 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecursive Deep Inverse Reinforcement Learning
Apr 21, 2025Inferring an adversary's goals from exhibited behavior is crucial for counterplanning and non-cooperative multi-agent systems in domains like cybersecurity, military, and strategy games. Deep Inverse Reinforcement Learning (IRL) methods based on maximum entropy principles show promise in recovering adversaries' goals but are typically offline, require large batch sizes with gradient descent, and rely on first-order updates, limiting their applicability in real-time scenarios. We propose an online Recursive Deep Inverse Reinforcement Learning (RDIRL) approach to recover the cost function governing the adversary actions and goals. Specifically, we minimize an upper bound on the standard Guided Cost Learning (GCL) objective using sequential second-order Newton updates, akin to the Extended Kalman Filter (EKF), leading to a fast (in terms of convergence) learning algorithm. We demonstrate that RDIRL is able to recover cost and reward functions of expert agents in standard and adversarial benchmark tasks. Experiments on benchmark tasks show that our proposed approach outperforms several leading IRL algorithms.
Active Learning For Repairable Hardware Systems With Partial Coverage
Mar 20, 2025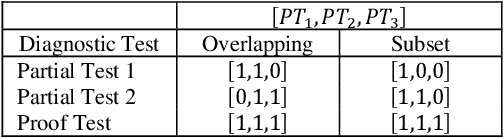
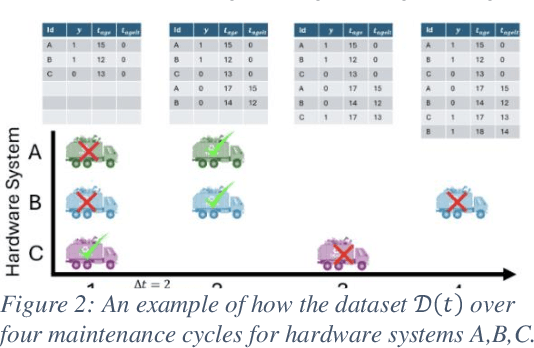

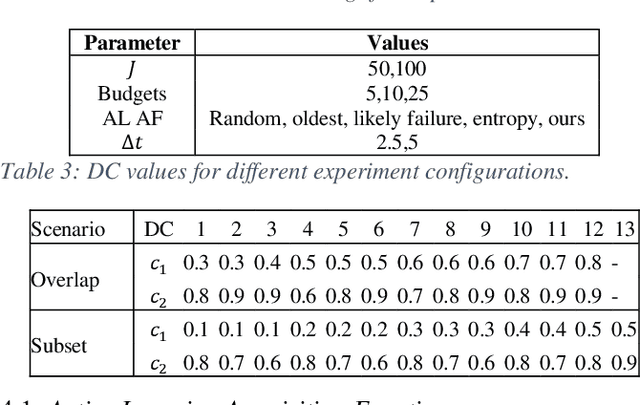
Identifying the optimal diagnostic test and hardware system instance to infer reliability characteristics using field data is challenging, especially when constrained by fixed budgets and minimal maintenance cycles. Active Learning (AL) has shown promise for parameter inference with limited data and budget constraints in machine learning/deep learning tasks. However, AL for reliability model parameter inference remains underexplored for repairable hardware systems. It requires specialized AL Acquisition Functions (AFs) that consider hardware aging and the fact that a hardware system consists of multiple sub-systems, which may undergo only partial testing during a given diagnostic test. To address these challenges, we propose a relaxed Mixed Integer Semidefinite Program (MISDP) AL AF that incorporates Diagnostic Coverage (DC), Fisher Information Matrices (FIMs), and diagnostic testing budgets. Furthermore, we design empirical-based simulation experiments focusing on two diagnostic testing scenarios: (1) partial tests of a hardware system with overlapping subsystem coverage, and (2) partial tests where one diagnostic test fully subsumes the subsystem coverage of another. We evaluate our proposed approach against the most widely used AL AF in the literature (entropy), as well as several intuitive AL AFs tailored for reliability model parameter inference. Our proposed AF ranked best on average among the alternative AFs across 6,000 experimental configurations, with respect to Area Under the Curve (AUC) of the Absolute Total Expected Event Error (ATEER) and Mean Squared Error (MSE) curves, with statistical significance calculated at a 0.05 alpha level using a Friedman hypothesis test.
