose an accurate and robust initialization approach for stereo visual-inertial SLAM systems. Unlike the current state-of-the-art method, which heavily relies on the accuracy of a pure visual SLAM system to estimate inertial variables without updating camera poses, potentially compromising accuracy and robustness, our approach offers a different solution. We realize the crucial impact of precise gyroscope bias estimation on rotation accuracy. This, in turn, affects trajectory accuracy due to the accumulation of translation errors. To address this, we first independently estimate the gyroscope bias and use it to formulate a maximum a posteriori problem for further refinement. After this refinement, we proceed to update the rotation estimation by performing IMU integration with gyroscope bias removed from gyroscope measurements. We then leverage robust and accurate rotation estimates to enhance translation estimation via 3-DoF bundle adjustment. Moreover, we introduce a novel approach for determining the success of the initialization by evaluating the residual of the normal epipolar constraint. Extensive evaluations on the EuRoC dataset illustrate that our method excels in accuracy and robustness. It outperforms ORB-SLAM3, the current leading stereo visual-inertial initialization method, in terms of absolute trajectory error and relative rotation error, while maintaining competitive computational speed. Notably, even with 5 keyframes for initialization, our method consistently surpasses the state-of-the-art approach using 10 keyframes in rotation accuracy.
Open Set Recognition using Vision Transformer with an Additional Detection Head
Mar 16, 2022

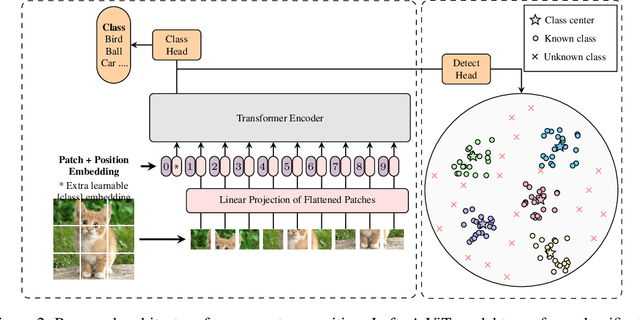

Deep neural networks have demonstrated prominent capacities for image classification tasks in a closed set setting, where the test data come from the same distribution as the training data. However, in a more realistic open set scenario, traditional classifiers with incomplete knowledge cannot tackle test data that are not from the training classes. Open set recognition (OSR) aims to address this problem by both identifying unknown classes and distinguishing known classes simultaneously. In this paper, we propose a novel approach to OSR that is based on the vision transformer (ViT) technique. Specifically, our approach employs two separate training stages. First, a ViT model is trained to perform closed set classification. Then, an additional detection head is attached to the embedded features extracted by the ViT, trained to force the representations of known data to class-specific clusters compactly. Test examples are identified as known or unknown based on their distance to the cluster centers. To the best of our knowledge, this is the first time to leverage ViT for the purpose of OSR, and our extensive evaluation against several OSR benchmark datasets reveals that our approach significantly outperforms other baseline methods and obtains new state-of-the-art performance.
Detection of Dataset Shifts in Learning-Enabled Cyber-Physical Systems using Variational Autoencoder for Regression
Apr 14, 2021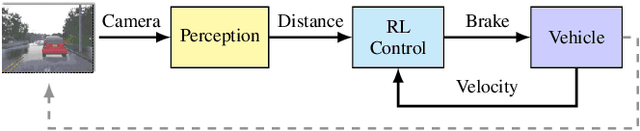
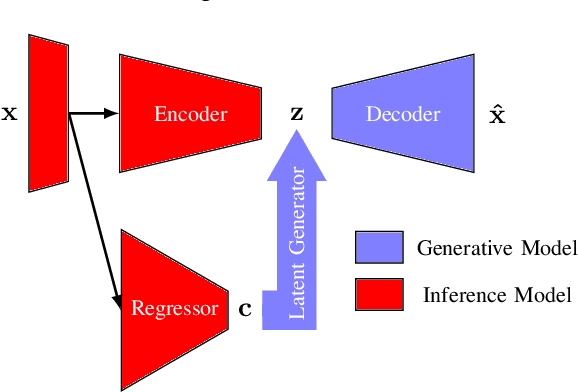
Cyber-physical systems (CPSs) use learning-enabled components (LECs) extensively to cope with various complex tasks under high-uncertainty environments. However, the dataset shifts between the training and testing phase may lead the LECs to become ineffective to make large-error predictions, and further, compromise the safety of the overall system. In our paper, we first provide the formal definitions for different types of dataset shifts in learning-enabled CPS. Then, we propose an approach to detect the dataset shifts effectively for regression problems. Our approach is based on the inductive conformal anomaly detection and utilizes a variational autoencoder for regression model which enables the approach to take into consideration both LEC input and output for detecting dataset shifts. Additionally, in order to improve the robustness of detection, layer-wise relevance propagation (LRP) is incorporated into our approach. We demonstrate our approach by using an advanced emergency braking system implemented in an open-source simulator for self-driving cars. The evaluation results show that our approach can detect different types of dataset shifts with a small number of false alarms while the execution time is smaller than the sampling period of the system.
