 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Differential GNSS Positioning: Estimators and Bounds
Jan 09, 2026In Differential GNSS (DGNSS) positioning, differencing measurements between a user and a reference station suppresses common-mode errors but also introduces reference-station noise, which fundamentally limits accuracy. This limitation is minor for high-grade stations but becomes significant when using reference infrastructure of mixed quality. This paper investigates how large-scale user cooperation can mitigate the impact of reference-station noise in conventional (non-cooperative) DGNSS systems. We develop a unified estimation framework for cooperative DGNSS (C-DGNSS) and cooperative real-time kinematic (C-RTK) positioning, and derive parameterized expressions for their Fisher information matrices as functions of network size, satellite geometry, and reference-station noise. This formulation enables theoretical analysis of estimation performance, identifying regimes where cooperation asymptotically restores the accuracy of DGNSS with an ideal (noise-free) reference. Simulations validate these theoretical findings.
Bayesian and Neural Inference on LSTM-based Object Recognition from Tactile and Kinesthetic Information
Jun 10, 2023



Recent advances in the field of intelligent robotic manipulation pursue providing robotic hands with touch sensitivity. Haptic perception encompasses the sensing modalities encountered in the sense of touch (e.g., tactile and kinesthetic sensations). This letter focuses on multimodal object recognition and proposes analytical and data-driven methodologies to fuse tactile- and kinesthetic-based classification results. The procedure is as follows: a three-finger actuated gripper with an integrated high-resolution tactile sensor performs squeeze-and-release Exploratory Procedures (EPs). The tactile images and kinesthetic information acquired using angular sensors on the finger joints constitute the time-series datasets of interest. Each temporal dataset is fed to a Long Short-term Memory (LSTM) Neural Network, which is trained to classify in-hand objects. The LSTMs provide an estimation of the posterior probability of each object given the corresponding measurements, which after fusion allows to estimate the object through Bayesian and Neural inference approaches. An experiment with 36-classes is carried out to evaluate and compare the performance of the fused, tactile, and kinesthetic perception systems.The results show that the Bayesian-based classifiers improves capabilities for object recognition and outperforms the Neural-based approach.
Leveraging Evidential Deep Learning Uncertainties with Graph-based Clustering to Detect Anomalies
Jul 04, 2021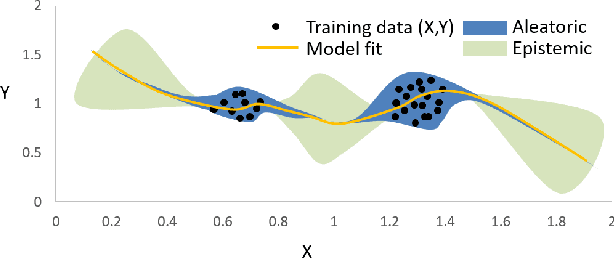
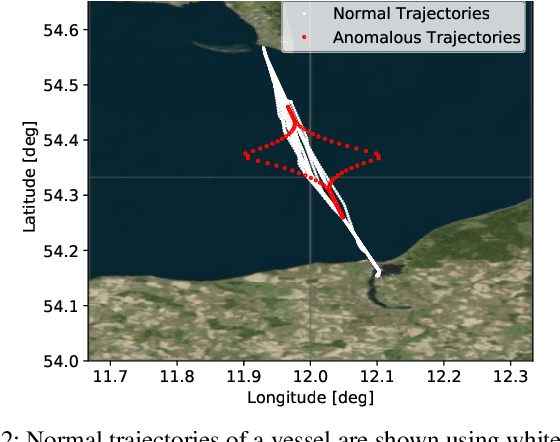
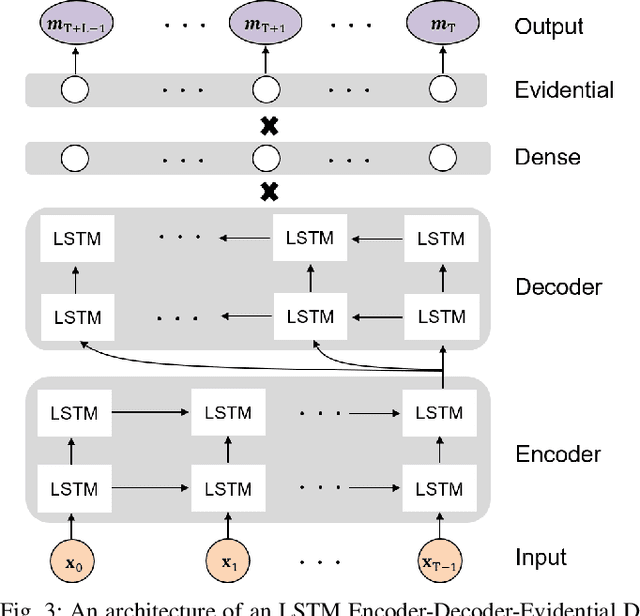
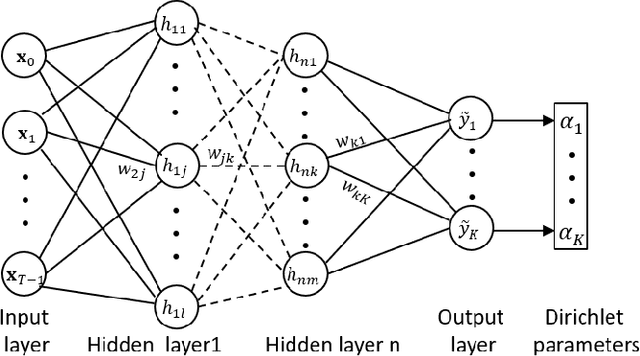
Understanding and representing traffic patterns are key to detecting anomalies in the maritime domain. To this end, we propose a novel graph-based traffic representation and association scheme to cluster trajectories of vessels using automatic identification system (AIS) data. We utilize the (un)clustered data to train a recurrent neural network (RNN)-based evidential regression model, which can predict a vessel's trajectory at future timesteps with its corresponding prediction uncertainty. This paper proposes the usage of a deep learning (DL)-based uncertainty estimation in detecting maritime anomalies, such as unusual vessel maneuvering. Furthermore, we utilize the evidential deep learning classifiers to detect unusual turns of vessels and the loss of AIS signal using predicted class probabilities with associated uncertainties. Our experimental results suggest that using graph-based clustered data improves the ability of the DL models to learn the temporal-spatial correlation of data and associated uncertainties. Using different AIS datasets and experiments, we demonstrate that the estimated prediction uncertainty yields fundamental information for the detection of traffic anomalies in the maritime and, possibly in other domains.
