 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI-Aided Kalman Filters
Oct 16, 2024



The Kalman filter (KF) and its variants are among the most celebrated algorithms in signal processing. These methods are used for state estimation of dynamic systems by relying on mathematical representations in the form of simple state-space (SS) models, which may be crude and inaccurate descriptions of the underlying dynamics. Emerging data-centric artificial intelligence (AI) techniques tackle these tasks using deep neural networks (DNNs), which are model-agnostic. Recent developments illustrate the possibility of fusing DNNs with classic Kalman-type filtering, obtaining systems that learn to track in partially known dynamics. This article provides a tutorial-style overview of design approaches for incorporating AI in aiding KF-type algorithms. We review both generic and dedicated DNN architectures suitable for state estimation, and provide a systematic presentation of techniques for fusing AI tools with KFs and for leveraging partial SS modeling and data, categorizing design approaches into task-oriented and SS model-oriented. The usefulness of each approach in preserving the individual strengths of model-based KFs and data-driven DNNs is investigated in a qualitative and quantitative study, whose code is publicly available, illustrating the gains of hybrid model-based/data-driven designs. We also discuss existing challenges and future research directions that arise from fusing AI and Kalman-type algorithms.
Outlier-Insensitive Kalman Filtering: Theory and Applications
Sep 18, 2023State estimation of dynamical systems from noisy observations is a fundamental task in many applications. It is commonly addressed using the linear Kalman filter (KF), whose performance can significantly degrade in the presence of outliers in the observations, due to the sensitivity of its convex quadratic objective function. To mitigate such behavior, outlier detection algorithms can be applied. In this work, we propose a parameter-free algorithm which mitigates the harmful effect of outliers while requiring only a short iterative process of the standard update step of the KF. To that end, we model each potential outlier as a normal process with unknown variance and apply online estimation through either expectation maximization or alternating maximization algorithms. Simulations and field experiment evaluations demonstrate competitive performance of our method, showcasing its robustness to outliers in filtering scenarios compared to alternative algorithms.
Adaptive KalmanNet: Data-Driven Kalman Filter with Fast Adaptation
Sep 14, 2023Combining the classical Kalman filter (KF) with a deep neural network (DNN) enables tracking in partially known state space (SS) models. A major limitation of current DNN-aided designs stems from the need to train them to filter data originating from a specific distribution and underlying SS model. Consequently, changes in the model parameters may require lengthy retraining. While the KF adapts through parameter tuning, the black-box nature of DNNs makes identifying tunable components difficult. Hence, we propose Adaptive KalmanNet (AKNet), a DNN-aided KF that can adapt to changes in the SS model without retraining. Inspired by recent advances in large language model fine-tuning paradigms, AKNet uses a compact hypernetwork to generate context-dependent modulation weights. Numerical evaluation shows that AKNet provides consistent state estimation performance across a continuous range of noise distributions, even when trained using data from limited noise settings.
NUV-DoA: NUV Prior-based Bayesian Sparse Reconstruction with Spatial Filtering for Super-Resolution DoA Estimation
Sep 13, 2023Achieving high-resolution Direction of Arrival (DoA) recovery typically requires high Signal to Noise Ratio (SNR) and a sufficiently large number of snapshots. This paper presents NUV-DoA algorithm, that augments Bayesian sparse reconstruction with spatial filtering for super-resolution DoA estimation. By modeling each direction on the azimuth's grid with the sparsity-promoting normal with unknown variance (NUV) prior, the non-convex optimization problem is reduced to iteratively reweighted least-squares under Gaussian distribution, where the mean of the snapshots is a sufficient statistic. This approach not only simplifies our solution but also accurately detects the DoAs. We utilize a hierarchical approach for interference cancellation in multi-source scenarios. Empirical evaluations show the superiority of NUV-DoA, especially in low SNRs, compared to alternative DoA estimators.
