 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecursive Deep Inverse Reinforcement Learning
Apr 21, 2025Inferring an adversary's goals from exhibited behavior is crucial for counterplanning and non-cooperative multi-agent systems in domains like cybersecurity, military, and strategy games. Deep Inverse Reinforcement Learning (IRL) methods based on maximum entropy principles show promise in recovering adversaries' goals but are typically offline, require large batch sizes with gradient descent, and rely on first-order updates, limiting their applicability in real-time scenarios. We propose an online Recursive Deep Inverse Reinforcement Learning (RDIRL) approach to recover the cost function governing the adversary actions and goals. Specifically, we minimize an upper bound on the standard Guided Cost Learning (GCL) objective using sequential second-order Newton updates, akin to the Extended Kalman Filter (EKF), leading to a fast (in terms of convergence) learning algorithm. We demonstrate that RDIRL is able to recover cost and reward functions of expert agents in standard and adversarial benchmark tasks. Experiments on benchmark tasks show that our proposed approach outperforms several leading IRL algorithms.
Learning Physics Informed Neural ODEs With Partial Measurements
Dec 11, 2024



Learning dynamics governing physical and spatiotemporal processes is a challenging problem, especially in scenarios where states are partially measured. In this work, we tackle the problem of learning dynamics governing these systems when parts of the system's states are not measured, specifically when the dynamics generating the non-measured states are unknown. Inspired by state estimation theory and Physics Informed Neural ODEs, we present a sequential optimization framework in which dynamics governing unmeasured processes can be learned. We demonstrate the performance of the proposed approach leveraging numerical simulations and a real dataset extracted from an electro-mechanical positioning system. We show how the underlying equations fit into our formalism and demonstrate the improved performance of the proposed method when compared with baselines.
Continuously Optimizing Radar Placement with Model Predictive Path Integrals
May 30, 2024Continuously optimizing sensor placement is essential for precise target localization in various military and civilian applications. While information theory has shown promise in optimizing sensor placement, many studies oversimplify sensor measurement models or neglect dynamic constraints of mobile sensors. To address these challenges, we employ a range measurement model that incorporates radar parameters and radar-target distance, coupled with Model Predictive Path Integral (MPPI) control to manage complex environmental obstacles and dynamic constraints. We compare the proposed approach against stationary radars or simplified range measurement models based on the root mean squared error (RMSE) of the Cubature Kalman Filter (CKF) estimator for the targets' state. Additionally, we visualize the evolving geometry of radars and targets over time, highlighting areas of highest measurement information gain, demonstrating the strengths of the approach. The proposed strategy outperforms stationary radars and simplified range measurement models in target localization, achieving a 38-74% reduction in mean RMSE and a 33-79% reduction in the upper tail of the 90% Highest Density Interval (HDI) over 500 Monte Carl (MC) trials across all time steps. Code will be made publicly available upon acceptance.
How Strong a Kick Should be to Topple Northeastern's Tumbling Robot?
Nov 25, 2023



Rough terrain locomotion has remained one of the most challenging mobility questions. In 2022, NASA's Innovative Advanced Concepts (NIAC) Program invited US academic institutions to participate NASA's Breakthrough, Innovative \& Game-changing (BIG) Idea competition by proposing novel mobility systems that can negotiate extremely rough terrain, lunar bumpy craters. In this competition, Northeastern University won NASA's top Artemis Award award by proposing an articulated robot tumbler called COBRA (Crater Observing Bio-inspired Rolling Articulator). This report briefly explains the underlying principles that made COBRA successful in competing with other concepts ranging from cable-driven to multi-legged designs from six other participating US institutions.
Hovering Control of Flapping Wings in Tandem with Multi-Rotors
Jul 31, 2023



