 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHindsight Experience Replay
Feb 23, 2018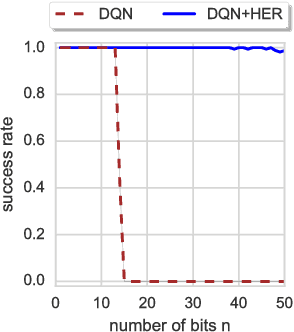
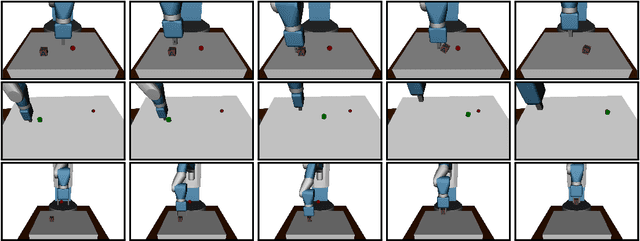
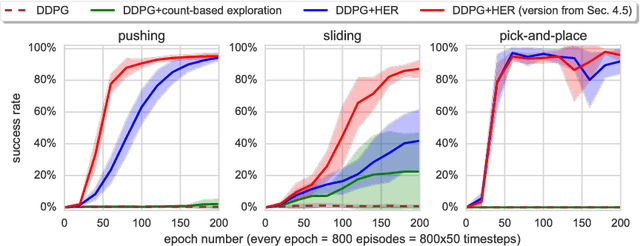
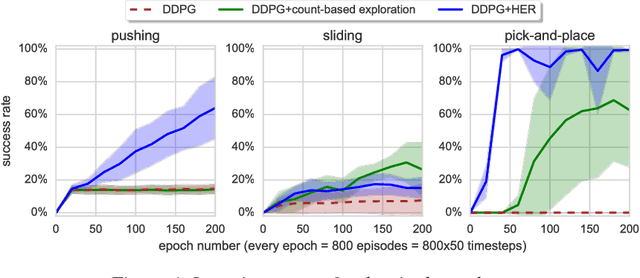
Dealing with sparse rewards is one of the biggest challenges in Reinforcement Learning (RL). We present a novel technique called Hindsight Experience Replay which allows sample-efficient learning from rewards which are sparse and binary and therefore avoid the need for complicated reward engineering. It can be combined with an arbitrary off-policy RL algorithm and may be seen as a form of implicit curriculum. We demonstrate our approach on the task of manipulating objects with a robotic arm. In particular, we run experiments on three different tasks: pushing, sliding, and pick-and-place, in each case using only binary rewards indicating whether or not the task is completed. Our ablation studies show that Hindsight Experience Replay is a crucial ingredient which makes training possible in these challenging environments. We show that our policies trained on a physics simulation can be deployed on a physical robot and successfully complete the task.
Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World
Mar 20, 2017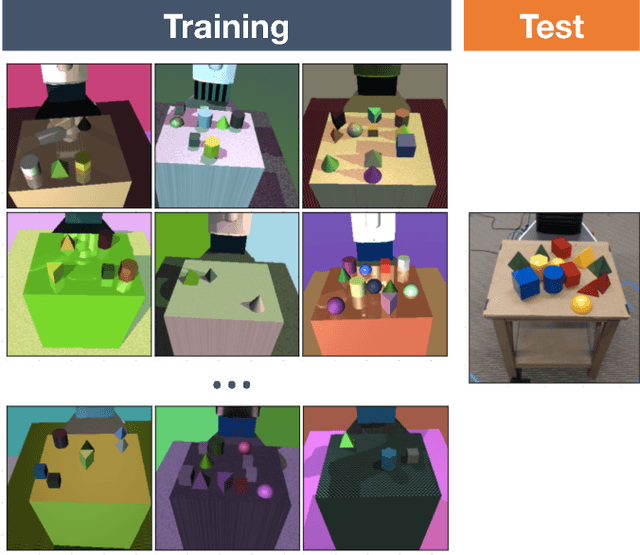
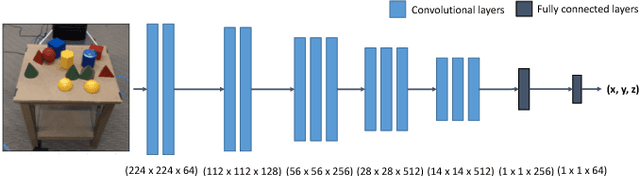
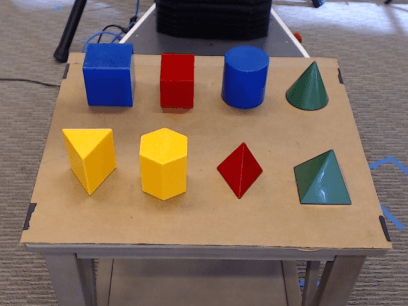
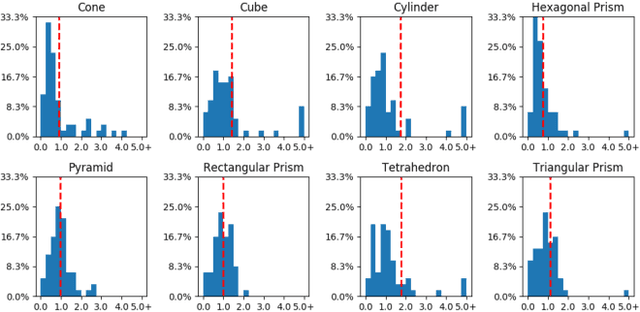
Bridging the 'reality gap' that separates simulated robotics from experiments on hardware could accelerate robotic research through improved data availability. This paper explores domain randomization, a simple technique for training models on simulated images that transfer to real images by randomizing rendering in the simulator. With enough variability in the simulator, the real world may appear to the model as just another variation. We focus on the task of object localization, which is a stepping stone to general robotic manipulation skills. We find that it is possible to train a real-world object detector that is accurate to $1.5$cm and robust to distractors and partial occlusions using only data from a simulator with non-realistic random textures. To demonstrate the capabilities of our detectors, we show they can be used to perform grasping in a cluttered environment. To our knowledge, this is the first successful transfer of a deep neural network trained only on simulated RGB images (without pre-training on real images) to the real world for the purpose of robotic control.