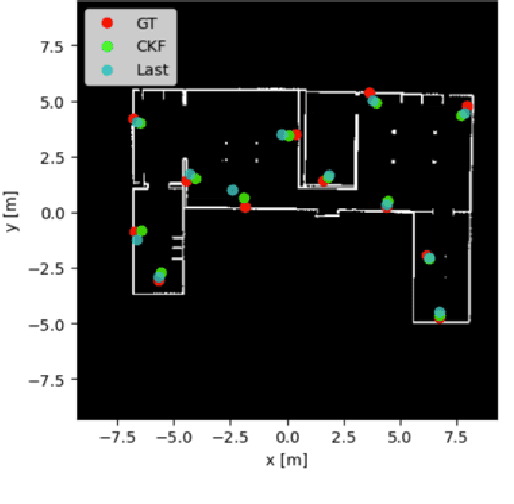
Continuously Optimizing Radar Placement with Model Predictive Path Integrals
May 30, 2024Continuously optimizing sensor placement is essential for precise target localization in various military and civilian applications. While information theory has shown promise in optimizing sensor placement, many studies oversimplify sensor measurement models or neglect dynamic constraints of mobile sensors. To address these challenges, we employ a range measurement model that incorporates radar parameters and radar-target distance, coupled with Model Predictive Path Integral (MPPI) control to manage complex environmental obstacles and dynamic constraints. We compare the proposed approach against stationary radars or simplified range measurement models based on the root mean squared error (RMSE) of the Cubature Kalman Filter (CKF) estimator for the targets' state. Additionally, we visualize the evolving geometry of radars and targets over time, highlighting areas of highest measurement information gain, demonstrating the strengths of the approach. The proposed strategy outperforms stationary radars and simplified range measurement models in target localization, achieving a 38-74% reduction in mean RMSE and a 33-79% reduction in the upper tail of the 90% Highest Density Interval (HDI) over 500 Monte Carl (MC) trials across all time steps. Code will be made publicly available upon acceptance.
Autonomous Robot for Disaster Mapping and Victim Localization
Apr 21, 2024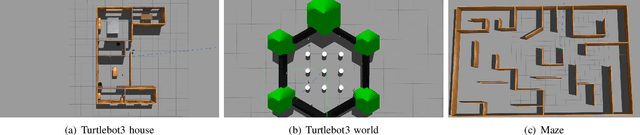
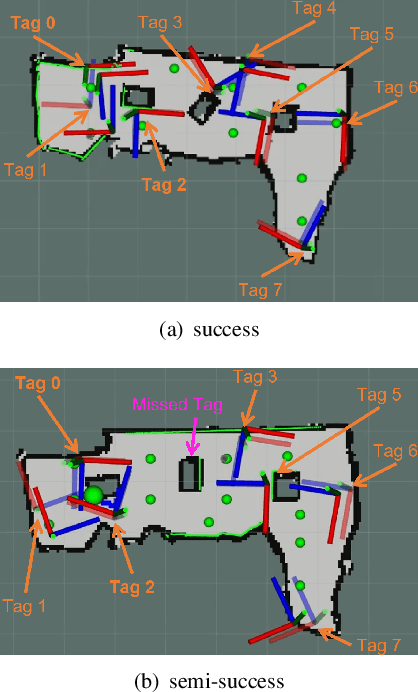
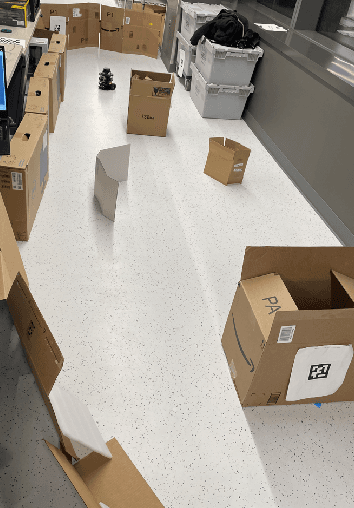
In response to the critical need for effective reconnaissance in disaster scenarios, this research article presents the design and implementation of a complete autonomous robot system using the Turtlebot3 with Robotic Operating System (ROS) Noetic. Upon deployment in closed, initially unknown environments, the system aims to generate a comprehensive map and identify any present 'victims' using AprilTags as stand-ins. We discuss our solution for search and rescue missions, while additionally exploring more advanced algorithms to improve search and rescue functionalities. We introduce a Cubature Kalman Filter to help reduce the mean squared error [m] for AprilTag localization and an information-theoretic exploration algorithm to expedite exploration in unknown environments. Just like turtles, our system takes it slow and steady, but when it's time to save the day, it moves at ninja-like speed! Despite Donatello's shell, he's no slowpoke - he zips through obstacles with the agility of a teenage mutant ninja turtle. So, hang on tight to your shells and get ready for a whirlwind of reconnaissance! Full pipeline code https://github.com/rzhao5659/MRProject/tree/main Exploration code https://github.com/rzhao5659/MRProject/tree/main
Multistatic-Radar RCS-Signature Recognition of Aerial Vehicles: A Bayesian Fusion Approach
Mar 08, 2024



Radar Automated Target Recognition (RATR) for Unmanned Aerial Vehicles (UAVs) involves transmitting Electromagnetic Waves (EMWs) and performing target type recognition on the received radar echo, crucial for defense and aerospace applications. Previous studies highlighted the advantages of multistatic radar configurations over monostatic ones in RATR. However, fusion methods in multistatic radar configurations often suboptimally combine classification vectors from individual radars probabilistically. To address this, we propose a fully Bayesian RATR framework employing Optimal Bayesian Fusion (OBF) to aggregate classification probability vectors from multiple radars. OBF, based on expected 0-1 loss, updates a Recursive Bayesian Classification (RBC) posterior distribution for target UAV type, conditioned on historical observations across multiple time steps. We evaluate the approach using simulated random walk trajectories for seven drones, correlating target aspect angles to Radar Cross Section (RCS) measurements in an anechoic chamber. Comparing against single radar Automated Target Recognition (ATR) systems and suboptimal fusion methods, our empirical results demonstrate that the OBF method integrated with RBC significantly enhances classification accuracy compared to other fusion methods and single radar configurations.
