 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConjugate Momentum-Based Estimation of External Forces for Bio-Inspired Morphing Wing Flight
Nov 18, 2024
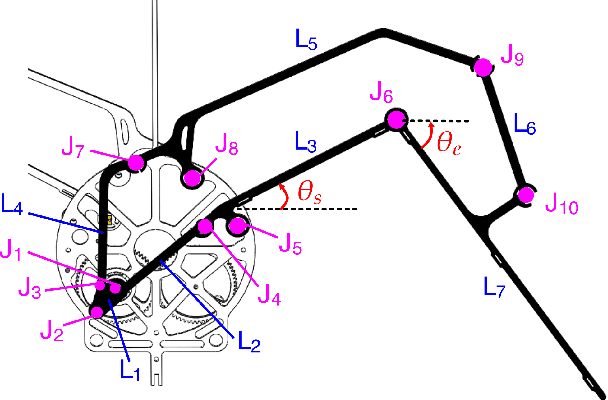
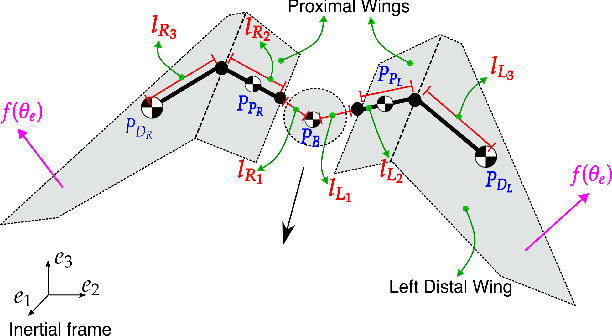
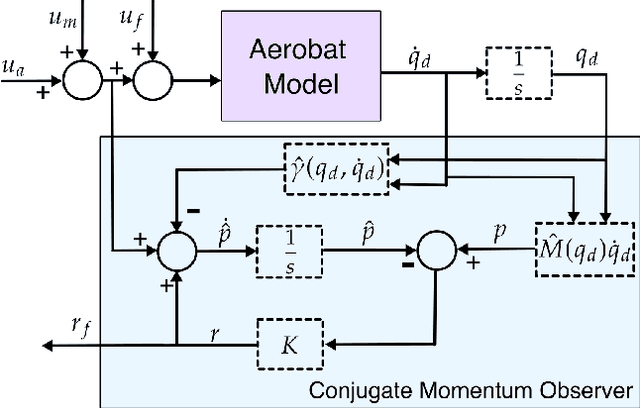
Dynamic morphing wing flights present significant challenges in accurately estimating external forces due to complex interactions between aerodynamics, rapid wing movements, and external disturbances. Traditional force estimation methods often struggle with unpredictable disturbances like wind gusts or unmodeled impacts that can destabilize flight in real-world scenarios. This paper addresses these challenges by implementing a Conjugate Momentum-based Observer, which effectively estimates and manages unknown external forces acting on the Aerobat, a bio-inspired robotic platform with dynamically morphing wings. Through simulations, the observer demonstrates its capability to accurately detect and quantify external forces, even in the presence of Gaussian noise and abrupt impulse inputs. The results validate the robustness of the method, showing improved stability and control of the Aerobat in dynamic environments. This research contributes to advancements in bio-inspired robotics by enhancing force estimation for flapping-wing systems, with potential applications in autonomous aerial navigation and robust flight control.
Capture Point Control in Thruster-Assisted Bipedal Locomotion
Jun 21, 2024



Despite major advancements in control design that are robust to unplanned disturbances, bipedal robots are still susceptible to falling over and struggle to negotiate rough terrains. By utilizing thrusters in our bipedal robot, we can perform additional posture manipulation and expand the modes of locomotion to enhance the robot's stability and ability to negotiate rough and difficult-to-navigate terrains. In this paper, we present our efforts in designing a controller based on capture point control for our thruster-assisted walking model named Harpy and explore its control design possibilities. While capture point control based on centroidal models for bipedal systems has been extensively studied, the incorporation of external forces that can influence the dynamics of linear inverted pendulum models, often used in capture point-based works, has not been explored before. The inclusion of these external forces can lead to interesting interpretations of locomotion, such as virtual buoyancy studied in aquatic-legged locomotion. This paper outlines the dynamical model of our robot, the capture point method we use to assist the upper body stabilization, and the simulation work done to show the controller's feasibility.
Modeling and Controls of Fluid-Structure Interactions (FSI) in Dynamic Morphing Flight
Jun 18, 2024



The primary aim of this study is to enhance the accuracy of our aerodynamic Fluid-Structure Interaction (FSI) model to support the controlled tracking of 3D flight trajectories by Aerobat, which is a dynamic morphing winged drone. Building upon our previously documented Unsteady Aerodynamic model rooted in horseshoe vortices, we introduce a new iteration of Aerobat, labeled as version beta, which is designed for attachment to a Kinova arm. Through a series of experiments, we gather force-moment data from the robotic arm attachment and utilize it to fine-tune our unsteady model for banking turn maneuvers. Subsequently, we employ the tuned FSI model alongside a collocation control strategy to accomplish 3D banking turns of Aerobat within simulation environments. The primary contribution lies in presenting a methodical approach to calibrate our FSI model to predict complex 3D maneuvers and successfully assessing the model's potential for closed-loop flight control of Aerobat using an optimization-based collocation method.
Banking Turn of High-DOF Dynamic Morphing Wing Flight by Shifting Structure Response Using Optimization
May 09, 2024