Uncertainty Quantification in Deep Learning Based Kalman Filters
Sep 06, 2023Various algorithms combine deep neural networks (DNNs) and Kalman filters (KFs) to learn from data to track in complex dynamics. Unlike classic KFs, DNN-based systems do not naturally provide the error covariance alongside their estimate, which is of great importance in some applications, e.g., navigation. To bridge this gap, in this work we study error covariance extraction in DNN-aided KFs. We examine three main approaches that are distinguished by the ability to associate internal features with meaningful KF quantities such as the Kalman gain (KG) and prior covariance. We identify the differences between these approaches in their requirements and their effect on the training of the system. Our numerical study demonstrates that the above approaches allow DNN-aided KFs to extract error covariance, with most accurate error prediction provided by model-based/data-driven designs.
SubspaceNet: Deep Learning-Aided Subspace Methods for DoA Estimation
Jun 04, 2023Direction of arrival (DoA) estimation is a fundamental task in array processing. A popular family of DoA estimation algorithms are subspace methods, which operate by dividing the measurements into distinct signal and noise subspaces. Subspace methods, such as Multiple Signal Classification (MUSIC) and Root-MUSIC, rely on several restrictive assumptions, including narrowband non-coherent sources and fully calibrated arrays, and their performance is considerably degraded when these do not hold. In this work we propose SubspaceNet; a data-driven DoA estimator which learns how to divide the observations into distinguishable subspaces. This is achieved by utilizing a dedicated deep neural network to learn the empirical autocorrelation of the input, by training it as part of the Root-MUSIC method, leveraging the inherent differentiability of this specific DoA estimator, while removing the need to provide a ground-truth decomposable autocorrelation matrix. Once trained, the resulting SubspaceNet serves as a universal surrogate covariance estimator that can be applied in combination with any subspace-based DoA estimation method, allowing its successful application in challenging setups. SubspaceNet is shown to enable various DoA estimation algorithms to cope with coherent sources, wideband signals, low SNR, array mismatches, and limited snapshots, while preserving the interpretability and the suitability of classic subspace methods.
Latent-KalmanNet: Learned Kalman Filtering for Tracking from High-Dimensional Signals
Apr 20, 2023The Kalman filter (KF) is a widely-used algorithm for tracking dynamic systems that are captured by state space (SS) models. The need to fully describe a SS model limits its applicability under complex settings, e.g., when tracking based on visual data, and the processing of high-dimensional signals often induces notable latency. These challenges can be treated by mapping the measurements into latent features obeying some postulated closed-form SS model, and applying the KF in the latent space. However, the validity of this approximated SS model may constitute a limiting factor. In this work, we study tracking from high-dimensional measurements under complex settings using a hybrid model-based/data-driven approach. By gradually tackling the challenges in handling the observations model and the task, we develop Latent-KalmanNet, which implements tracking from high-dimensional measurements by leveraging data to jointly learn the KF along with the latent space mapping. Latent-KalmanNet combines a learned encoder with data-driven tracking in the latent space using the recently proposed-KalmanNet, while identifying the ability of each of these trainable modules to assist its counterpart via providing a suitable prior (by KalmanNet) and by learning a latent representation that facilitates data-aided tracking (by the encoder). Our empirical results demonstrate that the proposed Latent-KalmanNet achieves improved accuracy and run-time performance over both model-based and data-driven techniques by learning a surrogate latent representation that most facilitates tracking, while operating with limited complexity and latency.
LQGNet: Hybrid Model-Based and Data-Driven Linear Quadratic Stochastic Control
Oct 25, 2022Stochastic control deals with finding an optimal control signal for a dynamical system in a setting with uncertainty, playing a key role in numerous applications. The linear quadratic Gaussian (LQG) is a widely-used setting, where the system dynamics is represented as a linear Gaussian statespace (SS) model, and the objective function is quadratic. For this setting, the optimal controller is obtained in closed form by the separation principle. However, in practice, the underlying system dynamics often cannot be faithfully captured by a fully known linear Gaussian SS model, limiting its performance. Here, we present LQGNet, a stochastic controller that leverages data to operate under partially known dynamics. LQGNet augments the state tracking module of separation-based control with a dedicated trainable algorithm. The resulting system preserves the operation of classic LQG control while learning to cope with partially known SS models without having to fully identify the dynamics. We empirically show that LQGNet outperforms classic stochastic control by overcoming mismatched SS models.