Robust Survival Analysis with Adversarial Regularization
Dec 26, 2023



Survival Analysis (SA) is about modeling the time for an event of interest to occur, which has important applications in many fields, including medicine, defense, finance, and aerospace. Recent work has demonstrated the benefits of using Neural Networks (NNs) to capture complicated relationships in SA. However, the datasets used to train these models are often subject to uncertainty (e.g., noisy measurements, human error), which we show can substantially degrade the performance of existing techniques. To address this issue, this work leverages recent advances in NN verification to provide new algorithms for generating fully parametric survival models that are robust to such uncertainties. In particular, we introduce a robust loss function for training the models and use CROWN-IBP regularization to address the computational challenges with solving the resulting Min-Max problem. To evaluate the proposed approach, we apply relevant perturbations to publicly available datasets in the SurvSet repository and compare survival models against several baselines. We empirically show that Survival Analysis with Adversarial Regularization (SAWAR) method on average ranks best for dataset perturbations of varying magnitudes on metrics such as Negative Log Likelihood (NegLL), Integrated Brier Score (IBS), and Concordance Index (CI), concluding that adversarial regularization enhances performance in SA. Code: https://github.com/mlpotter/SAWAR
Do Bayesian Neural Networks Weapon System Improve Predictive Maintenance?
Dec 16, 2023We implement a Bayesian inference process for Neural Networks to model the time to failure of highly reliable weapon systems with interval-censored data and time-varying covariates. We analyze and benchmark our approach, LaplaceNN, on synthetic and real datasets with standard classification metrics such as Receiver Operating Characteristic (ROC) Area Under Curve (AUC) Precision-Recall (PR) AUC, and reliability curve visualizations.
Bayesian Weapon System Reliability Modeling with Cox-Weibull Neural Network
Jan 11, 2023We propose to integrate weapon system features (such as weapon system manufacturer, deployment time and location, storage time and location, etc.) into a parameterized Cox-Weibull [1] reliability model via a neural network, like DeepSurv [2], to improve predictive maintenance. In parallel, we develop an alternative Bayesian model by parameterizing the Weibull parameters with a neural network and employing dropout methods such as Monte-Carlo (MC)-dropout for comparative purposes. Due to data collection procedures in weapon system testing we employ a novel interval-censored log-likelihood which incorporates Monte-Carlo Markov Chain (MCMC) [3] sampling of the Weibull parameters during gradient descent optimization. We compare classification metrics such as receiver operator curve (ROC) area under the curve (AUC), precision-recall (PR) AUC, and F scores to show our model generally outperforms traditional powerful models such as XGBoost and the current standard conditional Weibull probability density estimation model.
