 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStress Testing Deliberative Alignment for Anti-Scheming Training
Sep 19, 2025



Highly capable AI systems could secretly pursue misaligned goals -- what we call "scheming". Because a scheming AI would deliberately try to hide its misaligned goals and actions, measuring and mitigating scheming requires different strategies than are typically used in ML. We propose that assessing anti-scheming interventions requires at least (1) testing propensity to scheme on far out-of-distribution (OOD) tasks, (2) evaluating whether lack of scheming is driven by situational awareness, and (3) checking for robustness to pre-existing misaligned goals. We use a broad category of "covert actions" -- such as secretly breaking rules or intentionally underperforming in tests -- as a proxy for scheming, and design evaluations for covert actions. We then stress-test deliberative alignment as a case study for anti-scheming. Across 26 OOD evaluations (180+ environments), deliberative alignment reduces covert action rates (OpenAI o3: 13%->0.4%) but does not fully eliminate them. Our mitigation is also able to largely stop agents from pursuing a hidden goal previously trained into the model, but we still find misbehavior after additional red-teaming. We find that models' chain-of-thought (CoT) often demonstrates awareness of being evaluated for alignment, and show causal evidence that this awareness decreases covert behavior, while unawareness increases it. Therefore, we cannot exclude that the observed reductions in covert action rates are at least partially driven by situational awareness. While we rely on human-legible CoT for training, studying situational awareness, and demonstrating clear evidence of misalignment, our ability to rely on this degrades as models continue to depart from reasoning in standard English. We encourage research into alignment mitigations for scheming and their assessment, especially for the adversarial case of deceptive alignment, which this paper does not address.
Chain of Thought Monitorability: A New and Fragile Opportunity for AI Safety
Jul 15, 2025
AI systems that "think" in human language offer a unique opportunity for AI safety: we can monitor their chains of thought (CoT) for the intent to misbehave. Like all other known AI oversight methods, CoT monitoring is imperfect and allows some misbehavior to go unnoticed. Nevertheless, it shows promise and we recommend further research into CoT monitorability and investment in CoT monitoring alongside existing safety methods. Because CoT monitorability may be fragile, we recommend that frontier model developers consider the impact of development decisions on CoT monitorability.
Monitoring Reasoning Models for Misbehavior and the Risks of Promoting Obfuscation
Mar 14, 2025Mitigating reward hacking--where AI systems misbehave due to flaws or misspecifications in their learning objectives--remains a key challenge in constructing capable and aligned models. We show that we can monitor a frontier reasoning model, such as OpenAI o3-mini, for reward hacking in agentic coding environments by using another LLM that observes the model's chain-of-thought (CoT) reasoning. CoT monitoring can be far more effective than monitoring agent actions and outputs alone, and we further found that a LLM weaker than o3-mini, namely GPT-4o, can effectively monitor a stronger model. Because CoT monitors can be effective at detecting exploits, it is natural to ask whether those exploits can be suppressed by incorporating a CoT monitor directly into the agent's training objective. While we show that integrating CoT monitors into the reinforcement learning reward can indeed produce more capable and more aligned agents in the low optimization regime, we find that with too much optimization, agents learn obfuscated reward hacking, hiding their intent within the CoT while still exhibiting a significant rate of reward hacking. Because it is difficult to tell when CoTs have become obfuscated, it may be necessary to pay a monitorability tax by not applying strong optimization pressures directly to the chain-of-thought, ensuring that CoTs remain monitorable and useful for detecting misaligned behavior.
Trading Inference-Time Compute for Adversarial Robustness
Jan 31, 2025



We conduct experiments on the impact of increasing inference-time compute in reasoning models (specifically OpenAI o1-preview and o1-mini) on their robustness to adversarial attacks. We find that across a variety of attacks, increased inference-time compute leads to improved robustness. In many cases (with important exceptions), the fraction of model samples where the attack succeeds tends to zero as the amount of test-time compute grows. We perform no adversarial training for the tasks we study, and we increase inference-time compute by simply allowing the models to spend more compute on reasoning, independently of the form of attack. Our results suggest that inference-time compute has the potential to improve adversarial robustness for Large Language Models. We also explore new attacks directed at reasoning models, as well as settings where inference-time compute does not improve reliability, and speculate on the reasons for these as well as ways to address them.
OpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
GPT-4o System Card
Oct 25, 2024GPT-4o is an autoregressive omni model that accepts as input any combination of text, audio, image, and video, and generates any combination of text, audio, and image outputs. It's trained end-to-end across text, vision, and audio, meaning all inputs and outputs are processed by the same neural network. GPT-4o can respond to audio inputs in as little as 232 milliseconds, with an average of 320 milliseconds, which is similar to human response time in conversation. It matches GPT-4 Turbo performance on text in English and code, with significant improvement on text in non-English languages, while also being much faster and 50\% cheaper in the API. GPT-4o is especially better at vision and audio understanding compared to existing models. In line with our commitment to building AI safely and consistent with our voluntary commitments to the White House, we are sharing the GPT-4o System Card, which includes our Preparedness Framework evaluations. In this System Card, we provide a detailed look at GPT-4o's capabilities, limitations, and safety evaluations across multiple categories, focusing on speech-to-speech while also evaluating text and image capabilities, and measures we've implemented to ensure the model is safe and aligned. We also include third-party assessments on dangerous capabilities, as well as discussion of potential societal impacts of GPT-4o's text and vision capabilities.
Evaluating Large Language Models Trained on Code
Jul 14, 2021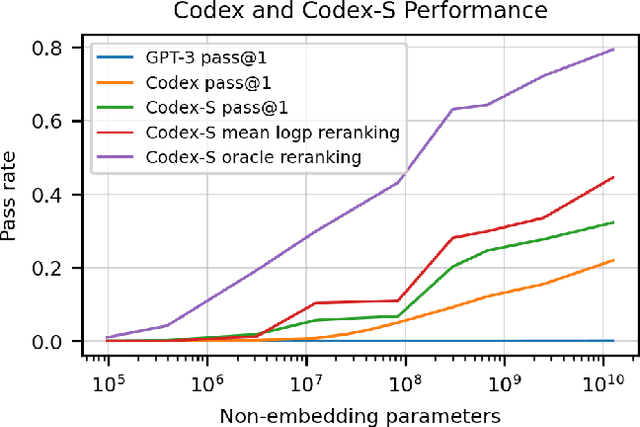
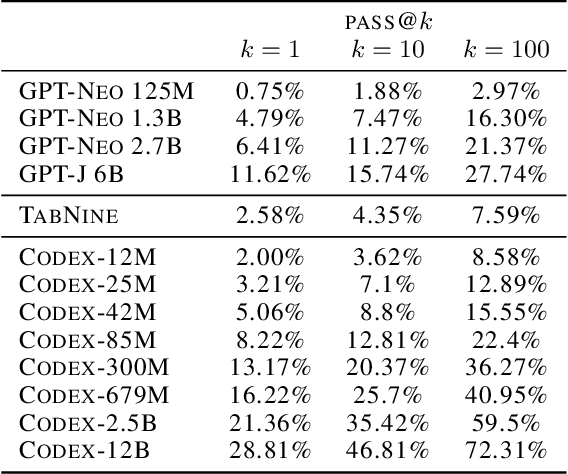
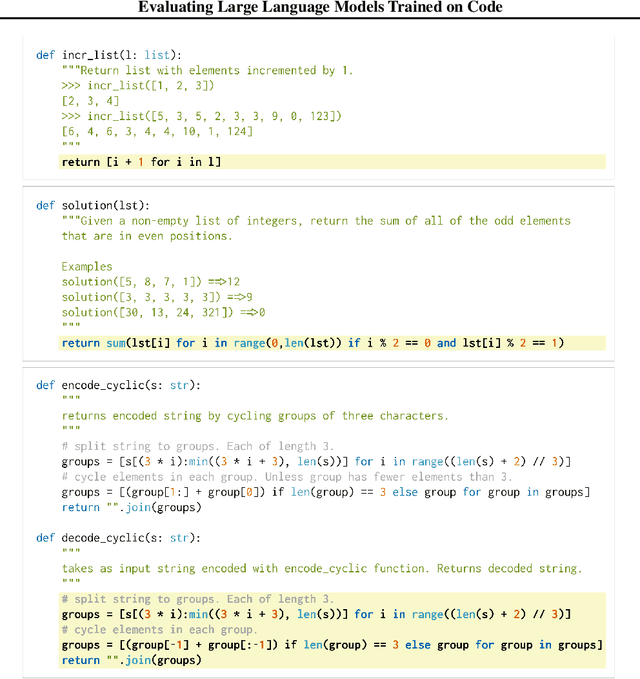
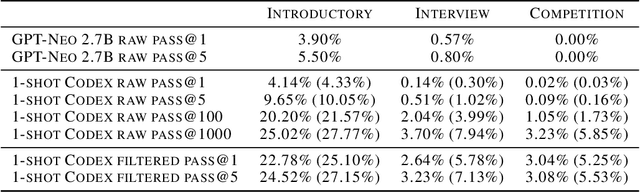
We introduce Codex, a GPT language model fine-tuned on publicly available code from GitHub, and study its Python code-writing capabilities. A distinct production version of Codex powers GitHub Copilot. On HumanEval, a new evaluation set we release to measure functional correctness for synthesizing programs from docstrings, our model solves 28.8% of the problems, while GPT-3 solves 0% and GPT-J solves 11.4%. Furthermore, we find that repeated sampling from the model is a surprisingly effective strategy for producing working solutions to difficult prompts. Using this method, we solve 70.2% of our problems with 100 samples per problem. Careful investigation of our model reveals its limitations, including difficulty with docstrings describing long chains of operations and with binding operations to variables. Finally, we discuss the potential broader impacts of deploying powerful code generation technologies, covering safety, security, and economics.
