 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Learning and Control for Data-Augmented Quadrotor Model
Apr 02, 2023



The ability to adapt to changing conditions is a key feature of a successful autonomous system. In this work, we use the Recursive Gaussian Processes (RGP) for identification of the quadrotor air drag model online, without the need of training data. The identified drag model then augments a physics-based model of the quadrotor dynamics, which allows more accurate quadrotor state prediction with increased ability to adapt to changing conditions. This data-augmented physics-based model is utilized for precise quadrotor trajectory tracking using the suitably modified Model Predictive Control (MPC) algorithm. The proposed modelling and control approach is evaluated using the Gazebo simulator and it is shown that the proposed approach tracks a desired trajectory with a higher accuracy compared to the MPC with the non-augmented (purely physics-based) model.
Rolling Shutter Camera Synchronization with Sub-millisecond Accuracy
Feb 28, 2019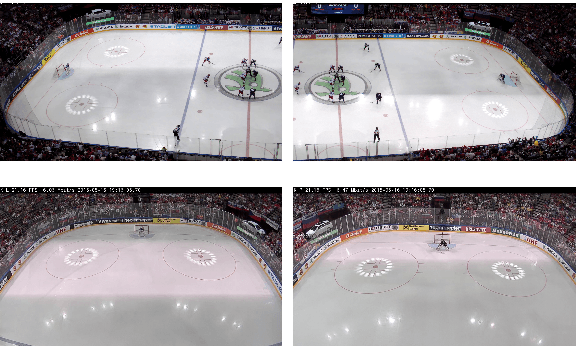

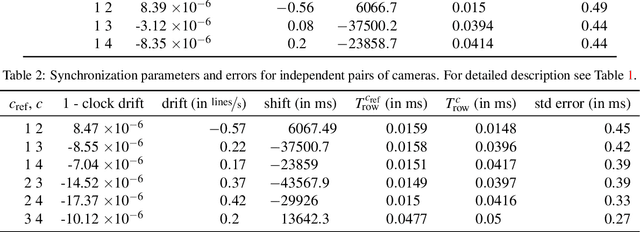
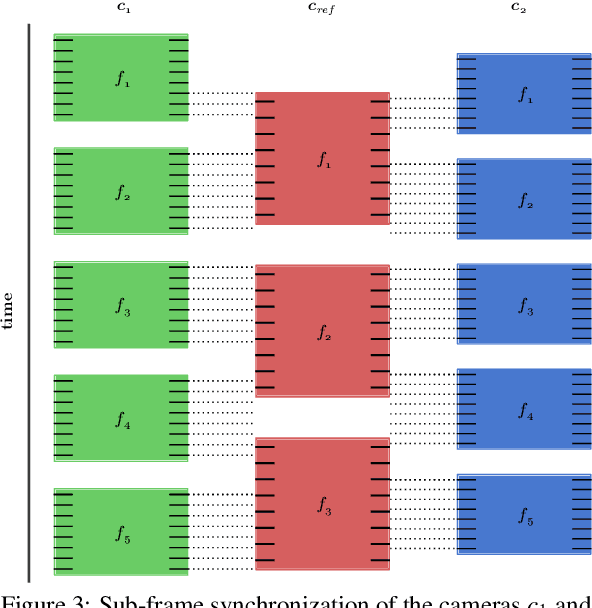
A simple method for synchronization of video streams with a precision better than one millisecond is proposed. The method is applicable to any number of rolling shutter cameras and when a few photographic flashes or other abrupt lighting changes are present in the video. The approach exploits the rolling shutter sensor property that every sensor row starts its exposure with a small delay after the onset of the previous row. The cameras may have different frame rates and resolutions, and need not have overlapping fields of view. The method was validated on five minutes of four streams from an ice hockey match. The found transformation maps events visible in all cameras to a reference time with a standard deviation of the temporal error in the range of 0.3 to 0.5 milliseconds. The quality of the synchronization is demonstrated on temporally and spatially overlapping images of a fast moving puck observed in two cameras.
* 8 pages, 10 figures, published at VISAPP 2017
On the Two-View Geometry of Unsynchronized Cameras
Apr 22, 2017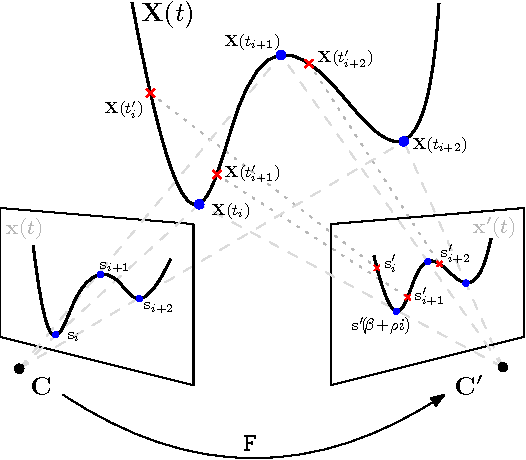
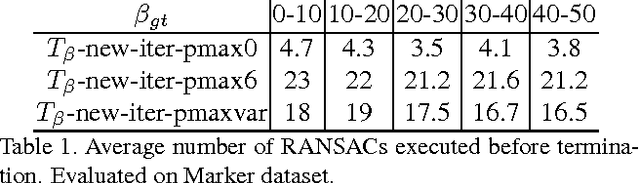
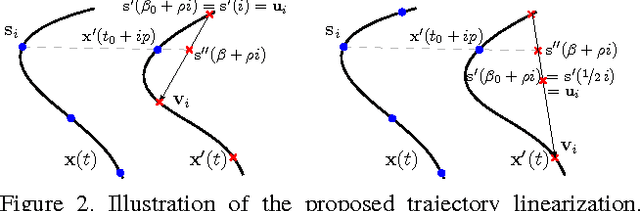
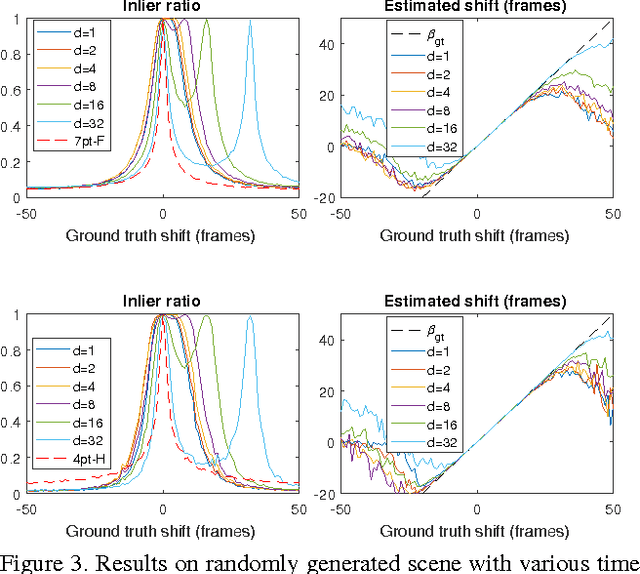
We present new methods for simultaneously estimating camera geometry and time shift from video sequences from multiple unsynchronized cameras. Algorithms for simultaneous computation of a fundamental matrix or a homography with unknown time shift between images are developed. Our methods use minimal correspondence sets (eight for fundamental matrix and four and a half for homography) and therefore are suitable for robust estimation using RANSAC. Furthermore, we present an iterative algorithm that extends the applicability on sequences which are significantly unsynchronized, finding the correct time shift up to several seconds. We evaluated the methods on synthetic and wide range of real world datasets and the results show a broad applicability to the problem of camera synchronization.