 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadrupedal Locomotion Control On Inclined Surfaces Using Collocation Method
Dec 14, 2023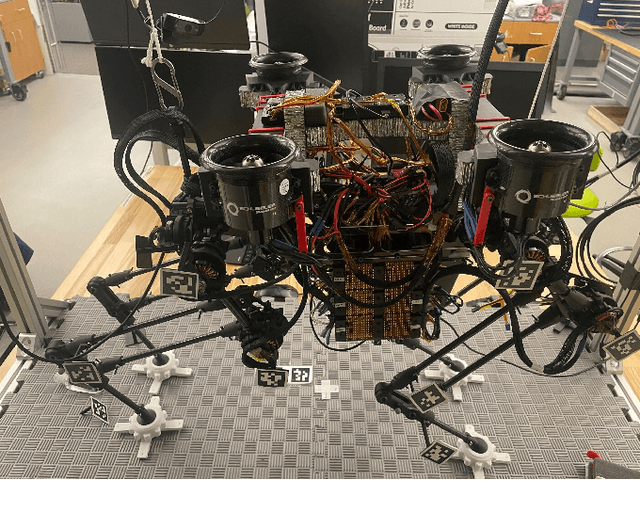
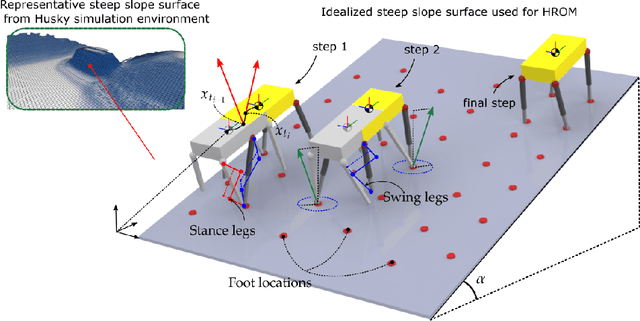
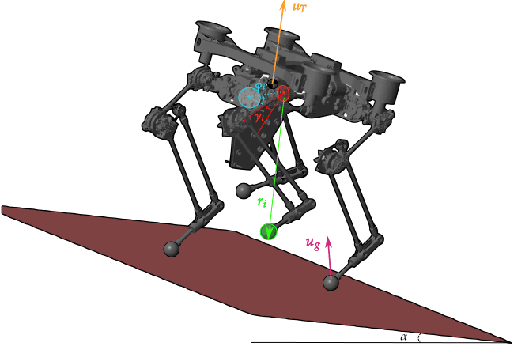
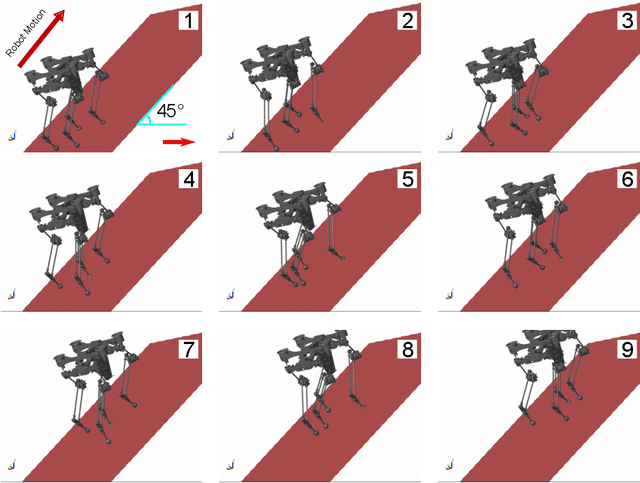
Inspired by Chukars wing-assisted incline running (WAIR), in this work, we employ a high-fidelity model of our Husky Carbon quadrupedal-legged robot to walk over steep slopes of up to 45 degrees. Chukars use the aerodynamic forces generated by their flapping wings to manipulate ground contact forces and traverse steep slopes and even overhangs. By exploiting the thrusters on Husky, we employed a collocation approach to rapidly resolving the joint and thruster actions. Our approach uses a polynomial approximation of the reduced-order dynamics of Husky, called HROM, to quickly and efficiently find optimal control actions that permit high-slope walking without violating friction cone conditions.
How Strong a Kick Should be to Topple Northeastern's Tumbling Robot?
Nov 25, 2023



Rough terrain locomotion has remained one of the most challenging mobility questions. In 2022, NASA's Innovative Advanced Concepts (NIAC) Program invited US academic institutions to participate NASA's Breakthrough, Innovative \& Game-changing (BIG) Idea competition by proposing novel mobility systems that can negotiate extremely rough terrain, lunar bumpy craters. In this competition, Northeastern University won NASA's top Artemis Award award by proposing an articulated robot tumbler called COBRA (Crater Observing Bio-inspired Rolling Articulator). This report briefly explains the underlying principles that made COBRA successful in competing with other concepts ranging from cable-driven to multi-legged designs from six other participating US institutions.
Hovering Control of Flapping Wings in Tandem with Multi-Rotors
Jul 31, 2023



This work briefly covers our efforts to stabilize the flight dynamics of Northeastern's tailless bat-inspired micro aerial vehicle, Aerobat. Flapping robots are not new. A plethora of examples is mainly dominated by insect-style design paradigms that are passively stable. However, Aerobat, in addition for being tailless, possesses morphing wings that add to the inherent complexity of flight control. The robot can dynamically adjust its wing platform configurations during gait cycles, increasing its efficiency and agility. We employ a guard design with manifold small thrusters to stabilize Aerobat's position and orientation in hovering, a flapping system in tandem with a multi-rotor. For flight control purposes, we take an approach based on assuming the guard cannot observe Aerobat's states. Then, we propose an observer to estimate the unknown states of the guard which are then used for closed-loop hovering control of the Guard-Aerobat platform.