A Generalizable Approach to Learning Optimizers
Jun 07, 2021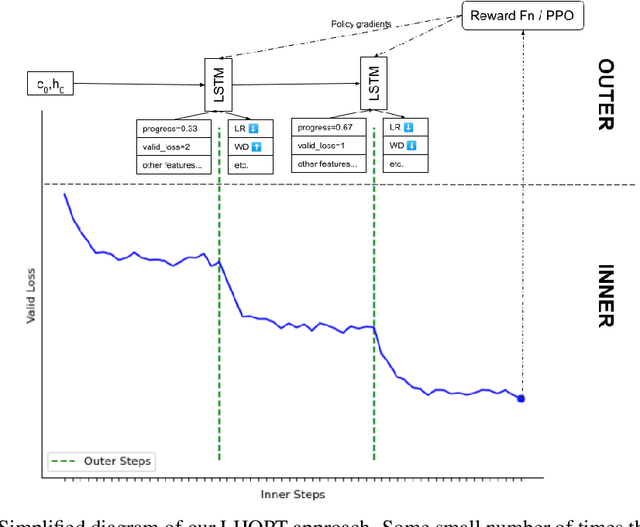
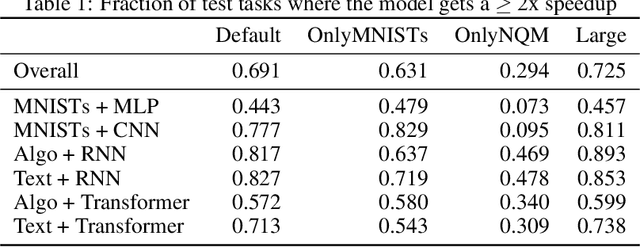
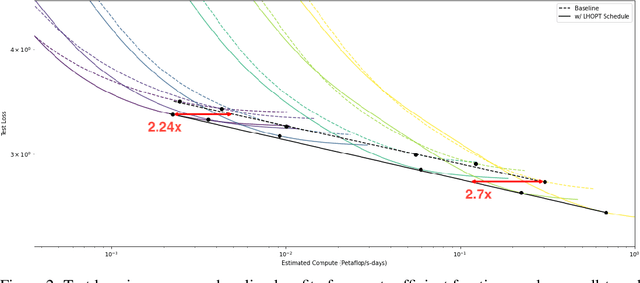
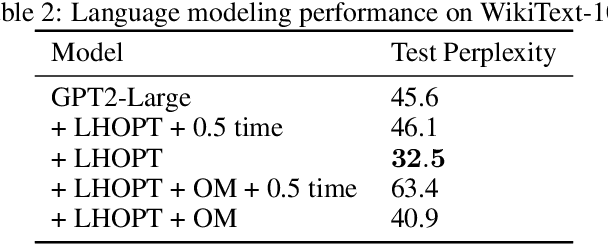
A core issue with learning to optimize neural networks has been the lack of generalization to real world problems. To address this, we describe a system designed from a generalization-first perspective, learning to update optimizer hyperparameters instead of model parameters directly using novel features, actions, and a reward function. This system outperforms Adam at all neural network tasks including on modalities not seen during training. We achieve 2x speedups on ImageNet, and a 2.5x speedup on a language modeling task using over 5 orders of magnitude more compute than the training tasks.
Asymmetric self-play for automatic goal discovery in robotic manipulation
Jan 13, 2021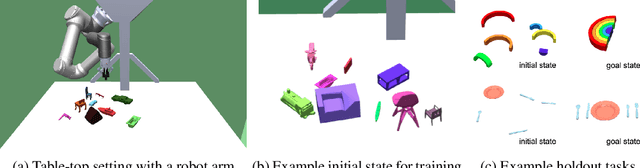
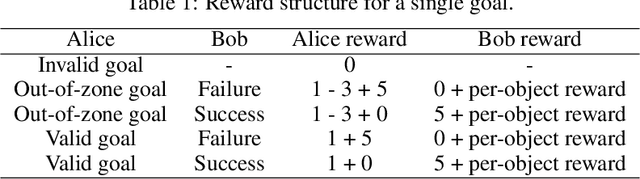
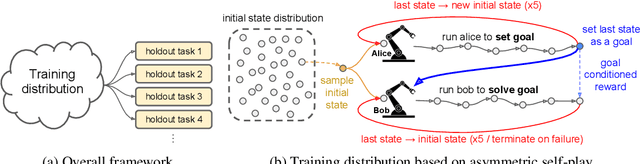
We train a single, goal-conditioned policy that can solve many robotic manipulation tasks, including tasks with previously unseen goals and objects. We rely on asymmetric self-play for goal discovery, where two agents, Alice and Bob, play a game. Alice is asked to propose challenging goals and Bob aims to solve them. We show that this method can discover highly diverse and complex goals without any human priors. Bob can be trained with only sparse rewards, because the interaction between Alice and Bob results in a natural curriculum and Bob can learn from Alice's trajectory when relabeled as a goal-conditioned demonstration. Finally, our method scales, resulting in a single policy that can generalize to many unseen tasks such as setting a table, stacking blocks, and solving simple puzzles. Videos of a learned policy is available at https://robotics-self-play.github.io.