Association: Remind Your GAN not to Forget
Nov 27, 2020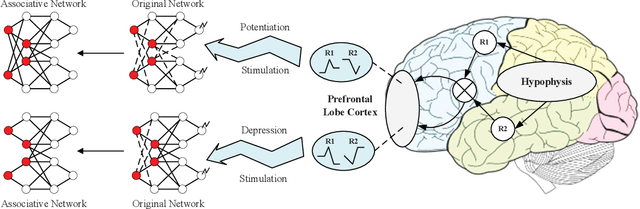
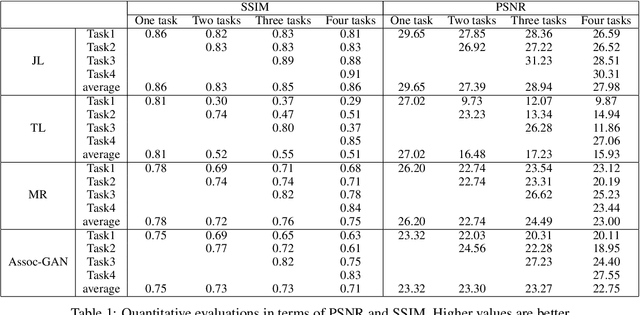
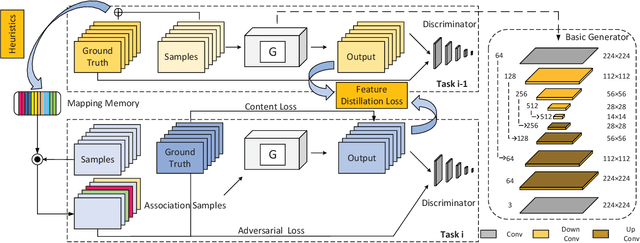
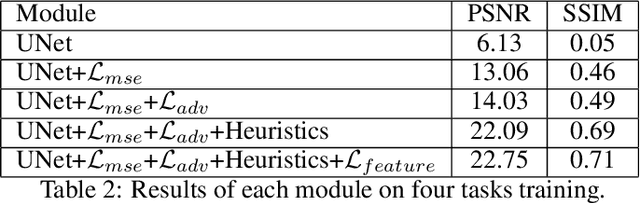
Neural networks are susceptible to catastrophic forgetting. They fail to preserve previously acquired knowledge when adapting to new tasks. Inspired by human associative memory system, we propose a brain-like approach that imitates the associative learning process to achieve continual learning. We design a heuristics mechanism to potentiatively stimulates the model, which guides the model to recall the historical episodes based on the current circumstance and obtained association experience. Besides, a distillation measure is added to depressively alter the efficacy of synaptic transmission, which dampens the feature reconstruction learning for new task. The framework is mediated by potentiation and depression stimulation that play opposing roles in directing synaptic and behavioral plasticity. It requires no access to the original data and is more similar to human cognitive process. Experiments demonstrate the effectiveness of our method in alleviating catastrophic forgetting on continual image reconstruction problems.
