 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Out-of-distribution Detection in Learning-Enabled Cyber-Physical Systems
Paper and Code
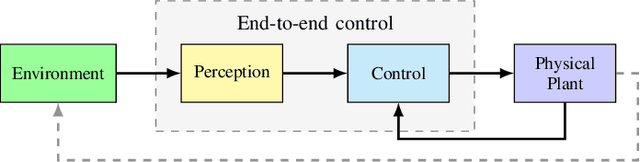
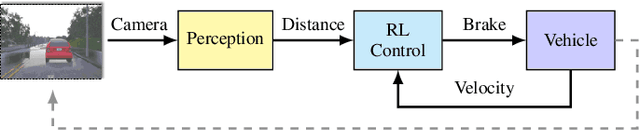
Cyber-physical systems (CPS) greatly benefit by using machine learning components that can handle the uncertainty and variability of the real-world. Typical components such as deep neural networks, however, introduce new types of hazards that may impact system safety. The system behavior depends on data that are available only during runtime and may be different than the data used for training. Out-of-distribution data may lead to a large error and compromise safety. The paper considers the problem of efficiently detecting out-of-distribution data in CPS control systems. Detection must be robust and limit the number of false alarms while being computational efficient for real-time monitoring. The proposed approach leverages inductive conformal prediction and anomaly detection for developing a method that has a well-calibrated false alarm rate. We use variational autoencoders and deep support vector data description to learn models that can be used efficiently compute the nonconformity of new inputs relative to the training set and enable real-time detection of out-of-distribution high-dimensional inputs. We demonstrate the method using an advanced emergency braking system and a self-driving end-to-end controller implemented in an open source simulator for self-driving cars. The simulation results show very small number of false positives and detection delay while the execution time is comparable to the execution time of the original machine learning components.