 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoRefine: From Trajectories to Reusable Expertise for Continual LLM Agent Refinement
Jan 30, 2026Large language model agents often fail to accumulate knowledge from experience, treating each task as an independent challenge. Recent methods extract experience as flattened textual knowledge, which cannot capture procedural logic of complex subtasks. They also lack maintenance mechanisms, causing repository degradation as experience accumulates. We introduce AutoRefine, a framework that extracts and maintains dual-form Experience Patterns from agent execution histories. For procedural subtasks, we extract specialized subagents with independent reasoning and memory. For static knowledge, we extract skill patterns as guidelines or code snippets. A continuous maintenance mechanism scores, prunes, and merges patterns to prevent repository degradation. Evaluated on ALFWorld, ScienceWorld, and TravelPlanner, AutoRefine achieves 98.4%, 70.4%, and 27.1% respectively, with 20-73% step reductions. On TravelPlanner, automatic extraction exceeds manually designed systems (27.1% vs 12.1%), demonstrating its ability to capture procedural coordination.
The Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
Scaling Reinforcement Learning for Content Moderation with Large Language Models
Dec 23, 2025
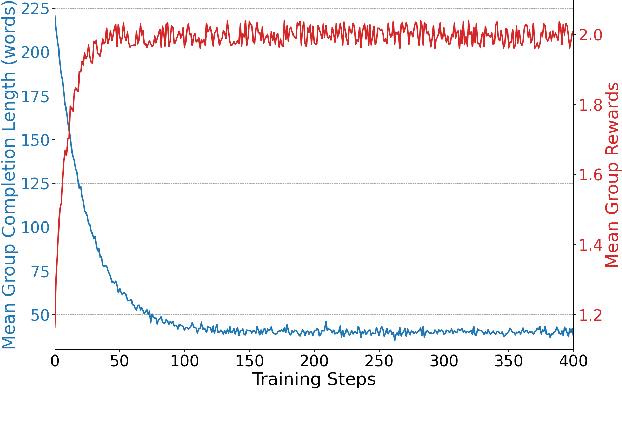
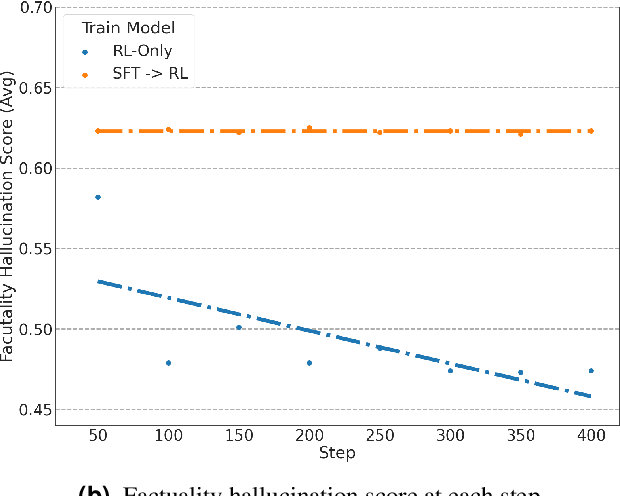
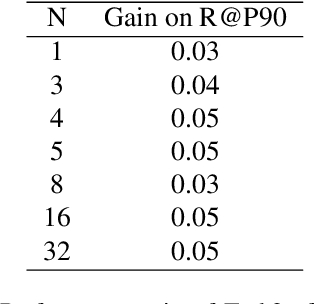
Content moderation at scale remains one of the most pressing challenges in today's digital ecosystem, where billions of user- and AI-generated artifacts must be continuously evaluated for policy violations. Although recent advances in large language models (LLMs) have demonstrated strong potential for policy-grounded moderation, the practical challenges of training these systems to achieve expert-level accuracy in real-world settings remain largely unexplored, particularly in regimes characterized by label sparsity, evolving policy definitions, and the need for nuanced reasoning beyond shallow pattern matching. In this work, we present a comprehensive empirical investigation of scaling reinforcement learning (RL) for content classification, systematically evaluating multiple RL training recipes and reward-shaping strategies-including verifiable rewards and LLM-as-judge frameworks-to transform general-purpose language models into specialized, policy-aligned classifiers across three real-world content moderation tasks. Our findings provide actionable insights for industrial-scale moderation systems, demonstrating that RL exhibits sigmoid-like scaling behavior in which performance improves smoothly with increased training data, rollouts, and optimization steps before gradually saturating. Moreover, we show that RL substantially improves performance on tasks requiring complex policy-grounded reasoning while achieving up to 100x higher data efficiency than supervised fine-tuning, making it particularly effective in domains where expert annotations are scarce or costly.