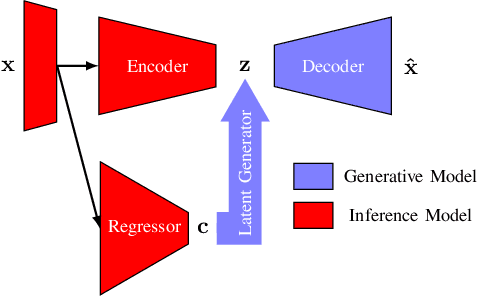
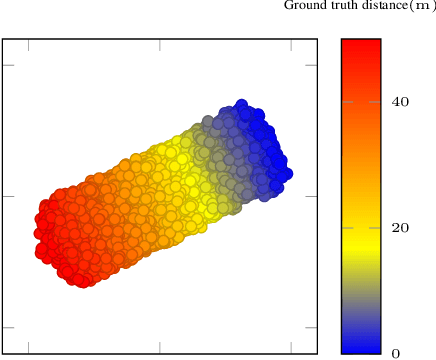
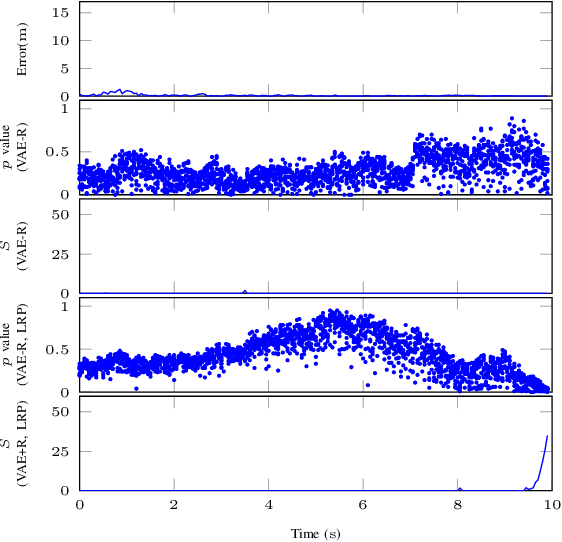
Detecting Adversarial Examples in Learning-Enabled Cyber-Physical Systems using Variational Autoencoder for Regression
Mar 21, 2020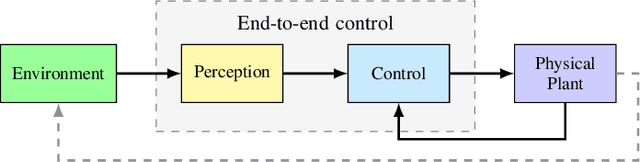
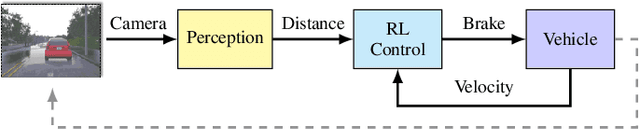
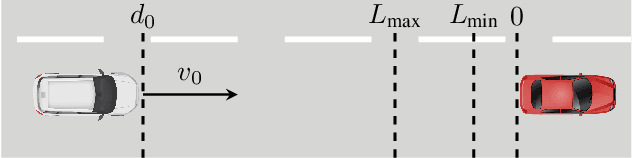
Learning-enabled components (LECs) are widely used in cyber-physical systems (CPS) since they can handle the uncertainty and variability of the environment and increase the level of autonomy. However, it has been shown that LECs such as deep neural networks (DNN) are not robust and adversarial examples can cause the model to make a false prediction. The paper considers the problem of efficiently detecting adversarial examples in LECs used for regression in CPS. The proposed approach is based on inductive conformal prediction and uses a regression model based on variational autoencoder. The architecture allows to take into consideration both the input and the neural network prediction for detecting adversarial, and more generally, out-of-distribution examples. We demonstrate the method using an advanced emergency braking system implemented in an open source simulator for self-driving cars where a DNN is used to estimate the distance to an obstacle. The simulation results show that the method can effectively detect adversarial examples with a short detection delay.
