 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemma 3 Technical Report
Mar 25, 2025We introduce Gemma 3, a multimodal addition to the Gemma family of lightweight open models, ranging in scale from 1 to 27 billion parameters. This version introduces vision understanding abilities, a wider coverage of languages and longer context - at least 128K tokens. We also change the architecture of the model to reduce the KV-cache memory that tends to explode with long context. This is achieved by increasing the ratio of local to global attention layers, and keeping the span on local attention short. The Gemma 3 models are trained with distillation and achieve superior performance to Gemma 2 for both pre-trained and instruction finetuned versions. In particular, our novel post-training recipe significantly improves the math, chat, instruction-following and multilingual abilities, making Gemma3-4B-IT competitive with Gemma2-27B-IT and Gemma3-27B-IT comparable to Gemini-1.5-Pro across benchmarks. We release all our models to the community.
Scaling Autoregressive Multi-Modal Models: Pretraining and Instruction Tuning
Sep 05, 2023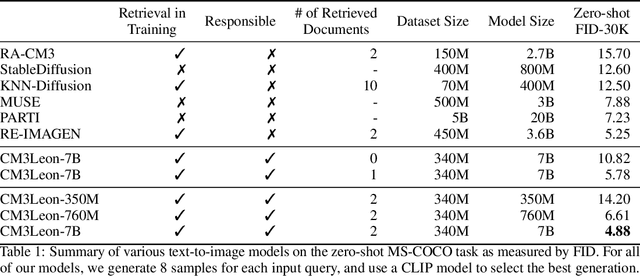
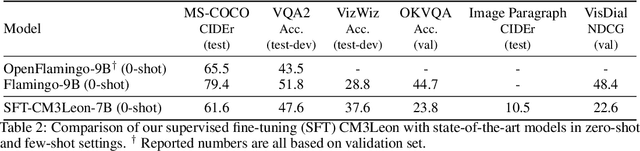
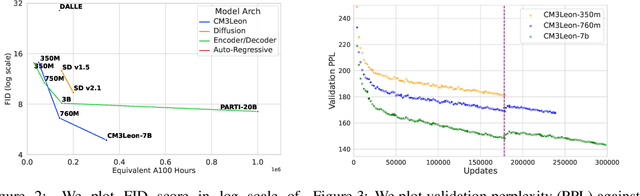

We present CM3Leon (pronounced "Chameleon"), a retrieval-augmented, token-based, decoder-only multi-modal language model capable of generating and infilling both text and images. CM3Leon uses the CM3 multi-modal architecture but additionally shows the extreme benefits of scaling up and tuning on more diverse instruction-style data. It is the first multi-modal model trained with a recipe adapted from text-only language models, including a large-scale retrieval-augmented pre-training stage and a second multi-task supervised fine-tuning (SFT) stage. It is also a general-purpose model that can do both text-to-image and image-to-text generation, allowing us to introduce self-contained contrastive decoding methods that produce high-quality outputs. Extensive experiments demonstrate that this recipe is highly effective for multi-modal models. CM3Leon achieves state-of-the-art performance in text-to-image generation with 5x less training compute than comparable methods (zero-shot MS-COCO FID of 4.88). After SFT, CM3Leon can also demonstrate unprecedented levels of controllability in tasks ranging from language-guided image editing to image-controlled generation and segmentation.
LIMA: Less Is More for Alignment
May 18, 2023



Large language models are trained in two stages: (1) unsupervised pretraining from raw text, to learn general-purpose representations, and (2) large scale instruction tuning and reinforcement learning, to better align to end tasks and user preferences. We measure the relative importance of these two stages by training LIMA, a 65B parameter LLaMa language model fine-tuned with the standard supervised loss on only 1,000 carefully curated prompts and responses, without any reinforcement learning or human preference modeling. LIMA demonstrates remarkably strong performance, learning to follow specific response formats from only a handful of examples in the training data, including complex queries that range from planning trip itineraries to speculating about alternate history. Moreover, the model tends to generalize well to unseen tasks that did not appear in the training data. In a controlled human study, responses from LIMA are either equivalent or strictly preferred to GPT-4 in 43% of cases; this statistic is as high as 58% when compared to Bard and 65% versus DaVinci003, which was trained with human feedback. Taken together, these results strongly suggest that almost all knowledge in large language models is learned during pretraining, and only limited instruction tuning data is necessary to teach models to produce high quality output.