Selecting Auxiliary Data via Neural Tangent Kernels for Low-Resource Domains
Nov 10, 2025Large language models (LLMs) have achieved remarkable success across widespread tasks, yet their application in low-resource domains remains a significant challenge due to data scarcity and the high risk of overfitting. While in-domain data is limited, there exist vast amounts of similar general-domain data, and our initial findings reveal that they could potentially serve as auxiliary supervision for domain enhancement. This observation leads us to our central research question: \textbf{\textit{how to effectively select the most valuable auxiliary data to maximize domain-specific performance}}, particularly when traditional methods are inapplicable due to a lack of large in-domain data pools or validation sets. To address this, we propose \textbf{NTK-Selector}, a principled and efficient framework for selecting general-domain auxiliary data to enhance domain-specific performance via neural tangent kernels (NTK). Our method tackles two challenges of directly applying NTK to LLMs, theoretical assumptions and prohibitive computational cost, by empirically demonstrating a stable NTK-like behavior in LLMs during LoRA fine-tuning and proposing a Jacobian-free approximation method. Extensive experiments across four low-resource domains (medical, financial, legal, and psychological) demonstrate that NTK-Selector consistently improves downstream performance. Specifically, fine-tuning on 1,000 in-domain samples alone only yielded +0.8 points for Llama3-8B-Instruct and +0.9 points for Qwen3-8B. In contrast, enriching with 9,000 auxiliary samples selected by NTK-Selector led to substantial \textbf{gains of +8.7 and +5.1 points}, which corresponds to a \textbf{10.9x and 5.7x improvement} over the domain-only setting.
InfoMosaic-Bench: Evaluating Multi-Source Information Seeking in Tool-Augmented Agents
Oct 02, 2025Information seeking is a fundamental requirement for humans. However, existing LLM agents rely heavily on open-web search, which exposes two fundamental weaknesses: online content is noisy and unreliable, and many real-world tasks require precise, domain-specific knowledge unavailable from the web. The emergence of the Model Context Protocol (MCP) now allows agents to interface with thousands of specialized tools, seemingly resolving this limitation. Yet it remains unclear whether agents can effectively leverage such tools -- and more importantly, whether they can integrate them with general-purpose search to solve complex tasks. Therefore, we introduce InfoMosaic-Bench, the first benchmark dedicated to multi-source information seeking in tool-augmented agents. Covering six representative domains (medicine, finance, maps, video, web, and multi-domain integration), InfoMosaic-Bench requires agents to combine general-purpose search with domain-specific tools. Tasks are synthesized with InfoMosaic-Flow, a scalable pipeline that grounds task conditions in verified tool outputs, enforces cross-source dependencies, and filters out shortcut cases solvable by trivial lookup. This design guarantees both reliability and non-triviality. Experiments with 14 state-of-the-art LLM agents reveal three findings: (i) web information alone is insufficient, with GPT-5 achieving only 38.2% accuracy and 67.5% pass rate; (ii) domain tools provide selective but inconsistent benefits, improving some domains while degrading others; and (iii) 22.4% of failures arise from incorrect tool usage or selection, highlighting that current LLMs still struggle with even basic tool handling.
BrowseMaster: Towards Scalable Web Browsing via Tool-Augmented Programmatic Agent Pair
Aug 12, 2025Effective information seeking in the vast and ever-growing digital landscape requires balancing expansive search with strategic reasoning. Current large language model (LLM)-based agents struggle to achieve this balance due to limitations in search breadth and reasoning depth, where slow, serial querying restricts coverage of relevant sources and noisy raw inputs disrupt the continuity of multi-step reasoning. To address these challenges, we propose BrowseMaster, a scalable framework built around a programmatically augmented planner-executor agent pair. The planner formulates and adapts search strategies based on task constraints, while the executor conducts efficient, targeted retrieval to supply the planner with concise, relevant evidence. This division of labor preserves coherent, long-horizon reasoning while sustaining broad and systematic exploration, overcoming the trade-off that limits existing agents. Extensive experiments on challenging English and Chinese benchmarks show that BrowseMaster consistently outperforms open-source and proprietary baselines, achieving scores of 30.0 on BrowseComp-en and 46.5 on BrowseComp-zh, which demonstrates its strong capability in complex, reasoning-heavy information-seeking tasks at scale.