Real-time Out-of-distribution Detection in Learning-Enabled Cyber-Physical Systems
Jan 28, 2020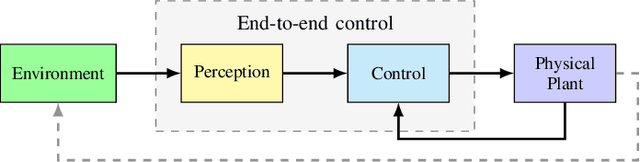
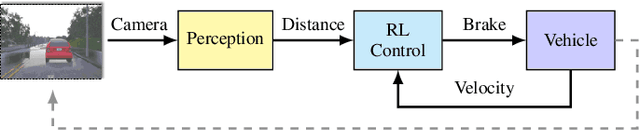
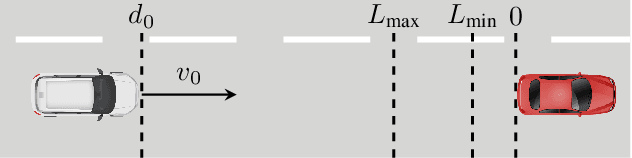
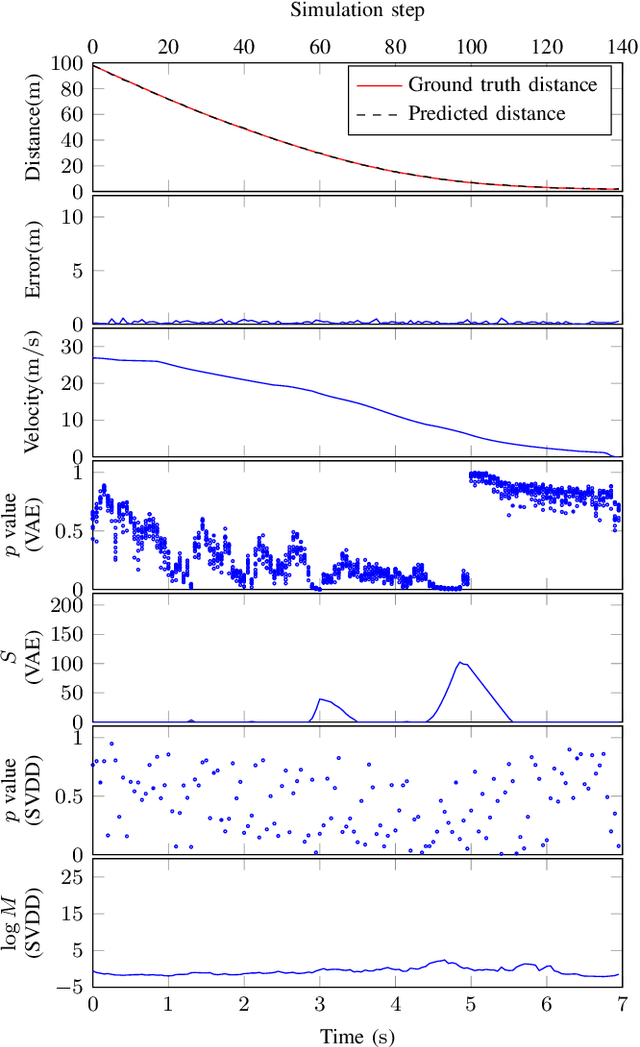
Cyber-physical systems (CPS) greatly benefit by using machine learning components that can handle the uncertainty and variability of the real-world. Typical components such as deep neural networks, however, introduce new types of hazards that may impact system safety. The system behavior depends on data that are available only during runtime and may be different than the data used for training. Out-of-distribution data may lead to a large error and compromise safety. The paper considers the problem of efficiently detecting out-of-distribution data in CPS control systems. Detection must be robust and limit the number of false alarms while being computational efficient for real-time monitoring. The proposed approach leverages inductive conformal prediction and anomaly detection for developing a method that has a well-calibrated false alarm rate. We use variational autoencoders and deep support vector data description to learn models that can be used efficiently compute the nonconformity of new inputs relative to the training set and enable real-time detection of out-of-distribution high-dimensional inputs. We demonstrate the method using an advanced emergency braking system and a self-driving end-to-end controller implemented in an open source simulator for self-driving cars. The simulation results show very small number of false positives and detection delay while the execution time is comparable to the execution time of the original machine learning components.