 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Differential GNSS Positioning: Estimators and Bounds
Jan 09, 2026In Differential GNSS (DGNSS) positioning, differencing measurements between a user and a reference station suppresses common-mode errors but also introduces reference-station noise, which fundamentally limits accuracy. This limitation is minor for high-grade stations but becomes significant when using reference infrastructure of mixed quality. This paper investigates how large-scale user cooperation can mitigate the impact of reference-station noise in conventional (non-cooperative) DGNSS systems. We develop a unified estimation framework for cooperative DGNSS (C-DGNSS) and cooperative real-time kinematic (C-RTK) positioning, and derive parameterized expressions for their Fisher information matrices as functions of network size, satellite geometry, and reference-station noise. This formulation enables theoretical analysis of estimation performance, identifying regimes where cooperation asymptotically restores the accuracy of DGNSS with an ideal (noise-free) reference. Simulations validate these theoretical findings.
K-Track: Kalman-Enhanced Tracking for Accelerating Deep Point Trackers on Edge Devices
Dec 11, 2025Point tracking in video sequences is a foundational capability for real-world computer vision applications, including robotics, autonomous systems, augmented reality, and video analysis. While recent deep learning-based trackers achieve state-of-the-art accuracy on challenging benchmarks, their reliance on per-frame GPU inference poses a major barrier to deployment on resource-constrained edge devices, where compute, power, and connectivity are limited. We introduce K-Track (Kalman-enhanced Tracking), a general-purpose, tracker-agnostic acceleration framework designed to bridge this deployment gap. K-Track reduces inference cost by combining sparse deep learning keyframe updates with lightweight Kalman filtering for intermediate frame prediction, using principled Bayesian uncertainty propagation to maintain temporal coherence. This hybrid strategy enables 5-10X speedup while retaining over 85% of the original trackers' accuracy. We evaluate K-Track across multiple state-of-the-art point trackers and demonstrate real-time performance on edge platforms such as the NVIDIA Jetson Nano and RTX Titan. By preserving accuracy while dramatically lowering computational requirements, K-Track provides a practical path toward deploying high-quality point tracking in real-world, resource-limited settings, closing the gap between modern tracking algorithms and deployable vision systems.
Trends and Challenges in Next-Generation GNSS Interference Management
Oct 31, 2025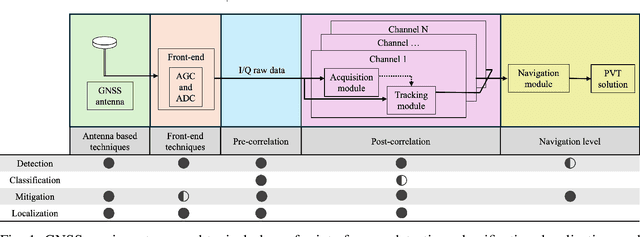
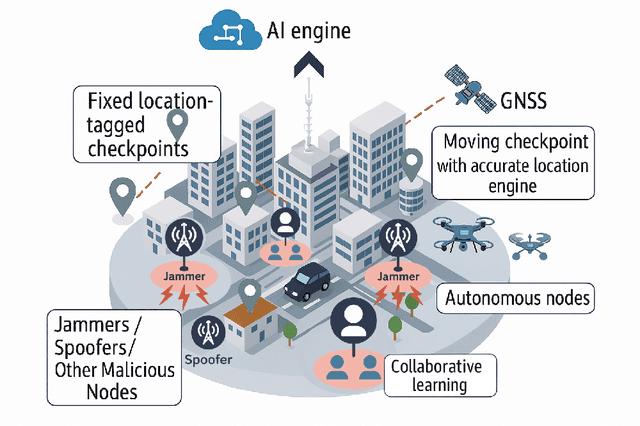
The global navigation satellite system (GNSS) continues to evolve in order to meet the demands of emerging applications such as autonomous driving and smart environmental monitoring. However, these advancements are accompanied by a rise in interference threats, which can significantly compromise the reliability and safety of GNSS. Such interference problems are typically addressed through signal-processing techniques that rely on physics-based mathematical models. Unfortunately, solutions of this nature can often fail to fully capture the complex forms of interference. To address this, artificial intelligence (AI)-inspired solutions are expected to play a key role in future interference management solutions, thanks to their ability to exploit data in addition to physics-based models. This magazine paper discusses the main challenges and tasks required to secure GNSS and present a research vision on how AI can be leveraged towards achieving more robust GNSS-based positioning.
Bayesian Jammer Localization with a Hybrid CNN and Path-Loss Mixture of Experts
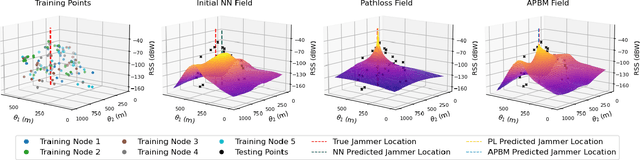
Oct 23, 2025Global Navigation Satellite System (GNSS) signals are vulnerable to jamming, particularly in urban areas where multipath and shadowing distort received power. Previous data-driven approaches achieved reasonable localization but poorly reconstructed the received signal strength (RSS) field due to limited spatial context. We propose a hybrid Bayesian mixture-of-experts framework that fuses a physical path-loss (PL) model and a convolutional neural network (CNN) through log-linear pooling. The PL expert ensures physical consistency, while the CNN leverages building-height maps to capture urban propagation effects. Bayesian inference with Laplace approximation provides posterior uncertainty over both the jammer position and RSS field. Experiments on urban ray-tracing data show that localization accuracy improves and uncertainty decreases with more training points, while uncertainty concentrates near the jammer and along urban canyons where propagation is most sensitive.
