 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Term Planning and Situational Awareness in OpenAI Five
Dec 13, 2019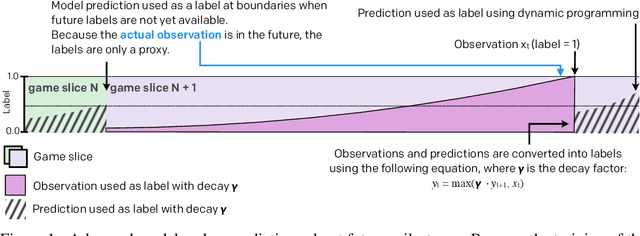
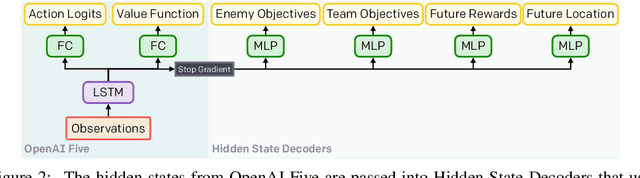
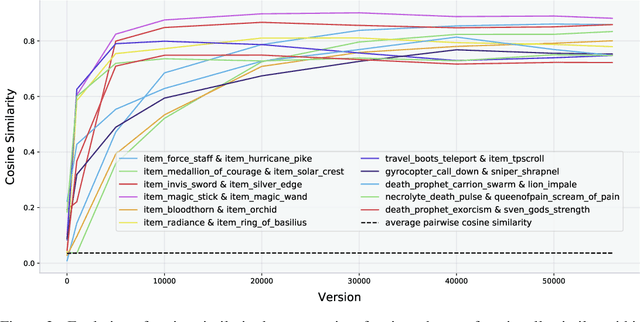
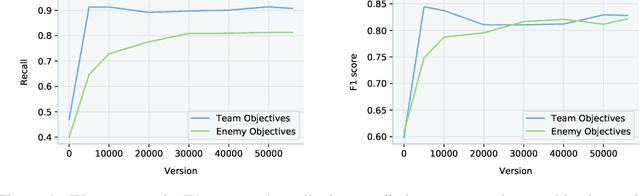
Understanding how knowledge about the world is represented within model-free deep reinforcement learning methods is a major challenge given the black box nature of its learning process within high-dimensional observation and action spaces. AlphaStar and OpenAI Five have shown that agents can be trained without any explicit hierarchical macro-actions to reach superhuman skill in games that require taking thousands of actions before reaching the final goal. Assessing the agent's plans and game understanding becomes challenging given the lack of hierarchy or explicit representations of macro-actions in these models, coupled with the incomprehensible nature of the internal representations. In this paper, we study the distributed representations learned by OpenAI Five to investigate how game knowledge is gradually obtained over the course of training. We also introduce a general technique for learning a model from the agent's hidden states to identify the formation of plans and subgoals. We show that the agent can learn situational similarity across actions, and find evidence of planning towards accomplishing subgoals minutes before they are executed. We perform a qualitative analysis of these predictions during the games against the DotA 2 world champions OG in April 2019.