MeteorPred: A Meteorological Multimodal Large Model and Dataset for Severe Weather Event Prediction
Aug 09, 2025Timely and accurate severe weather warnings are critical for disaster mitigation. However, current forecasting systems remain heavily reliant on manual expert interpretation, introducing subjectivity and significant operational burdens. With the rapid development of AI technologies, the end-to-end "AI weather station" is gradually emerging as a new trend in predicting severe weather events. Three core challenges impede the development of end-to-end AI severe weather system: (1) scarcity of severe weather event samples; (2) imperfect alignment between high-dimensional meteorological data and textual warnings; (3) existing multimodal language models are unable to handle high-dimensional meteorological data and struggle to fully capture the complex dependencies across temporal sequences, vertical pressure levels, and spatial dimensions. To address these challenges, we introduce MP-Bench, the first large-scale temporal multimodal dataset for severe weather events prediction, comprising 421,363 pairs of raw multi-year meteorological data and corresponding text caption, covering a wide range of severe weather scenarios across China. On top of this dataset, we develop a meteorology multimodal large model (MMLM) that directly ingests 4D meteorological inputs. In addition, it is designed to accommodate the unique characteristics of 4D meteorological data flow, incorporating three plug-and-play adaptive fusion modules that enable dynamic feature extraction and integration across temporal sequences, vertical pressure layers, and spatial dimensions. Extensive experiments on MP-Bench demonstrate that MMLM performs exceptionally well across multiple tasks, highlighting its effectiveness in severe weather understanding and marking a key step toward realizing automated, AI-driven weather forecasting systems. Our source code and dataset will be made publicly available.
ML-Agent: Reinforcing LLM Agents for Autonomous Machine Learning Engineering
May 29, 2025The emergence of large language model (LLM)-based agents has significantly advanced the development of autonomous machine learning (ML) engineering. However, most existing approaches rely heavily on manual prompt engineering, failing to adapt and optimize based on diverse experimental experiences. Focusing on this, for the first time, we explore the paradigm of learning-based agentic ML, where an LLM agent learns through interactive experimentation on ML tasks using online reinforcement learning (RL). To realize this, we propose a novel agentic ML training framework with three key components: (1) exploration-enriched fine-tuning, which enables LLM agents to generate diverse actions for enhanced RL exploration; (2) step-wise RL, which enables training on a single action step, accelerating experience collection and improving training efficiency; (3) an agentic ML-specific reward module, which unifies varied ML feedback signals into consistent rewards for RL optimization. Leveraging this framework, we train ML-Agent, driven by a 7B-sized Qwen-2.5 LLM for autonomous ML. Remarkably, despite being trained on merely 9 ML tasks, our 7B-sized ML-Agent outperforms the 671B-sized DeepSeek-R1 agent. Furthermore, it achieves continuous performance improvements and demonstrates exceptional cross-task generalization capabilities.