A Theory on Adam Instability in Large-Scale Machine Learning
Apr 25, 2023



We present a theory for the previously unexplained divergent behavior noticed in the training of large language models. We argue that the phenomenon is an artifact of the dominant optimization algorithm used for training, called Adam. We observe that Adam can enter a state in which the parameter update vector has a relatively large norm and is essentially uncorrelated with the direction of descent on the training loss landscape, leading to divergence. This artifact is more likely to be observed in the training of a deep model with a large batch size, which is the typical setting of large-scale language model training. To argue the theory, we present observations from the training runs of the language models of different scales: 7 billion, 30 billion, 65 billion, and 546 billion parameters.
Effective Theory of Transformers at Initialization
Apr 04, 2023



We perform an effective-theory analysis of forward-backward signal propagation in wide and deep Transformers, i.e., residual neural networks with multi-head self-attention blocks and multilayer perceptron blocks. This analysis suggests particular width scalings of initialization and training hyperparameters for these models. We then take up such suggestions, training Vision and Language Transformers in practical setups.
Scaling Laws for Generative Mixed-Modal Language Models
Jan 10, 2023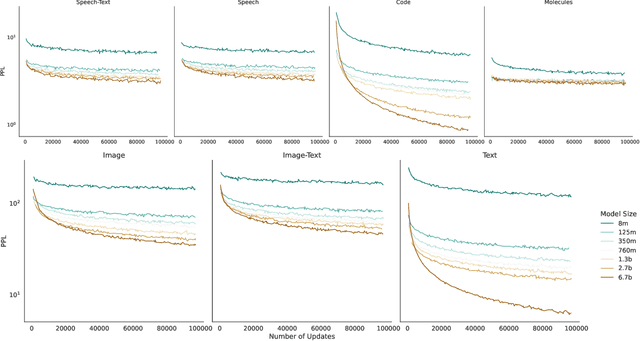
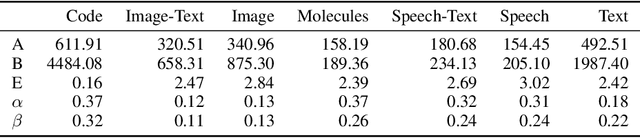
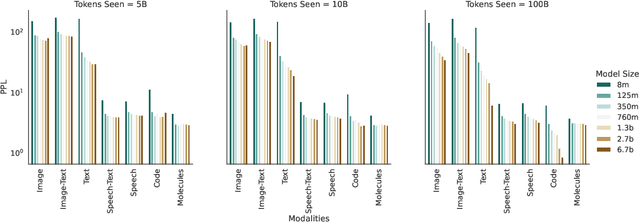
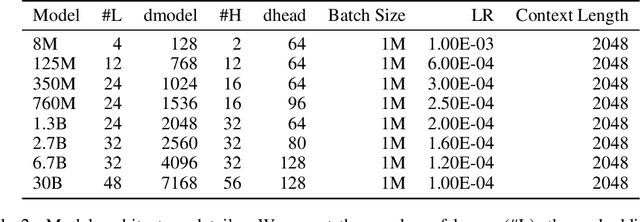
Generative language models define distributions over sequences of tokens that can represent essentially any combination of data modalities (e.g., any permutation of image tokens from VQ-VAEs, speech tokens from HuBERT, BPE tokens for language or code, and so on). To better understand the scaling properties of such mixed-modal models, we conducted over 250 experiments using seven different modalities and model sizes ranging from 8 million to 30 billion, trained on 5-100 billion tokens. We report new mixed-modal scaling laws that unify the contributions of individual modalities and the interactions between them. Specifically, we explicitly model the optimal synergy and competition due to data and model size as an additive term to previous uni-modal scaling laws. We also find four empirical phenomena observed during the training, such as emergent coordinate-ascent style training that naturally alternates between modalities, guidelines for selecting critical hyper-parameters, and connections between mixed-modal competition and training stability. Finally, we test our scaling law by training a 30B speech-text model, which significantly outperforms the corresponding unimodal models. Overall, our research provides valuable insights into the design and training of mixed-modal generative models, an important new class of unified models that have unique distributional properties.
