 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry-Aware Neural Rendering
Oct 28, 2019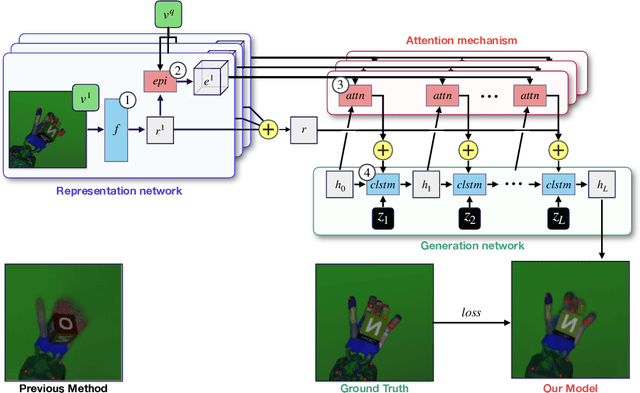
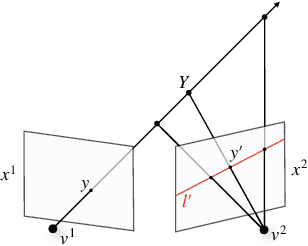
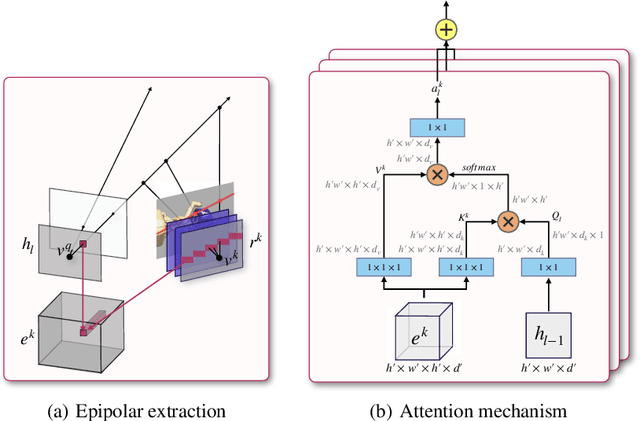
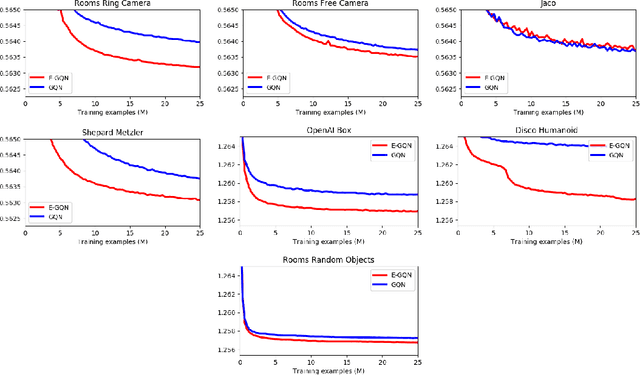
Understanding the 3-dimensional structure of the world is a core challenge in computer vision and robotics. Neural rendering approaches learn an implicit 3D model by predicting what a camera would see from an arbitrary viewpoint. We extend existing neural rendering to more complex, higher dimensional scenes than previously possible. We propose Epipolar Cross Attention (ECA), an attention mechanism that leverages the geometry of the scene to perform efficient non-local operations, requiring only $O(n)$ comparisons per spatial dimension instead of $O(n^2)$. We introduce three new simulated datasets inspired by real-world robotics and demonstrate that ECA significantly improves the quantitative and qualitative performance of Generative Query Networks (GQN).
