 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOutlier-Insensitive Kalman Filtering: Theory and Applications
Sep 18, 2023State estimation of dynamical systems from noisy observations is a fundamental task in many applications. It is commonly addressed using the linear Kalman filter (KF), whose performance can significantly degrade in the presence of outliers in the observations, due to the sensitivity of its convex quadratic objective function. To mitigate such behavior, outlier detection algorithms can be applied. In this work, we propose a parameter-free algorithm which mitigates the harmful effect of outliers while requiring only a short iterative process of the standard update step of the KF. To that end, we model each potential outlier as a normal process with unknown variance and apply online estimation through either expectation maximization or alternating maximization algorithms. Simulations and field experiment evaluations demonstrate competitive performance of our method, showcasing its robustness to outliers in filtering scenarios compared to alternative algorithms.
Outlier-Insensitive Kalman Filtering Using NUV Priors
Oct 12, 2022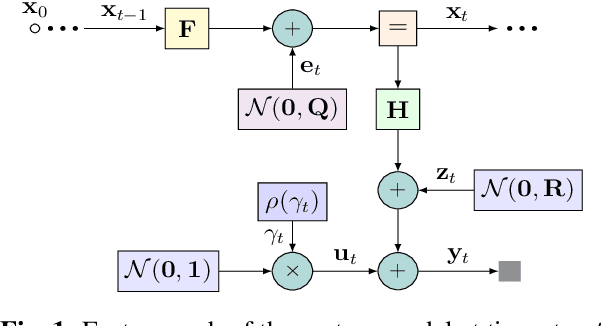
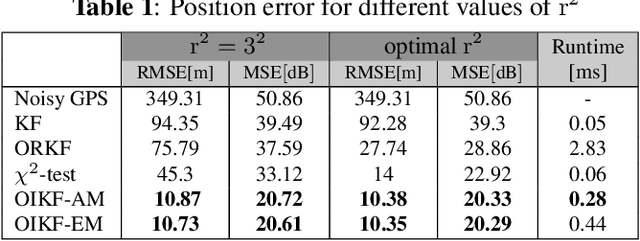
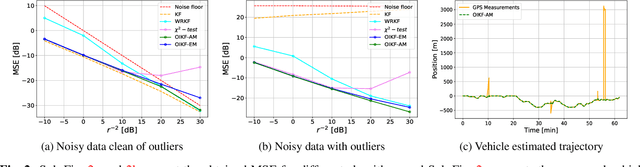
The Kalman filter (KF) is a widely-used algorithm for tracking the latent state of a dynamical system from noisy observations. For systems that are well-described by linear Gaussian state space models, the KF minimizes the mean-squared error (MSE). However, in practice, observations are corrupted by outliers, severely impairing the KFs performance. In this work, an outlier-insensitive KF is proposed, where robustness is achieved by modeling each potential outlier as a normally distributed random variable with unknown variance (NUV). The NUVs variances are estimated online, using both expectation-maximization (EM) and alternating maximization (AM). The former was previously proposed for the task of smoothing with outliers and was adapted here to filtering, while both EM and AM obtained the same performance and outperformed the other algorithms, the AM approach is less complex and thus requires 40 percentage less run-time. Our empirical study demonstrates that the MSE of our proposed outlier-insensitive KF outperforms previously proposed algorithms, and that for data clean of outliers, it reverts to the classic KF, i.e., MSE optimality is preserved