Hierarchical Filtering with Online Learned Priors for ECG Denoising
Oct 23, 2022Electrocardiographic signals (ECG) are used in many healthcare applications, including at-home monitoring of vital signs. These applications often rely on wearable technology and provide low quality ECG signals. Although many methods have been proposed for denoising the ECG to boost its quality and enable clinical interpretation, these methods typically fall short for ECG data obtained with wearable technology, because of either their limited tolerance to noise or their limited flexibility to capture ECG dynamics. This paper presents HKF, a hierarchical Kalman filtering method, that leverages a patient-specific learned structured prior of the ECG signal, and integrates it into a state space model to yield filters that capture both intra- and inter-heartbeat dynamics. HKF is demonstrated to outperform previously proposed methods such as the model-based Kalman filter and data-driven autoencoders, in ECG denoising task in terms of mean-squared error, making it a suitable candidate for application in extramural healthcare settings.
Outlier-Insensitive Kalman Filtering Using NUV Priors
Oct 12, 2022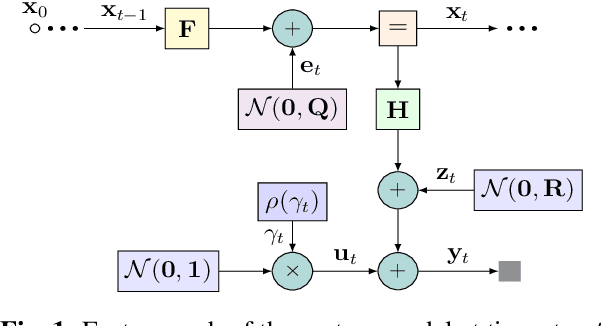
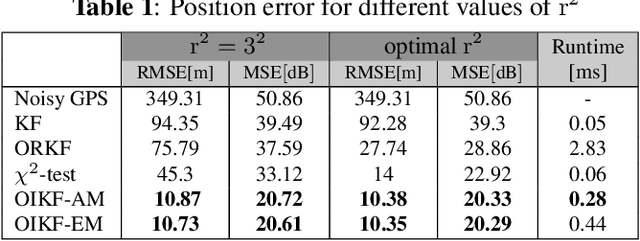
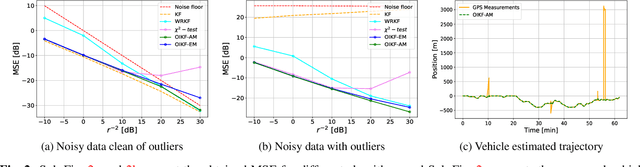
The Kalman filter (KF) is a widely-used algorithm for tracking the latent state of a dynamical system from noisy observations. For systems that are well-described by linear Gaussian state space models, the KF minimizes the mean-squared error (MSE). However, in practice, observations are corrupted by outliers, severely impairing the KFs performance. In this work, an outlier-insensitive KF is proposed, where robustness is achieved by modeling each potential outlier as a normally distributed random variable with unknown variance (NUV). The NUVs variances are estimated online, using both expectation-maximization (EM) and alternating maximization (AM). The former was previously proposed for the task of smoothing with outliers and was adapted here to filtering, while both EM and AM obtained the same performance and outperformed the other algorithms, the AM approach is less complex and thus requires 40 percentage less run-time. Our empirical study demonstrates that the MSE of our proposed outlier-insensitive KF outperforms previously proposed algorithms, and that for data clean of outliers, it reverts to the classic KF, i.e., MSE optimality is preserved