Effective injury forecasting in soccer with GPS training data and machine learning
Nov 05, 2018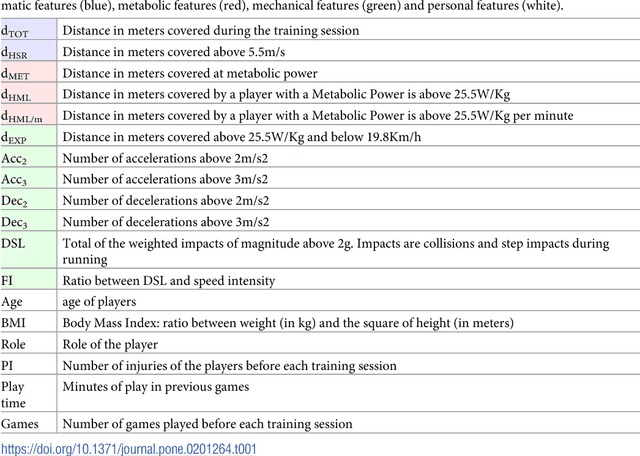
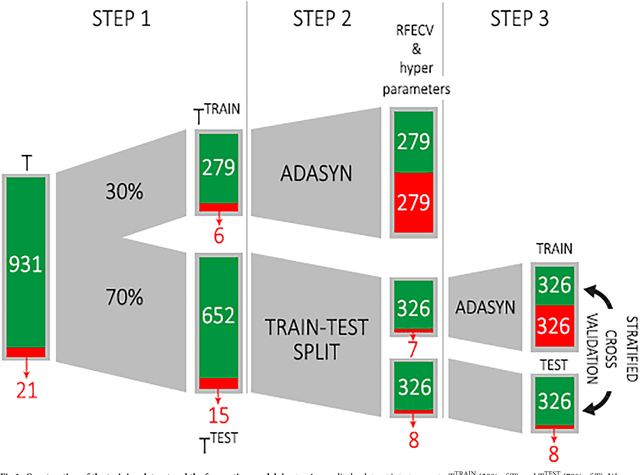
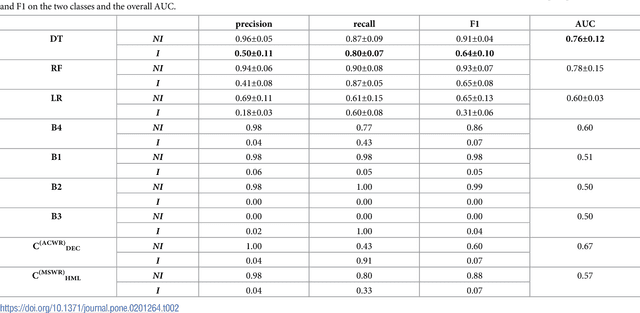
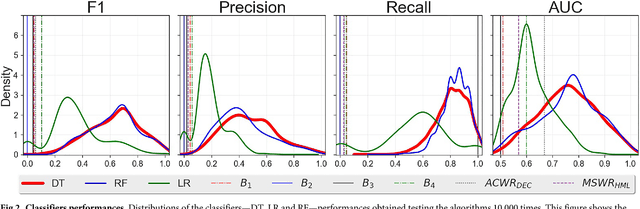
Injuries have a great impact on professional soccer, due to their large influence on team performance and the considerable costs of rehabilitation for players. Existing studies in the literature provide just a preliminary understanding of which factors mostly affect injury risk, while an evaluation of the potential of statistical models in forecasting injuries is still missing. In this paper, we propose a multi-dimensional approach to injury forecasting in professional soccer that is based on GPS measurements and machine learning. By using GPS tracking technology, we collect data describing the training workload of players in a professional soccer club during a season. We then construct an injury forecaster and show that it is both accurate and interpretable by providing a set of case studies of interest to soccer practitioners. Our approach opens a novel perspective on injury prevention, providing a set of simple and practical rules for evaluating and interpreting the complex relations between injury risk and training performance in professional soccer.