* 16 pages, 13 figures
Learning Dexterous In-Hand Manipulation
Jan 18, 2019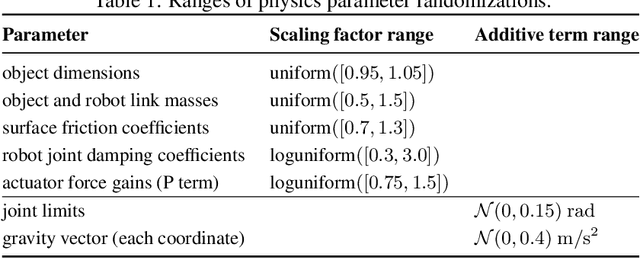
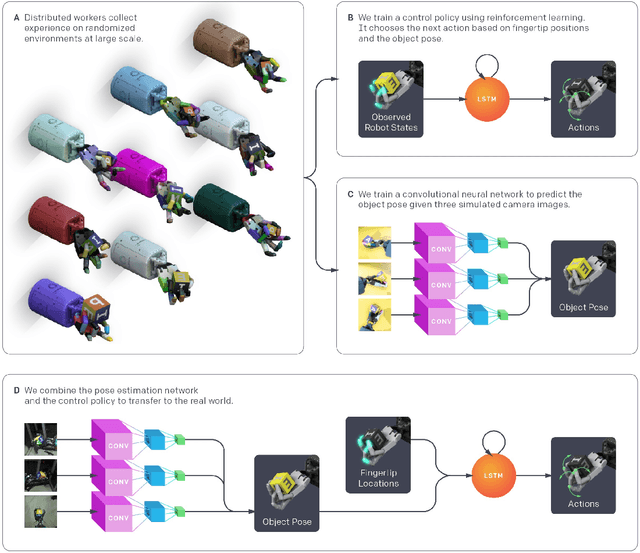
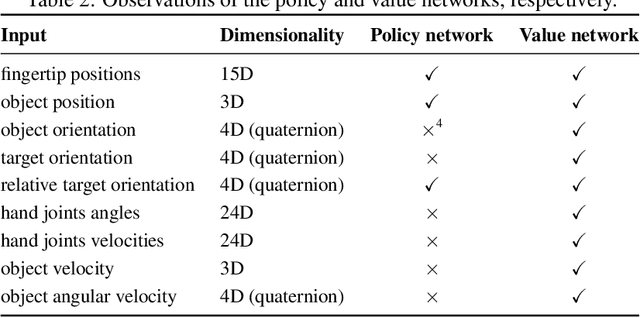
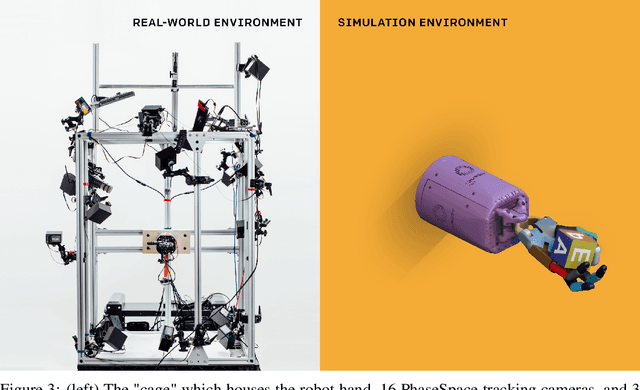
We use reinforcement learning (RL) to learn dexterous in-hand manipulation policies which can perform vision-based object reorientation on a physical Shadow Dexterous Hand. The training is performed in a simulated environment in which we randomize many of the physical properties of the system like friction coefficients and an object's appearance. Our policies transfer to the physical robot despite being trained entirely in simulation. Our method does not rely on any human demonstrations, but many behaviors found in human manipulation emerge naturally, including finger gaiting, multi-finger coordination, and the controlled use of gravity. Our results were obtained using the same distributed RL system that was used to train OpenAI Five. We also include a video of our results: https://youtu.be/jwSbzNHGflM
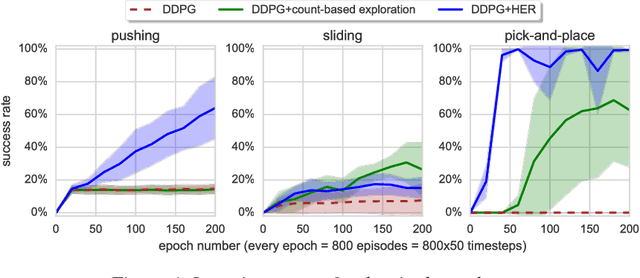
Multi-Goal Reinforcement Learning: Challenging Robotics Environments and Request for Research
Mar 10, 2018
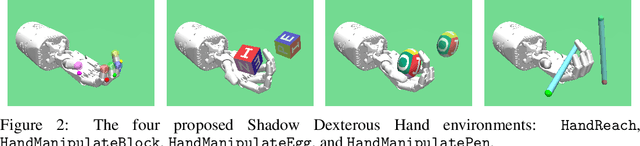
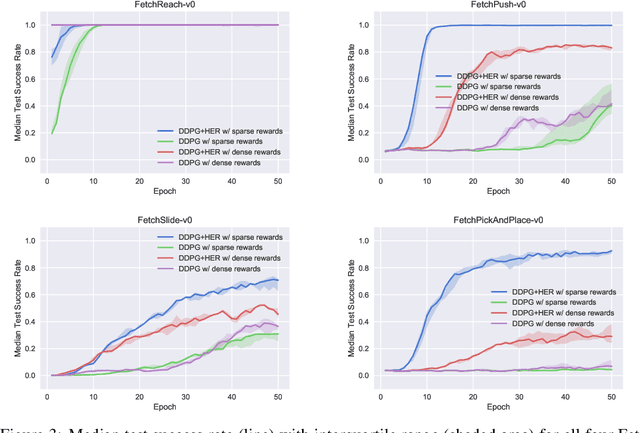
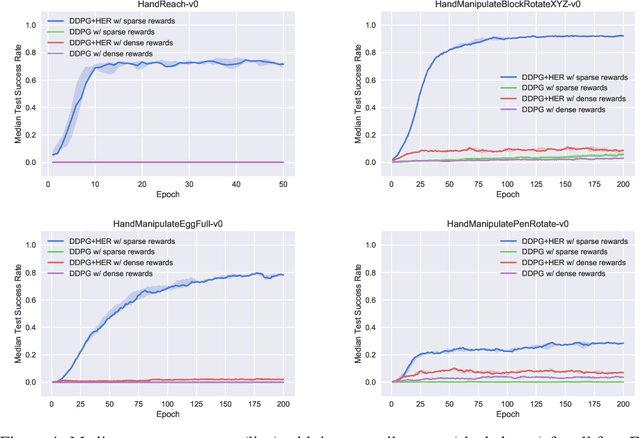
The purpose of this technical report is two-fold. First of all, it introduces a suite of challenging continuous control tasks (integrated with OpenAI Gym) based on currently existing robotics hardware. The tasks include pushing, sliding and