 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStone Soup: ADS-B-based Multi-Target Tracking with Stochastic Integration Filter
Jun 09, 2025This paper focuses on the multi-target tracking using the Stone Soup framework. In particular, we aim at evaluation of two multi-target tracking scenarios based on the simulated class-B dataset and ADS-B class-A dataset provided by OpenSky Network. The scenarios are evaluated w.r.t. selection of a local state estimator using a range of the Stone Soup metrics. Source code with scenario definitions and Stone Soup set-up are provided along with the paper.
Unobservable Systems: No Problem for Noise Identification
May 29, 2025

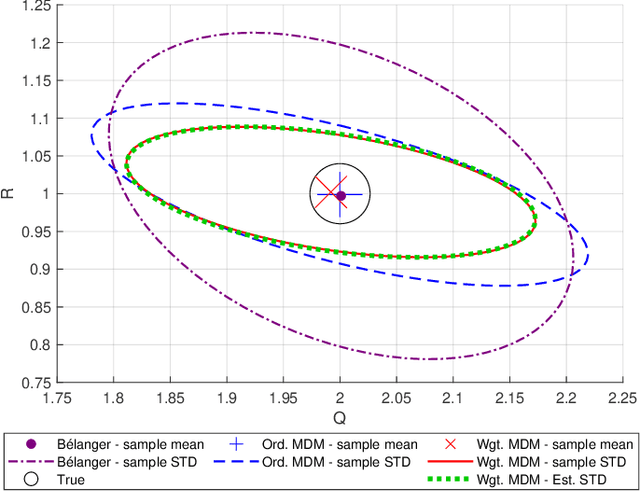
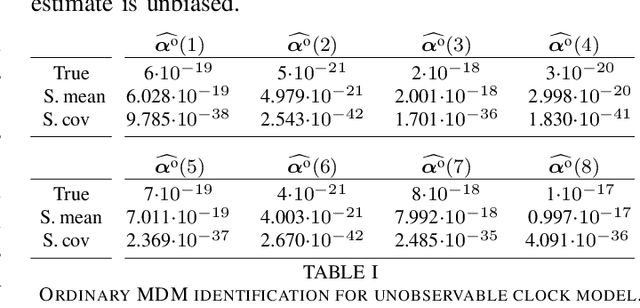
This paper deals with the noise identification of a linear time-varying stochastic dynamic system described by the state-space model. In particular, the stress is laid on the design of the correlation measurement difference method for estimation of the state and measurement noise covariance matrices for both observable and \textit{unobservable} systems with possibly unknown input sequence. The method provides unbiased and consistent estimates and is implemented in a publicly available MATLAB toolbox and numerically evaluated.
Stochastic Integration Based Estimator: Robust Design and Stone Soup Implementation
Dec 10, 2024This paper deals with state estimation of nonlinear stochastic dynamic models. In particular, the stochastic integration rule, which provides asymptotically unbiased estimates of the moments of nonlinearly transformed Gaussian random variables, is reviewed together with the recently introduced stochastic integration filter (SIF). Using SIF, the respective multi-step prediction and smoothing algorithms are developed in full and efficient square-root form. The stochastic-integration-rule-based algorithms are implemented in Python (within the Stone Soup framework) and in MATLAB and are numerically evaluated and compared with the well-known unscented and extended Kalman filters using the Stone Soup defined tracking scenario.
Efficient Spectral Differentiation in Grid-Based Continuous State Estimation
Dec 10, 2024This paper deals with the state estimation of stochastic models with continuous dynamics. The aim is to incorporate spectral differentiation methods into the solution to the Fokker-Planck equation in grid-based state estimation routine, while taking into account the specifics of the field, such as probability density function (PDF) features, moving grid, zero boundary conditions, etc. The spectral methods, in general, achieve very fast convergence rate of O(c^N )(O < c < 1) for analytical functions such as the probability density function, where N is the number of grid points. This is significantly better than the standard finite difference method (or midpoint rule used in discrete estimation) typically used in grid-based filter design with convergence rate O( 1 / N^2 ). As consequence, the proposed spectral method based filter provides better state estimation accuracy with lower number of grid points, and thus, with lower computational complexity.
Data-Augmented Numerical Integration in State Prediction: Rule Selection
Dec 09, 2024