Predicting Sim-to-Real Transfer with Probabilistic Dynamics Models
Sep 27, 2020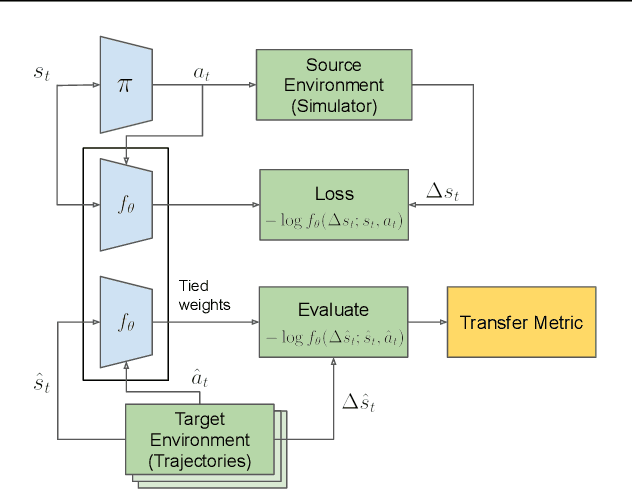
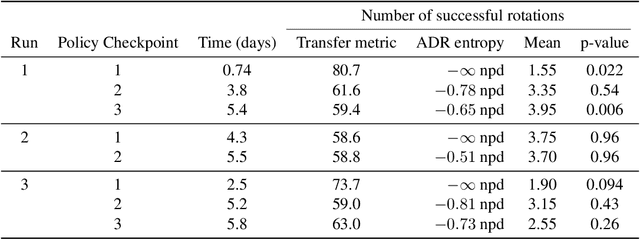
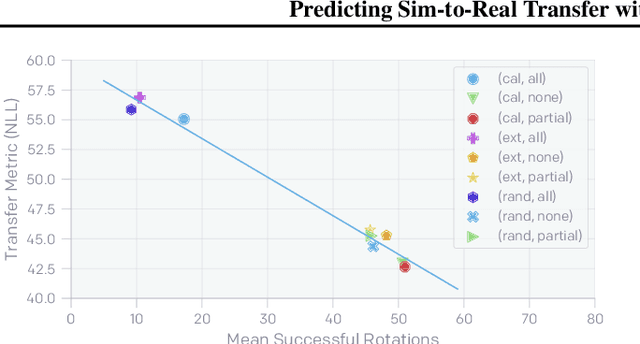
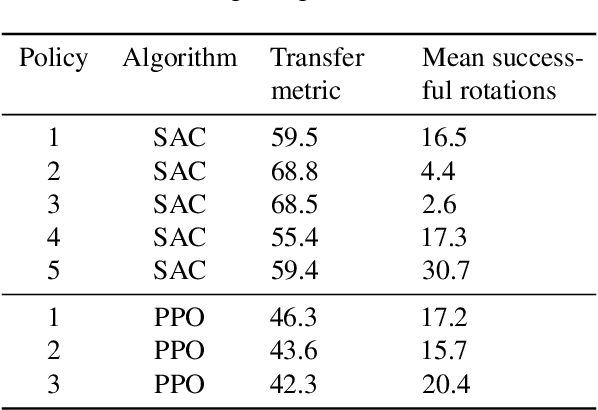
We propose a method to predict the sim-to-real transfer performance of RL policies. Our transfer metric simplifies the selection of training setups (such as algorithm, hyperparameters, randomizations) and policies in simulation, without the need for extensive and time-consuming real-world rollouts. A probabilistic dynamics model is trained alongside the policy and evaluated on a fixed set of real-world trajectories to obtain the transfer metric. Experiments show that the transfer metric is highly correlated with policy performance in both simulated and real-world robotic environments for complex manipulation tasks. We further show that the transfer metric can predict the effect of training setups on policy transfer performance.