pick & place with a Fetch robotic arm as well as in-hand object manipulation with a Shadow Dexterous Hand. All tasks have sparse binary rewards and follow a Multi-Goal Reinforcement Learning (RL) framework in which an agent is told what to do using an additional input. The second part of the paper presents a set of concrete research ideas for improving RL algorithms, most of which are related to Multi-Goal RL and Hindsight Experience Replay.
Hindsight Experience Replay
Feb 23, 2018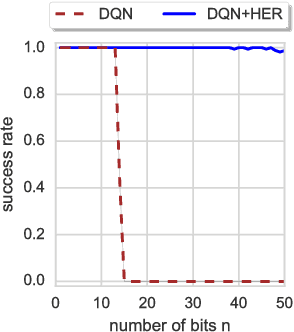
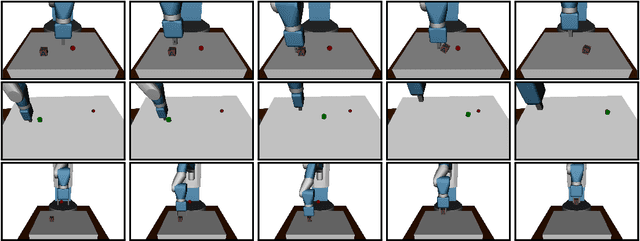
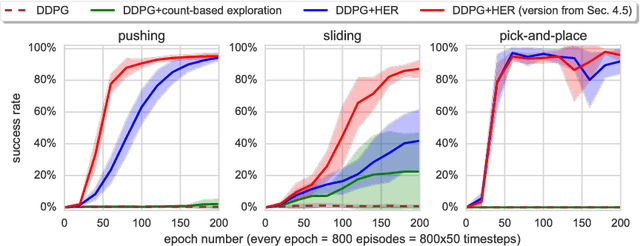
Dealing with sparse rewards is one of the biggest challenges in Reinforcement Learning (RL). We present a novel technique called Hindsight Experience Replay which allows sample-efficient learning from rewards which are sparse and binary and therefore avoid the need for complicated reward engineering. It can be combined with an arbitrary off-policy RL algorithm and may be seen as a form of implicit curriculum. We demonstrate our approach on the task of manipulating objects with a robotic arm. In particular, we run experiments on three different tasks: pushing, sliding, and pick-and-place, in each case using only binary rewards indicating whether or not the task is completed. Our ablation studies show that Hindsight Experience Replay is a crucial ingredient which makes training possible in these challenging environments. We show that our policies trained on a physics simulation can be deployed on a physical robot and successfully complete the task.
Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World
Mar 20, 2017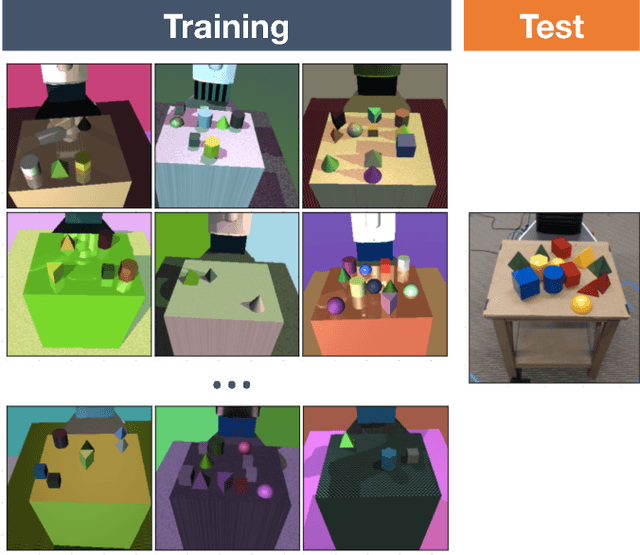
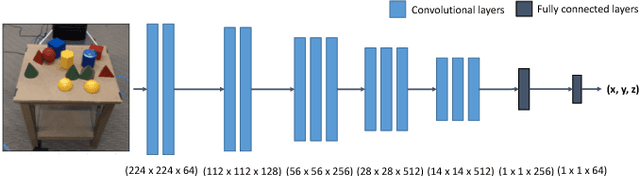
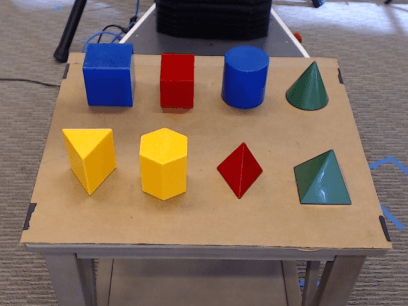
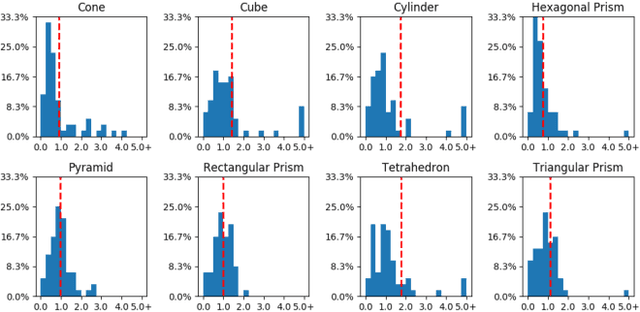
Bridging the 'reality gap' that separates simulated robotics from experiments on hardware could accelerate robotic research through improved data availability. This paper explores domain randomization, a simple technique for training models on simulated images that transfer to real images by randomizing rendering in the simulator. With enough variability in the simulator, the real world may appear to the model as just another variation. We focus on the task of object localization, which is a stepping stone to general robotic manipulation skills. We find that it is possible to train a real-world object detector that is accurate to $1.5$cm and robust to distractors and partial occlusions using only data from a simulator with non-realistic random textures. To demonstrate the capabilities of our detectors, we show they can be used to perform grasping in a cluttered environment. To our knowledge, this is the first successful transfer of a deep neural network trained only on simulated RGB images (without pre-training on real images) to the real world for the purpose of robotic control.