MAS-GPT: Training LLMs to Build LLM-based Multi-Agent Systems
Mar 05, 2025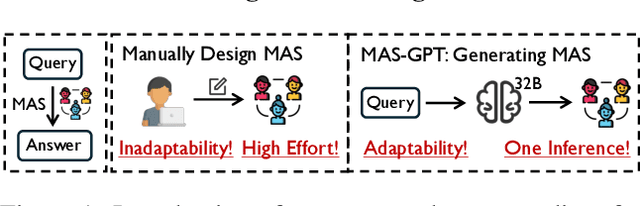
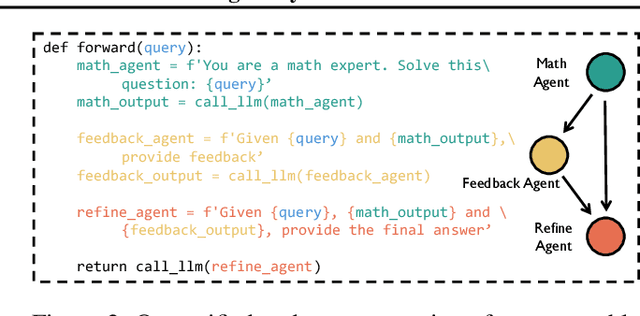
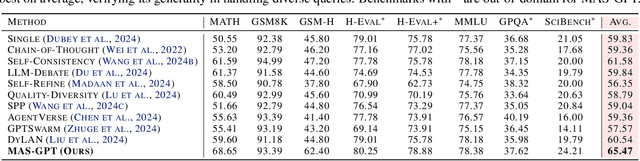
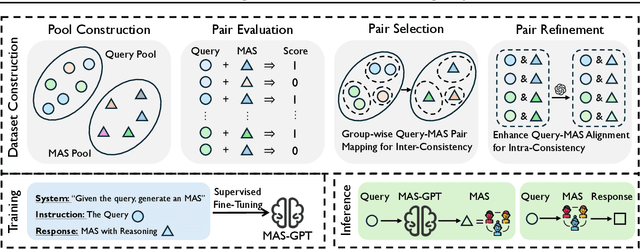
LLM-based multi-agent systems (MAS) have shown significant potential in tackling diverse tasks. However, to design effective MAS, existing approaches heavily rely on manual configurations or multiple calls of advanced LLMs, resulting in inadaptability and high inference costs. In this paper, we simplify the process of building an MAS by reframing it as a generative language task, where the input is a user query and the output is a corresponding MAS. To address this novel task, we unify the representation of MAS as executable code and propose a consistency-oriented data construction pipeline to create a high-quality dataset comprising coherent and consistent query-MAS pairs. Using this dataset, we train MAS-GPT, an open-source medium-sized LLM that is capable of generating query-adaptive MAS within a single LLM inference. The generated MAS can be seamlessly applied to process user queries and deliver high-quality responses. Extensive experiments on 9 benchmarks and 5 LLMs show that the proposed MAS-GPT consistently outperforms 10+ baseline MAS methods on diverse settings, indicating MAS-GPT's high effectiveness, efficiency and strong generalization ability. Code will be available at https://github.com/rui-ye/MAS-GPT.
Self-Evolving Multi-Agent Collaboration Networks for Software Development
Oct 22, 2024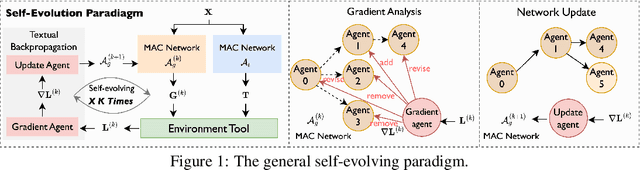


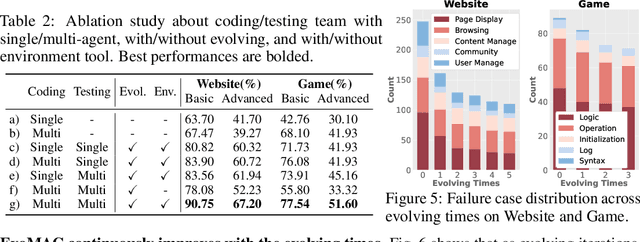
LLM-driven multi-agent collaboration (MAC) systems have demonstrated impressive capabilities in automatic software development at the function level. However, their heavy reliance on human design limits their adaptability to the diverse demands of real-world software development. To address this limitation, we introduce EvoMAC, a novel self-evolving paradigm for MAC networks. Inspired by traditional neural network training, EvoMAC obtains text-based environmental feedback by verifying the MAC network's output against a target proxy and leverages a novel textual backpropagation to update the network. To extend coding capabilities beyond function-level tasks to more challenging software-level development, we further propose rSDE-Bench, a requirement-oriented software development benchmark, which features complex and diverse software requirements along with automatic evaluation of requirement correctness. Our experiments show that: i) The automatic requirement-aware evaluation in rSDE-Bench closely aligns with human evaluations, validating its reliability as a software-level coding benchmark. ii) EvoMAC outperforms previous SOTA methods on both the software-level rSDE-Bench and the function-level HumanEval benchmarks, reflecting its superior coding capabilities. The benchmark can be downloaded at https://yuzhu-cai.github.io/rSDE-Bench/.