 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian and Neural Inference on LSTM-based Object Recognition from Tactile and Kinesthetic Information
Jun 10, 2023



Recent advances in the field of intelligent robotic manipulation pursue providing robotic hands with touch sensitivity. Haptic perception encompasses the sensing modalities encountered in the sense of touch (e.g., tactile and kinesthetic sensations). This letter focuses on multimodal object recognition and proposes analytical and data-driven methodologies to fuse tactile- and kinesthetic-based classification results. The procedure is as follows: a three-finger actuated gripper with an integrated high-resolution tactile sensor performs squeeze-and-release Exploratory Procedures (EPs). The tactile images and kinesthetic information acquired using angular sensors on the finger joints constitute the time-series datasets of interest. Each temporal dataset is fed to a Long Short-term Memory (LSTM) Neural Network, which is trained to classify in-hand objects. The LSTMs provide an estimation of the posterior probability of each object given the corresponding measurements, which after fusion allows to estimate the object through Bayesian and Neural inference approaches. An experiment with 36-classes is carried out to evaluate and compare the performance of the fused, tactile, and kinesthetic perception systems.The results show that the Bayesian-based classifiers improves capabilities for object recognition and outperforms the Neural-based approach.
CNN-based Methods for Object Recognition with High-Resolution Tactile Sensors
May 21, 2023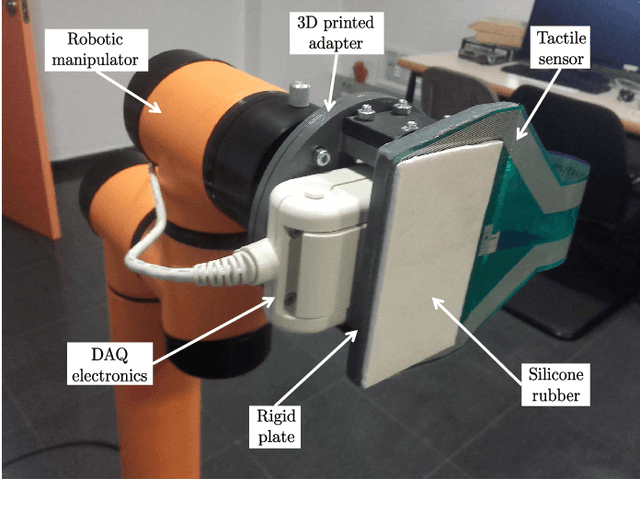
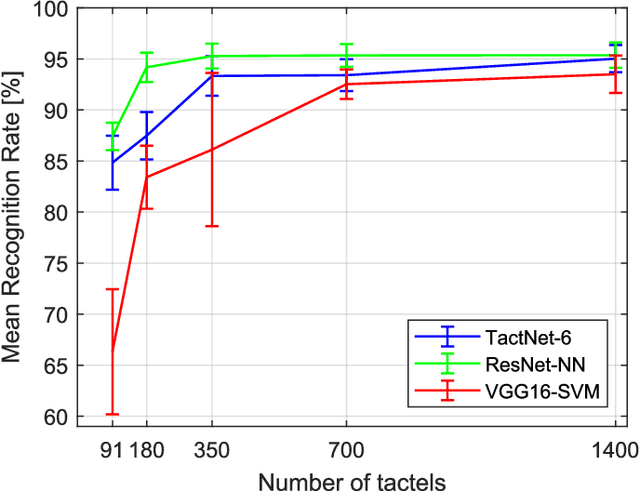
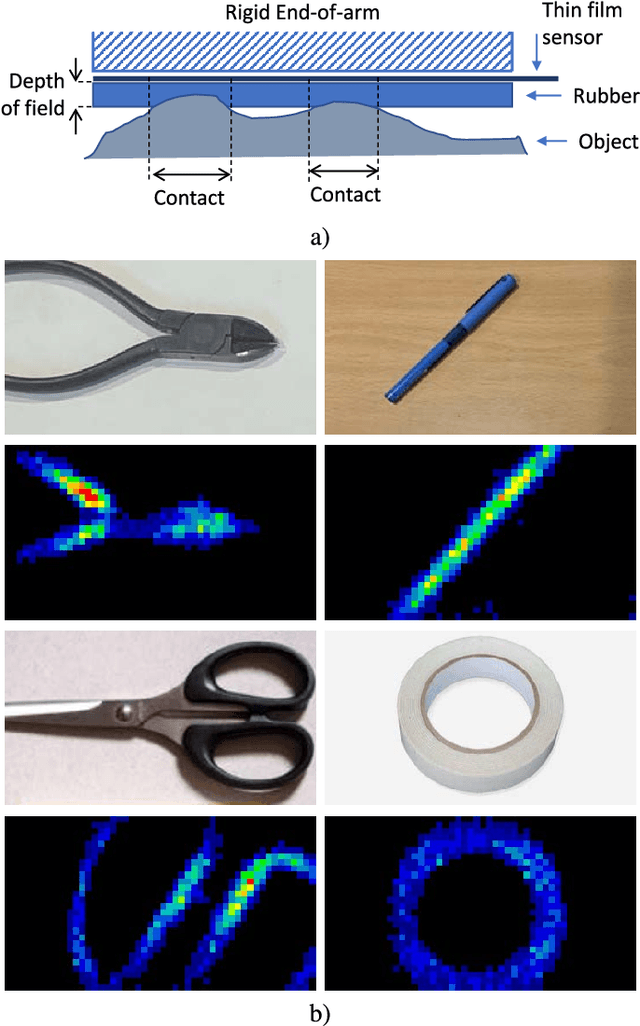
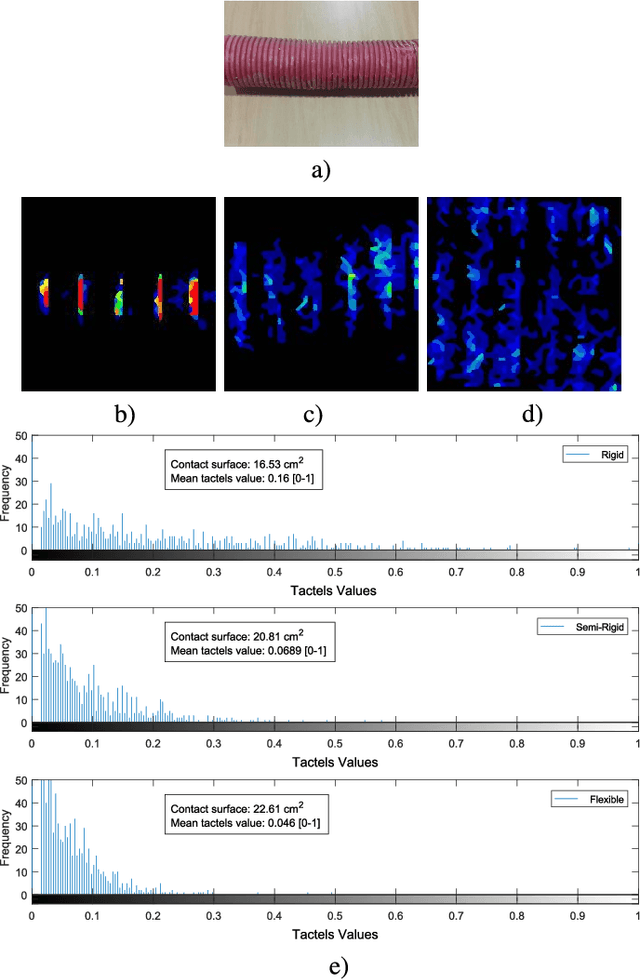
Novel high-resolution pressure-sensor arrays allow treating pressure readings as standard images. Computer vision algorithms and methods such as Convolutional Neural Networks (CNN) can be used to identify contact objects. In this paper, a high-resolution tactile sensor has been attached to a robotic end-effector to identify contacted objects. Two CNN-based approaches have been employed to classify pressure images. These methods include a transfer learning approach using a pre-trained CNN on an RGB-images dataset and a custom-made CNN (TactNet) trained from scratch with tactile information. The transfer learning approach can be carried out by retraining the classification layers of the network or replacing these layers with an SVM. Overall, 11 configurations based on these methods have been tested: 8 transfer learning-based, and 3 TactNet-based. Moreover, a study of the performance of the methods and a comparative discussion with the current state-of-the-art on tactile object recognition is presented.