This work briefly covers our efforts to stabilize the flight dynamics of Northeastern's tailless bat-inspired micro aerial vehicle, Aerobat. Flapping robots are not new. A plethora of examples is mainly dominated by insect-style design paradigms that are passively stable. However, Aerobat, in addition for being tailless, possesses morphing wings that add to the inherent complexity of flight control. The robot can dynamically adjust its wing platform configurations during gait cycles, increasing its efficiency and agility. We employ a guard design with manifold small thrusters to stabilize Aerobat's position and orientation in hovering, a flapping system in tandem with a multi-rotor. For flight control purposes, we take an approach based on assuming the guard cannot observe Aerobat's states. Then, we propose an observer to estimate the unknown states of the guard which are then used for closed-loop hovering control of the Guard-Aerobat platform.
Unsteady aerodynamic modeling of Aerobat using lifting line theory and Wagner's function
Jul 25, 2022


Flying animals possess highly complex physical characteristics and are capable of performing agile maneuvers using their wings. The flapping wings generate complex wake structures that influence the aerodynamic forces, which can be difficult to model. While it is possible to model these forces using fluid-structure interaction, it is very computationally expensive and difficult to formulate. In this paper, we follow a simpler approach by deriving the aerodynamic forces using a relatively small number of states and presenting them in a simple state-space form. The formulation utilizes Prandtl's lifting line theory and Wagner's function to determine the unsteady aerodynamic forces acting on the wing in a simulation, which then are compared to experimental data of the bat-inspired robot called the Aerobat. The simulated trailing-edge vortex shedding can be evaluated from this model, which then can be analyzed for a wake-based gait design approach to improve the aerodynamic performance of the robot.
Bang-Bang Control Of A Tail-less Morphing Wing Flight
May 12, 2022



Bats' dynamic morphing wings are known to be extremely high-dimensional, and they employ the combination of inertial dynamics and aerodynamics manipulations to showcase extremely agile maneuvers. Bats heavily rely on their highly flexible wings and are capable of dynamically morphing their wings to adjust aerodynamic and inertial forces applied to their wing and perform sharp banking turns. There are technical hardware and control challenges in copying the morphing wing flight capabilities of flying animals. This work is majorly focused on the modeling and control aspects of stable, tail-less, morphing wing flight. A classical control approach using bang-bang control is proposed to stabilize a bio-inspired morphing wing robot called Aerobat. Robot-environment interactions based on horseshoe vortex shedding and Wagner functions is derived to realistically evaluate the feasibility of the bang-bang control, which is then implemented on the robot in experiments to demonstrate first-time closed-loop stable flights of Aerobat.
Efficient Path Planning and Tracking for Multi-Modal Legged-Aerial Locomotion Using Integrated Probabilistic Road Maps (PRM) and Reference Governors (RG)
May 12, 2022