This paper deals with the state prediction of nonlinear stochastic dynamic systems. The emphasis is laid on a solution to the integral Chapman-Kolmogorov equation by a deterministic-integration-rule-based point-mass method. A novel concept of reliable data-augmented, i.e., mathematics- and data-informed, integration rule is developed to enhance the point-mass state predictor, where the trained neural network (representing data contribution) is used for the selection of the best integration rule from a set of available rules (representing mathematics contribution). The proposed approach combining the best properties of the standard mathematics-informed and novel data-informed rules is thoroughly discussed.
State Noise Density Identification of LTV System by Kernel Deconvolution
Dec 02, 2024



This paper focuses on identification of the state noise density of a linear time-varying system described by the state-space model with the known measurement noise density. For this purpose, a novel method extending the capabilities of the measurement difference method (MDM) is proposed. The proposed method is based on the enhanced MDM residue calculation being a sum of the state and measurement noise, and on the construction of the residue sample kernel density. The state noise density is then estimated by the density deconvolution algorithm utilising the Fourier transform. The developed method is supplemented with automatic selection of the deconvolution user-defined parameters based on the proposed method of the noise moment equality. The state noise density estimation performance is evaluated in numerical examples and supplemented with the MALAB example implementation.
AI-Aided Kalman Filters
Oct 16, 2024



The Kalman filter (KF) and its variants are among the most celebrated algorithms in signal processing. These methods are used for state estimation of dynamic systems by relying on mathematical representations in the form of simple state-space (SS) models, which may be crude and inaccurate descriptions of the underlying dynamics. Emerging data-centric artificial intelligence (AI) techniques tackle these tasks using deep neural networks (DNNs), which are model-agnostic. Recent developments illustrate the possibility of fusing DNNs with classic Kalman-type filtering, obtaining systems that learn to track in partially known dynamics. This article provides a tutorial-style overview of design approaches for incorporating AI in aiding KF-type algorithms. We review both generic and dedicated DNN architectures suitable for state estimation, and provide a systematic presentation of techniques for fusing AI tools with KFs and for leveraging partial SS modeling and data, categorizing design approaches into task-oriented and SS model-oriented. The usefulness of each approach in preserving the individual strengths of model-based KFs and data-driven DNNs is investigated in a qualitative and quantitative study, whose code is publicly available, illustrating the gains of hybrid model-based/data-driven designs. We also discuss existing challenges and future research directions that arise from fusing AI and Kalman-type algorithms.
Advanced Receiver Autonomous Integrity Monitoring: Impact of Time-Correlated Pseudorange Measurement Noise
Feb 16, 2024The paper deals with the allocation of the probability of false alert within the advanced receiver integrity monitoring method. Namely, the stress is laid on the correct computation of the probability of false alert per sample under assumption of time-correlated pseudorange noise. Detailed analysis of the dependence of the probability of false alert per sample on the measurement noise time constant is given and a numerical algorithm for the correct computation of the probability is proposed. The algorithm is illustrated using a numerical example.
Uncertainty Quantification in Deep Learning Based Kalman Filters
Sep 06, 2023Various algorithms combine deep neural networks (DNNs) and Kalman filters (KFs) to learn from data to track in complex dynamics. Unlike classic KFs, DNN-based systems do not naturally provide the error covariance alongside their estimate, which is of great importance in some applications, e.g., navigation. To bridge this gap, in this work we study error covariance extraction in DNN-aided KFs. We examine three main approaches that are distinguished by the ability to associate internal features with meaningful KF quantities such as the Kalman gain (KG) and prior covariance. We identify the differences between these approaches in their requirements and their effect on the training of the system. Our numerical study demonstrates that the above approaches allow DNN-aided KFs to extract error covariance, with most accurate error prediction provided by model-based/data-driven designs.
Online Learning and Control for Data-Augmented Quadrotor Model
Apr 02, 2023



The ability to adapt to changing conditions is a key feature of a successful autonomous system. In this work, we use the Recursive Gaussian Processes (RGP) for identification of the quadrotor air drag model online, without the need of training data. The identified drag model then augments a physics-based model of the quadrotor dynamics, which allows more accurate quadrotor state prediction with increased ability to adapt to changing conditions. This data-augmented physics-based model is utilized for precise quadrotor trajectory tracking using the suitably modified Model Predictive Control (MPC) algorithm. The proposed modelling and control approach is evaluated using the Gazebo simulator and it is shown that the proposed approach tracks a desired trajectory with a higher accuracy compared to the MPC with the non-augmented (purely physics-based) model.