OPT: Open Pre-trained Transformer Language Models
May 05, 2022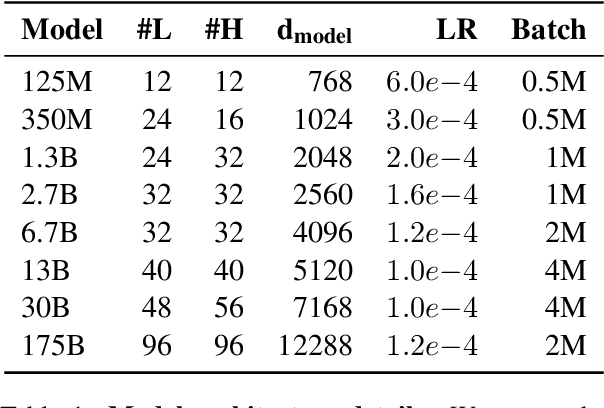
Large language models, which are often trained for hundreds of thousands of compute days, have shown remarkable capabilities for zero- and few-shot learning. Given their computational cost, these models are difficult to replicate without significant capital. For the few that are available through APIs, no access is granted to the full model weights, making them difficult to study. We present Open Pre-trained Transformers (OPT), a suite of decoder-only pre-trained transformers ranging from 125M to 175B parameters, which we aim to fully and responsibly share with interested researchers. We show that OPT-175B is comparable to GPT-3, while requiring only 1/7th the carbon footprint to develop. We are also releasing our logbook detailing the infrastructure challenges we faced, along with code for experimenting with all of the released models.
Long-Term Planning and Situational Awareness in OpenAI Five
Dec 13, 2019
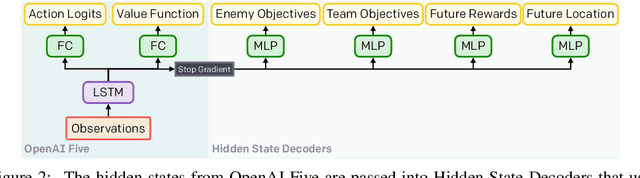
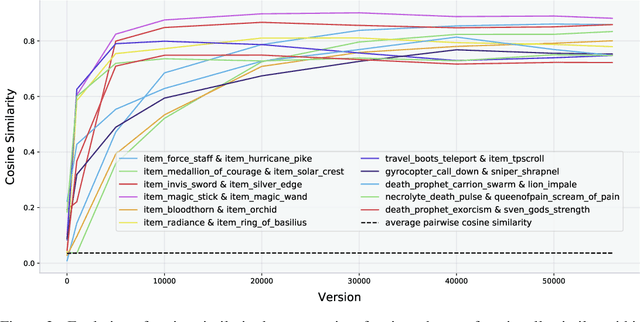
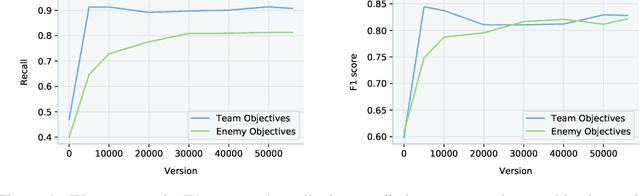
Understanding how knowledge about the world is represented within model-free deep reinforcement learning methods is a major challenge given the black box nature of its learning process within high-dimensional observation and action spaces. AlphaStar and OpenAI Five have shown that agents can be trained without any explicit hierarchical macro-actions to reach superhuman skill in games that require taking thousands of actions before reaching the final goal. Assessing the agent's plans and game understanding becomes challenging given the lack of hierarchy or explicit representations of macro-actions in these models, coupled with the incomprehensible nature of the internal representations. In this paper, we study the distributed representations learned by OpenAI Five to investigate how game knowledge is gradually obtained over the course of training. We also introduce a general technique for learning a model from the agent's hidden states to identify the formation of plans and subgoals. We show that the agent can learn situational similarity across actions, and find evidence of planning towards accomplishing subgoals minutes before they are executed. We perform a qualitative analysis of these predictions during the games against the DotA 2 world champions OG in April 2019.