Dota 2 with Large Scale Deep Reinforcement Learning
Dec 13, 2019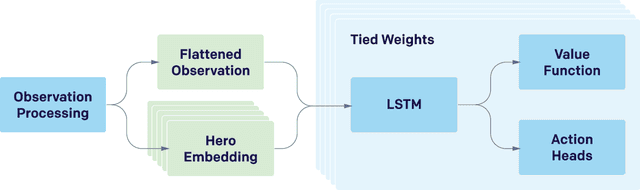
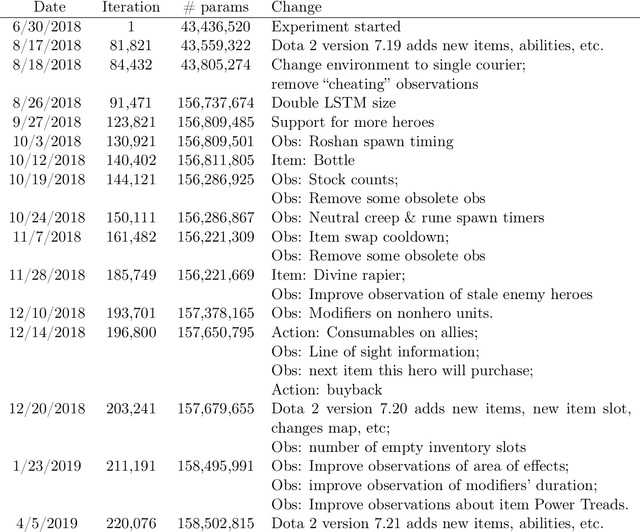
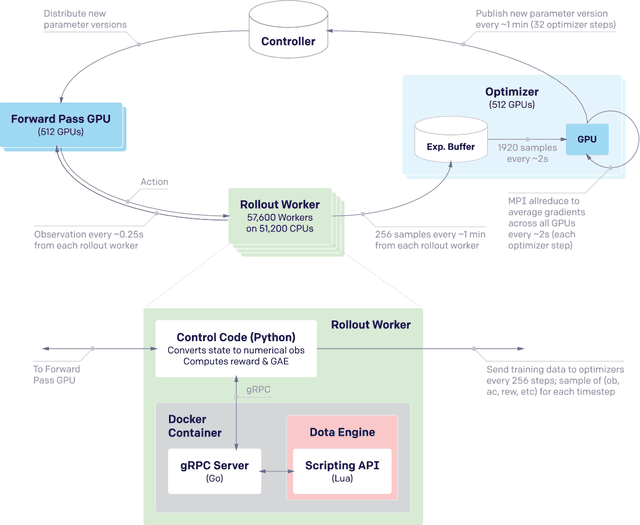
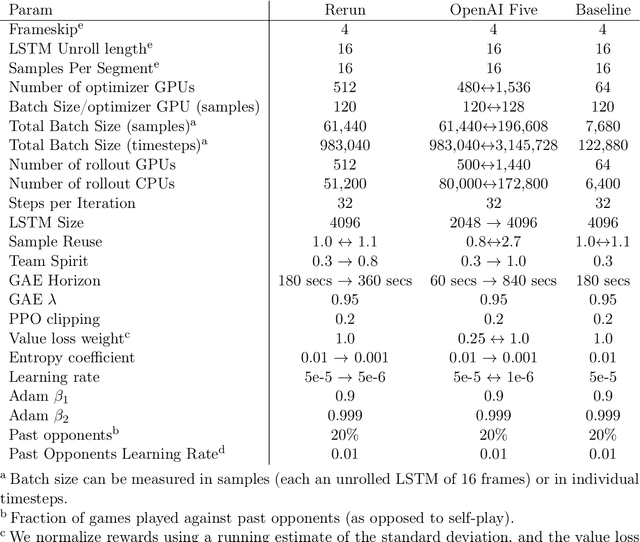
On April 13th, 2019, OpenAI Five became the first AI system to defeat the world champions at an esports game. The game of Dota 2 presents novel challenges for AI systems such as long time horizons, imperfect information, and complex, continuous state-action spaces, all challenges which will become increasingly central to more capable AI systems. OpenAI Five leveraged existing reinforcement learning techniques, scaled to learn from batches of approximately 2 million frames every 2 seconds. We developed a distributed training system and tools for continual training which allowed us to train OpenAI Five for 10 months. By defeating the Dota 2 world champion (Team OG), OpenAI Five demonstrates that self-play reinforcement learning can achieve superhuman performance on a difficult task.