Adversarial Focal Loss: Asking Your Discriminator for Hard Examples
Jul 15, 2022
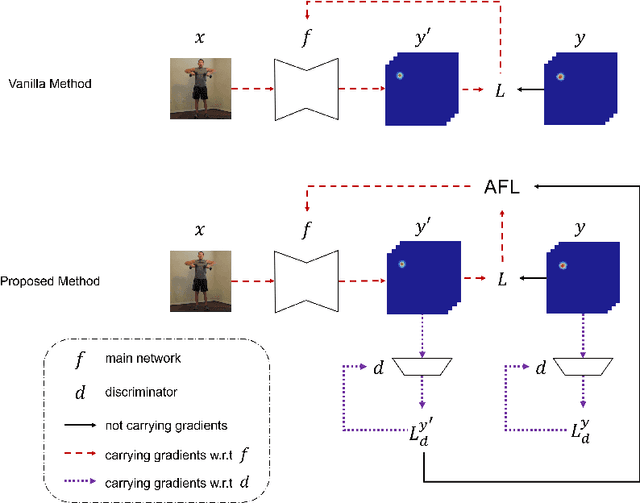
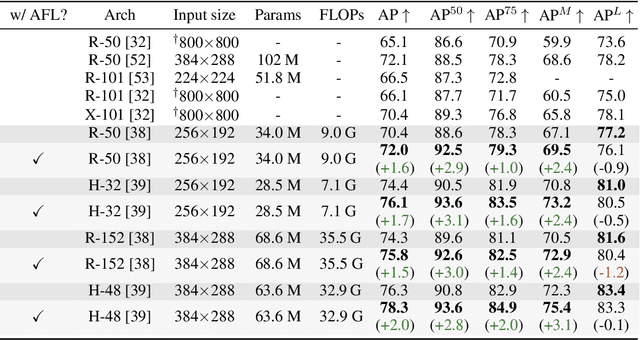
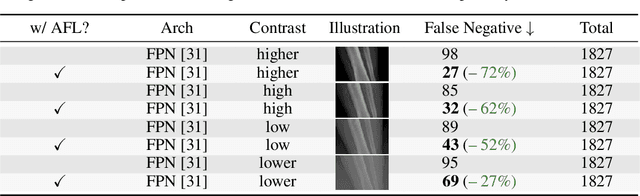
Focal Loss has reached incredible popularity as it uses a simple technique to identify and utilize hard examples to achieve better performance on classification. However, this method does not easily generalize outside of classification tasks, such as in keypoint detection. In this paper, we propose a novel adaptation of Focal Loss for keypoint detection tasks, called Adversarial Focal Loss (AFL). AFL not only is semantically analogous to Focal loss, but also works as a plug-and-chug upgrade for arbitrary loss functions. While Focal Loss requires output from a classifier, AFL leverages a separate adversarial network to produce a difficulty score for each input. This difficulty score can then be used to dynamically prioritize learning on hard examples, even in absence of a classifier. In this work, we show AFL's effectiveness in enhancing existing methods in keypoint detection and verify its capability to re-weigh examples based on difficulty.
To Raise or Not To Raise: The Autonomous Learning Rate Question
Jun 16, 2021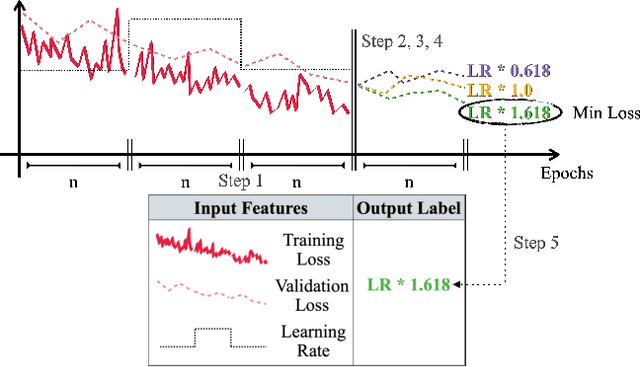
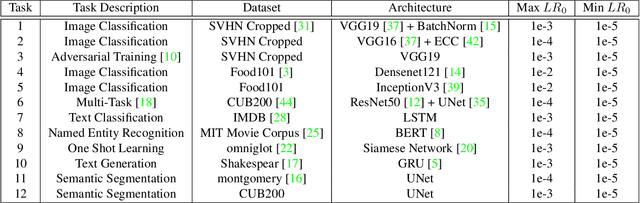

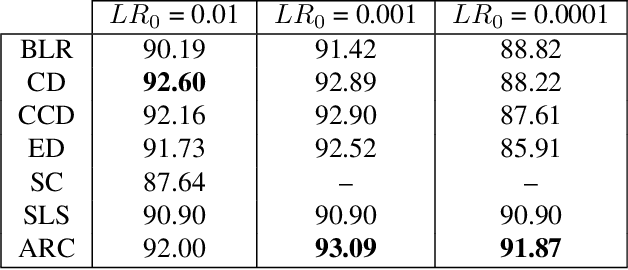
There is a parameter ubiquitous throughout the deep learning world: learning rate. There is likewise a ubiquitous question: what should that learning rate be? The true answer to this question is often tedious and time consuming to obtain, and a great deal of arcane knowledge has accumulated in recent years over how to pick and modify learning rates to achieve optimal training performance. Moreover, the long hours spent carefully crafting the perfect learning rate can come to nothing the moment your network architecture, optimizer, dataset, or initial conditions change ever so slightly. But it need not be this way. We propose a new answer to the great learning rate question: the Autonomous Learning Rate Controller. Find it at https://github.com/fastestimator/ARC