The 3D flight control of a flapping wing robot is a very challenging problem. The robot stabilizes and controls its pose through the aerodynamic forces acting on the wing membrane which has complex dynamics and it is difficult to develop a control method to interact with such a complex system. Bats, in particular, are capable of performing highly agile aerial maneuvers such as tight banking and bounding flight solely using their highly flexible wings. In this work, we develop a control method for a bio-inspired bat robot, the Aerobat, using small low-powered actuators to manipulate the flapping gait and the resulting aerodynamic forces. We implemented a controller based on collocation approach to track a desired roll and perform a banking maneuver to be used in a trajectory tracking controller. This controller is implemented in a simulation to show its performance and feasibility.
Hovering Control of Flapping Wings in Tandem with Multi-Rotors
Jul 31, 2023



This work briefly covers our efforts to stabilize the flight dynamics of Northeastern's tailless bat-inspired micro aerial vehicle, Aerobat. Flapping robots are not new. A plethora of examples is mainly dominated by insect-style design paradigms that are passively stable. However, Aerobat, in addition for being tailless, possesses morphing wings that add to the inherent complexity of flight control. The robot can dynamically adjust its wing platform configurations during gait cycles, increasing its efficiency and agility. We employ a guard design with manifold small thrusters to stabilize Aerobat's position and orientation in hovering, a flapping system in tandem with a multi-rotor. For flight control purposes, we take an approach based on assuming the guard cannot observe Aerobat's states. Then, we propose an observer to estimate the unknown states of the guard which are then used for closed-loop hovering control of the Guard-Aerobat platform.
A Letter on Progress Made on Husky Carbon: A Legged-Aerial, Multi-modal Platform
Jul 25, 2022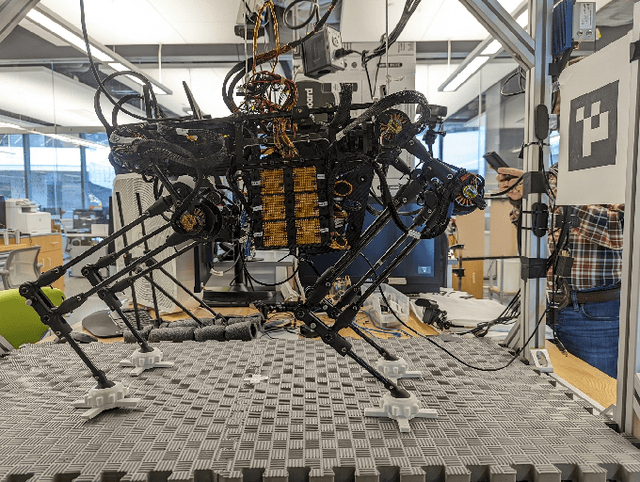
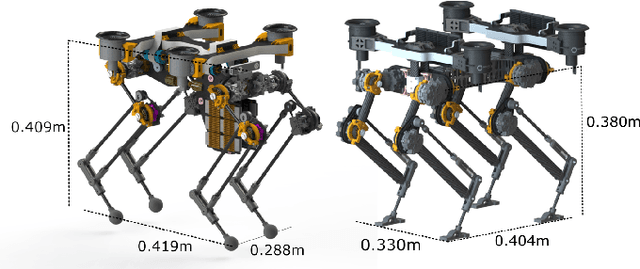
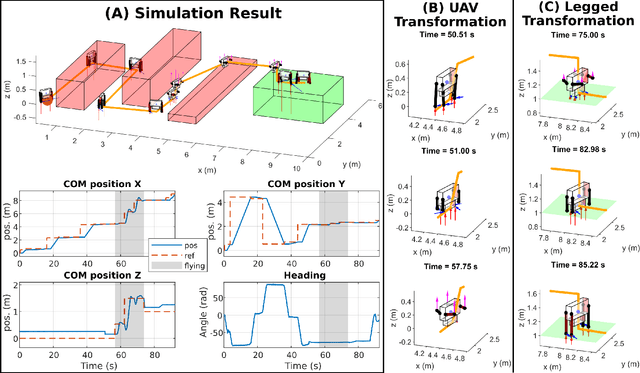
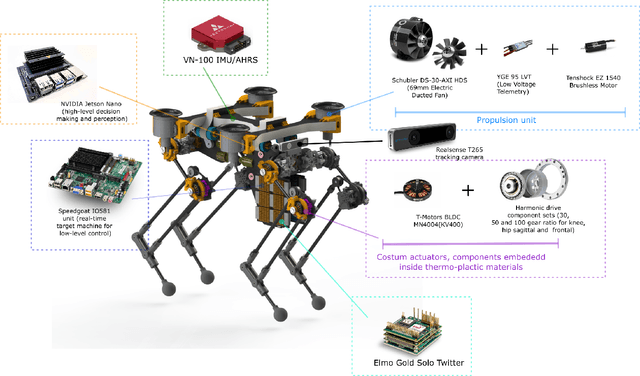
Animals, such as birds, widely use multi-modal locomotion by combining legged and aerial mobility with dominant inertial effects. The robotic biomimicry of this multi-modal locomotion feat can yield ultra-flexible systems in terms of their ability to negotiate their task spaces. The main objective of this paper is to discuss the challenges in achieving multi-modal locomotion, and to report our progress in developing our quadrupedal robot capable of multi-modal locomotion (legged and aerial locomotion), the Husky Carbon. We report the mechanical and electrical components utilized in our robot, in addition to the simulation and experimentation done to achieve our goal in developing a versatile multi-modal robotic platform.