Evolved Policy Gradients
Apr 29, 2018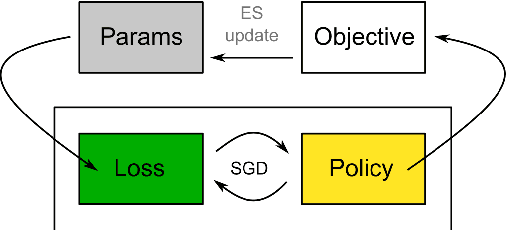
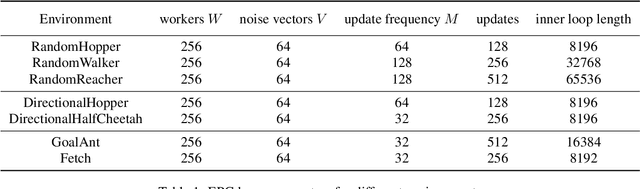
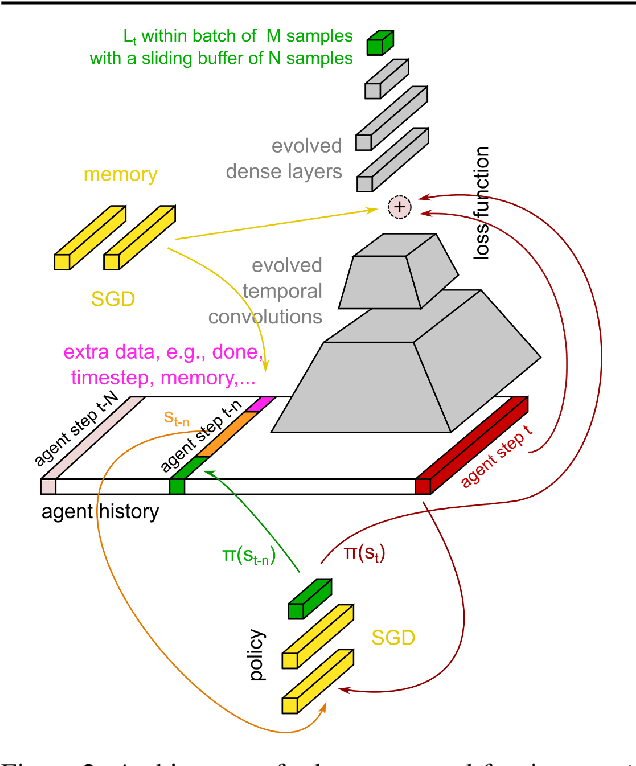
We propose a metalearning approach for learning gradient-based reinforcement learning (RL) algorithms. The idea is to evolve a differentiable loss function, such that an agent, which optimizes its policy to minimize this loss, will achieve high rewards. The loss is parametrized via temporal convolutions over the agent's experience. Because this loss is highly flexible in its ability to take into account the agent's history, it enables fast task learning. Empirical results show that our evolved policy gradient algorithm (EPG) achieves faster learning on several randomized environments compared to an off-the-shelf policy gradient method. We also demonstrate that EPG's learned loss can generalize to out-of-distribution test time tasks, and exhibits qualitatively different behavior from other popular metalearning algorithms.
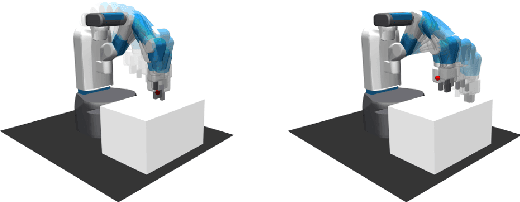
Hindsight Experience Replay
Feb 23, 2018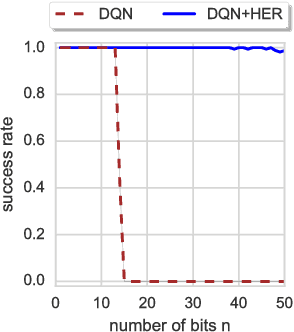
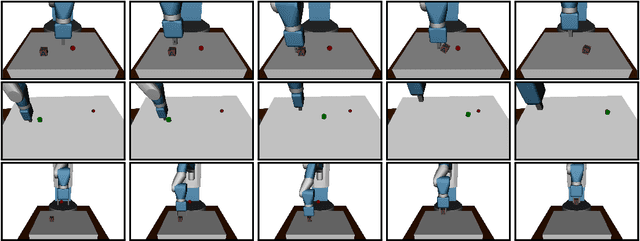
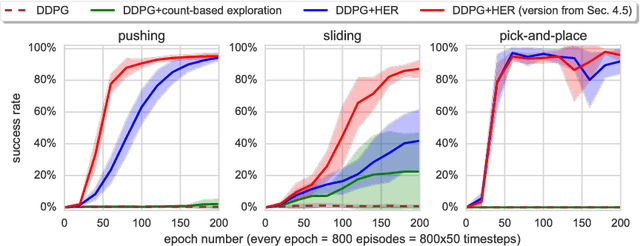
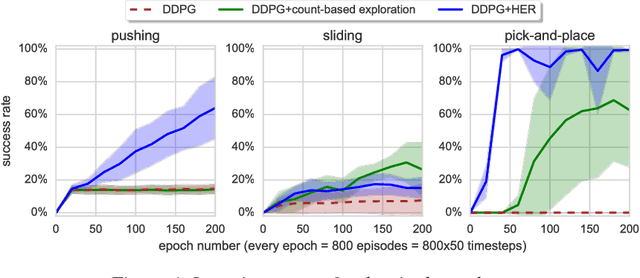
Dealing with sparse rewards is one of the biggest challenges in Reinforcement Learning (RL). We present a novel technique called Hindsight Experience Replay which allows sample-efficient learning from rewards which are sparse and binary and therefore avoid the need for complicated reward engineering. It can be combined with an arbitrary off-policy RL algorithm and may be seen as a form of implicit curriculum. We