DPMM-CFL: Clustered Federated Learning via Dirichlet Process Mixture Model Nonparametric Clustering
Oct 08, 2025Clustered Federated Learning (CFL) improves performance under non-IID client heterogeneity by clustering clients and training one model per cluster, thereby balancing between a global model and fully personalized models. However, most CFL methods require the number of clusters K to be fixed a priori, which is impractical when the latent structure is unknown. We propose DPMM-CFL, a CFL algorithm that places a Dirichlet Process (DP) prior over the distribution of cluster parameters. This enables nonparametric Bayesian inference to jointly infer both the number of clusters and client assignments, while optimizing per-cluster federated objectives. This results in a method where, at each round, federated updates and cluster inferences are coupled, as presented in this paper. The algorithm is validated on benchmark datasets under Dirichlet and class-split non-IID partitions.
Robust Recursive Fusion of Multiresolution Multispectral Images with Location-Aware Neural Networks
Jun 16, 2025Multiresolution image fusion is a key problem for real-time satellite imaging and plays a central role in detecting and monitoring natural phenomena such as floods. It aims to solve the trade-off between temporal and spatial resolution in remote sensing instruments. Although several algorithms have been proposed for this problem, the presence of outliers such as clouds downgrades their performance. Moreover, strategies that integrate robustness, recursive operation and learned models are missing. In this paper, a robust recursive image fusion framework leveraging location-aware neural networks (NN) to model the image dynamics is proposed. Outliers are modeled by representing the probability of contamination of a given pixel and band. A NN model trained on a small dataset provides accurate predictions of the stochastic image time evolution, which improves both the accuracy and robustness of the method. A recursive solution is proposed to estimate the high-resolution images using a Bayesian variational inference framework. Experiments fusing images from the Landsat 8 and MODIS instruments show that the proposed approach is significantly more robust against cloud cover, without losing performance when no clouds are present.
Recursive Deep Inverse Reinforcement Learning
Apr 21, 2025Inferring an adversary's goals from exhibited behavior is crucial for counterplanning and non-cooperative multi-agent systems in domains like cybersecurity, military, and strategy games. Deep Inverse Reinforcement Learning (IRL) methods based on maximum entropy principles show promise in recovering adversaries' goals but are typically offline, require large batch sizes with gradient descent, and rely on first-order updates, limiting their applicability in real-time scenarios. We propose an online Recursive Deep Inverse Reinforcement Learning (RDIRL) approach to recover the cost function governing the adversary actions and goals. Specifically, we minimize an upper bound on the standard Guided Cost Learning (GCL) objective using sequential second-order Newton updates, akin to the Extended Kalman Filter (EKF), leading to a fast (in terms of convergence) learning algorithm. We demonstrate that RDIRL is able to recover cost and reward functions of expert agents in standard and adversarial benchmark tasks. Experiments on benchmark tasks show that our proposed approach outperforms several leading IRL algorithms.
A Bayesian Framework for Clustered Federated Learning
Oct 22, 2024One of the main challenges of federated learning (FL) is handling non-independent and identically distributed (non-IID) client data, which may occur in practice due to unbalanced datasets and use of different data sources across clients. Knowledge sharing and model personalization are key strategies for addressing this issue. Clustered federated learning is a class of FL methods that groups clients that observe similarly distributed data into clusters, such that every client is typically associated with one data distribution and participates in training a model for that distribution along their cluster peers. In this paper, we present a unified Bayesian framework for clustered FL which associates clients to clusters. Then we propose several practical algorithms to handle the, otherwise growing, data associations in a way that trades off performance and computational complexity. This work provides insights on client-cluster associations and enables client knowledge sharing in new ways. The proposed framework circumvents the need for unique client-cluster associations, which is seen to increase the performance of the resulting models in a variety of experiments.
Bayesian data fusion for distributed learning
Oct 20, 2024One of the main challenges of federated learning (FL) is handling non-independent and identically distributed (non-IID) client data, which may occur in practice due to unbalanced datasets and use of different data sources across clients. Knowledge sharing and model personalization are key strategies for addressing this issue. Clustered federated learning is a class of FL methods that groups clients that observe similarly distributed data into clusters, such that every client is typically associated with one data distribution and participates in training a model for that distribution along their cluster peers. In this paper, we present a unified Bayesian framework for clustered FL which associates clients to clusters. Then we propose several practical algorithms to handle the, otherwise growing, data associations in a way that trades off performance and computational complexity. This work provides insights on client-cluster associations and enables client knowledge sharing in new ways. The proposed framework circumvents the need for unique client-cluster associations, which is seen to increase the performance of the resulting models in a variety of experiments.
AI-Aided Kalman Filters
Oct 16, 2024



The Kalman filter (KF) and its variants are among the most celebrated algorithms in signal processing. These methods are used for state estimation of dynamic systems by relying on mathematical representations in the form of simple state-space (SS) models, which may be crude and inaccurate descriptions of the underlying dynamics. Emerging data-centric artificial intelligence (AI) techniques tackle these tasks using deep neural networks (DNNs), which are model-agnostic. Recent developments illustrate the possibility of fusing DNNs with classic Kalman-type filtering, obtaining systems that learn to track in partially known dynamics. This article provides a tutorial-style overview of design approaches for incorporating AI in aiding KF-type algorithms. We review both generic and dedicated DNN architectures suitable for state estimation, and provide a systematic presentation of techniques for fusing AI tools with KFs and for leveraging partial SS modeling and data, categorizing design approaches into task-oriented and SS model-oriented. The usefulness of each approach in preserving the individual strengths of model-based KFs and data-driven DNNs is investigated in a qualitative and quantitative study, whose code is publicly available, illustrating the gains of hybrid model-based/data-driven designs. We also discuss existing challenges and future research directions that arise from fusing AI and Kalman-type algorithms.