Neural Network Surgery with Sets
Dec 13, 2019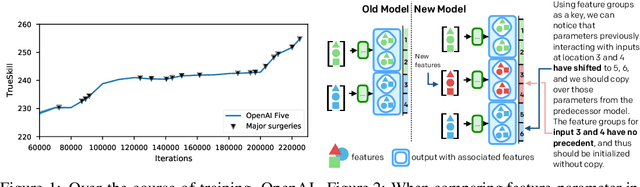
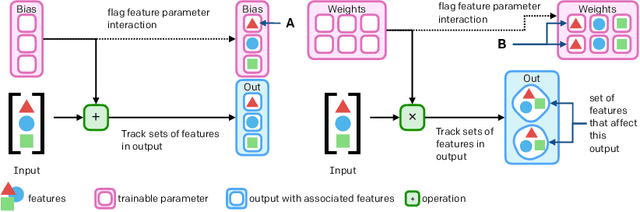

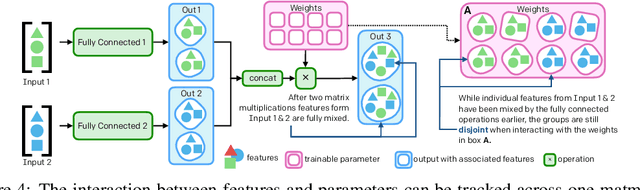
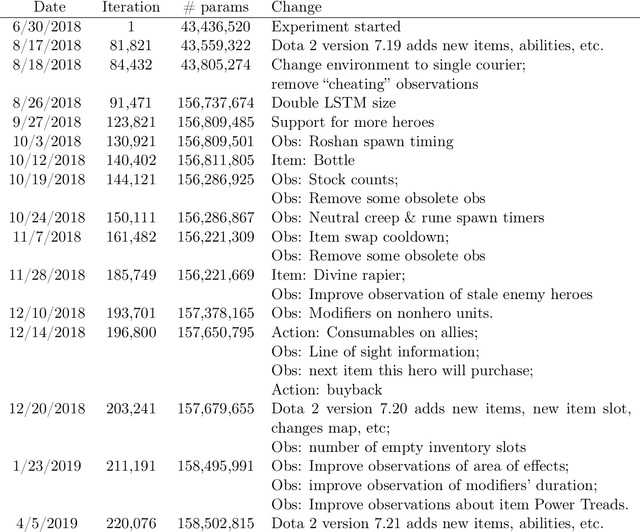
The cost to train machine learning models has been increasing exponentially, making exploration and research into the correct features and architecture a costly or intractable endeavor at scale. However, using a technique named "surgery" OpenAI Five was continuously trained to play the game DotA 2 over the course of 10 months through 20 major changes in features and architecture. Surgery transfers trained weights from one network to another after a selection process to determine which sections of the model are unchanged and which must be re-initialized. In the past, the selection process relied on heuristics, manual labor, or pre-existing boundaries in the structure of the model, limiting the ability to salvage experiments after modifications of the feature set or input reorderings. We propose a solution to automatically determine which components of a neural network model should be salvaged and which require retraining. We achieve this by allowing the model to operate over discrete sets of features and use set-based operations to determine the exact relationship between inputs and outputs, and how they change across tweaks in model architecture. In this paper, we introduce the methodology for enabling neural networks to operate on sets, derive two methods for detecting feature-parameter interaction maps, and show their equivalence. We empirically validate that we can surgery weights across feature and architecture changes to the OpenAI Five model.