demonstrate our approach on the task of manipulating objects with a robotic arm. In particular, we run experiments on three different tasks: pushing, sliding, and pick-and-place, in each case using only binary rewards indicating whether or not the task is completed. Our ablation studies show that Hindsight Experience Replay is a crucial ingredient which makes training possible in these challenging environments. We show that our policies trained on a physics simulation can be deployed on a physical robot and successfully complete the task.
Proximal Policy Optimization Algorithms
Aug 28, 2017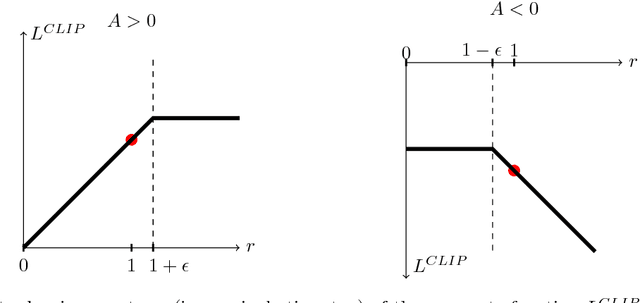
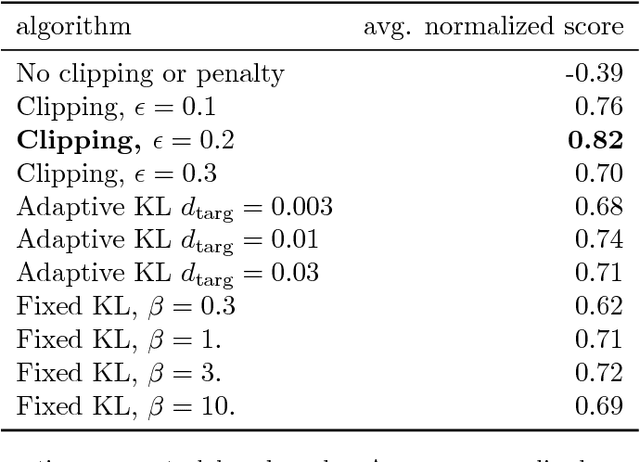
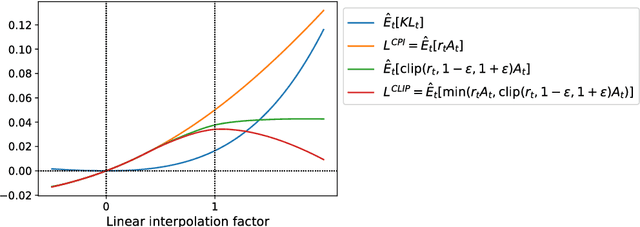

We propose a new family of policy gradient methods for reinforcement learning, which alternate between sampling data through interaction with the environment, and optimizing a "surrogate" objective function using stochastic gradient ascent. Whereas standard policy gradient methods perform one gradient update per data sample, we propose a novel objective function that enables multiple epochs of minibatch updates. The new methods, which we call proximal policy optimization (PPO), have some of the benefits of trust region policy optimization (TRPO), but they are much simpler to implement, more general, and have better sample complexity (empirically). Our experiments test PPO on a collection of benchmark tasks, including simulated robotic locomotion and Atari game playing, and we show that PPO outperforms other online policy gradient methods, and overall strikes a favorable balance between sample complexity, simplicity, and wall-time.