There have been several successful implementations of bio-inspired legged robots that can trot, walk, and hop robustly even in the presence of significant unplanned disturbances. Despite all of these accomplishments, practical control and high-level decision-making algorithms in multi-modal legged systems are overlooked. In nature, animals such as birds impressively showcase multiple modes of mobility including legged and aerial locomotion. They are capable of performing robust locomotion over large walls, tight spaces, and can recover from unpredictable situations such as sudden gusts or slippery surfaces. Inspired by these animals' versatility and ability to combine legged and aerial mobility to negotiate their environment, our main goal is to design and control legged robots that integrate two completely different forms of locomotion, ground and aerial mobility, in a single platform. Our robot, the Husky Carbon, is being developed to integrate aerial and legged locomotion and to transform between legged and aerial mobility. This work utilizes a Reference Governor (RG) based on low-level control of Husky's dynamical model to maintain the efficiency of legged locomotion, uses Probabilistic Road Maps (PRM) and 3D A* algorithms to generate an optimal path based on the energetic cost of transport for legged and aerial mobility
Efficient Modeling of Morphing Wing Flight Using Neural Networks and Cubature Rules
Oct 03, 2021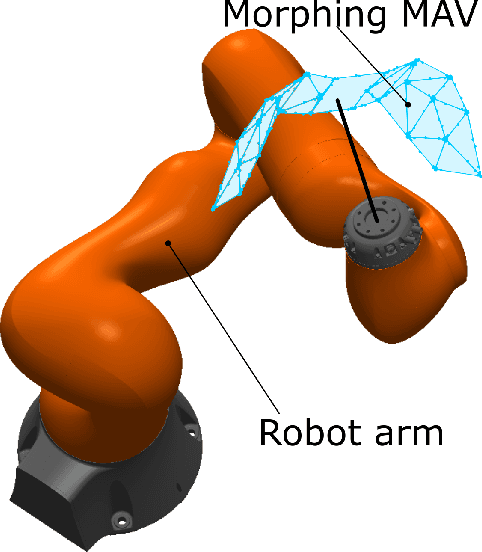
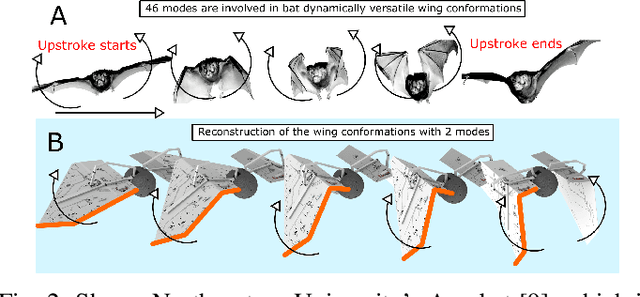
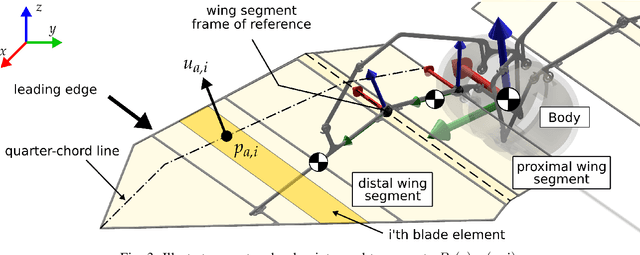
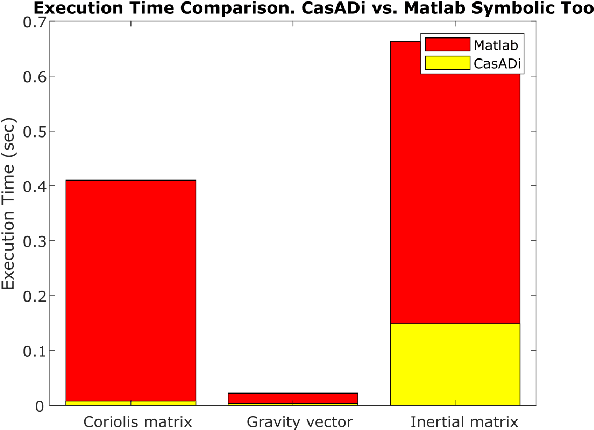
Fluidic locomotion of flapping Micro Aerial Vehicles (MAVs) can be very complex, particularly when the rules from insect flight dynamics (fast flapping dynamics and light wings) are not applicable. In these situations, widely used averaging techniques can fail quickly. The primary motivation is to find efficient models for complex forms of aerial locomotion where wings constitute a large part of body mass (i.e., dominant inertial effects) and deform in multiple directions (i.e., morphing wing). In these systems, high degrees of freedom yields complex inertial, Coriolis, and gravity terms. We use Algorithmic Differentiation (AD) and Bayesian filters computed with cubature rules conjointly to quickly estimate complex fluid-structure interactions. In general, Bayesian filters involve finding complex numerical integration (e.g., find posterior integrals). Using cubature rules to compute Gaussian-weighted integrals and AD, we show that the complex multi-degrees-of-freedom dynamics of morphing MAVs can be computed very efficiently and accurately. Therefore, our work facilitates closed-loop feedback control of these morphing MAVs.