Dota 2 with Large Scale Deep Reinforcement Learning
Dec 13, 2019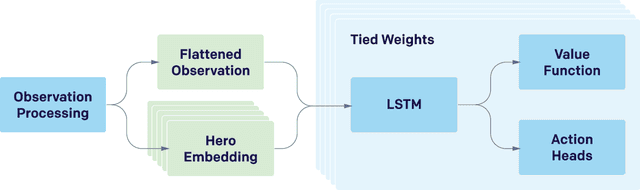
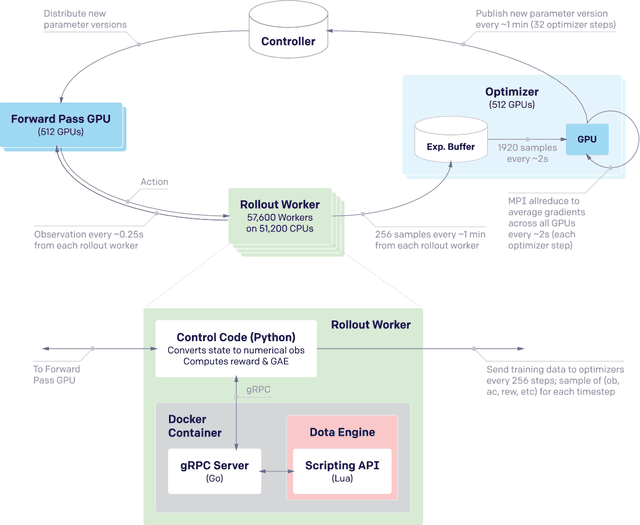
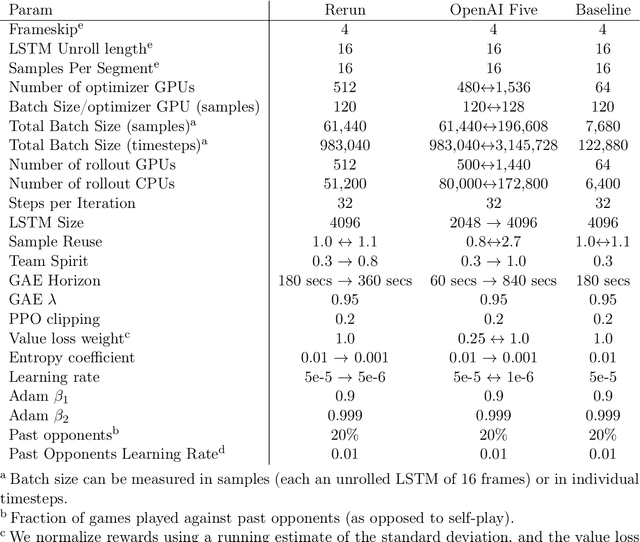
On April 13th, 2019, OpenAI Five became the first AI system to defeat the world champions at an esports game. The game of Dota 2 presents novel challenges for AI systems such as long time horizons, imperfect information, and complex, continuous state-action spaces, all challenges which will become increasingly central to more capable AI systems. OpenAI Five leveraged existing reinforcement learning techniques, scaled to learn from batches of approximately 2 million frames every 2 seconds. We developed a distributed training system and tools for continual training which allowed us to train OpenAI Five for 10 months. By defeating the Dota 2 world champion (Team OG), OpenAI Five demonstrates that self-play reinforcement learning can achieve superhuman performance on a difficult task.