 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Capture Point Control Using Thruster Dynamics and QP-Based Optimization for Harpy
Nov 21, 2024Our work aims to make significant strides in understanding unexplored locomotion control paradigms based on the integration of posture manipulation and thrust vectoring. These techniques are commonly seen in nature, such as Chukar birds using their wings to run on a nearly vertical wall. In this work, we developed a capture-point-based controller integrated with a quadratic programming (QP) solver which is used to create a thruster-assisted dynamic bipedal walking controller for our state-of-the-art Harpy platform. Harpy is a bipedal robot capable of legged-aerial locomotion using its legs and thrusters attached to its main frame. While capture point control based on centroidal models for bipedal systems has been extensively studied, the use of these thrusters in determining the capture point for a bipedal robot has not been extensively explored. The addition of these external thrust forces can lead to interesting interpretations of locomotion, such as virtual buoyancy studied in aquatic-legged locomotion. In this work, we derive a thruster-assisted bipedal walking with the capture point controller and implement it in simulation to study its performance.
Conjugate momentum based thruster force estimate in dynamic multimodal robot
Nov 21, 2024In a multi-modal system which combines thruster and legged locomotion such our state-of-the-art Harpy platform to perform dynamic locomotion. Therefore, it is very important to have a proper estimate of Thruster force. Harpy is a bipedal robot capable of legged-aerial locomotion using its legs and thrusters attached to its main frame. we can characterize thruster force using a thrust stand but it generally does not account for working conditions such as battery voltage. In this study, we present a momentum-based thruster force estimator. One of the key information required to estimate is terrain information. we show estimation results with and without terrain knowledge. In this work, we derive a conjugate momentum thruster force estimator and implement it on a numerical simulator that uses thruster force to perform thruster-assisted walking.
Quadratic Programming Optimization for Bio-Inspired Thruster-Assisted Bipedal Locomotion on Inclined Slopes
Nov 20, 2024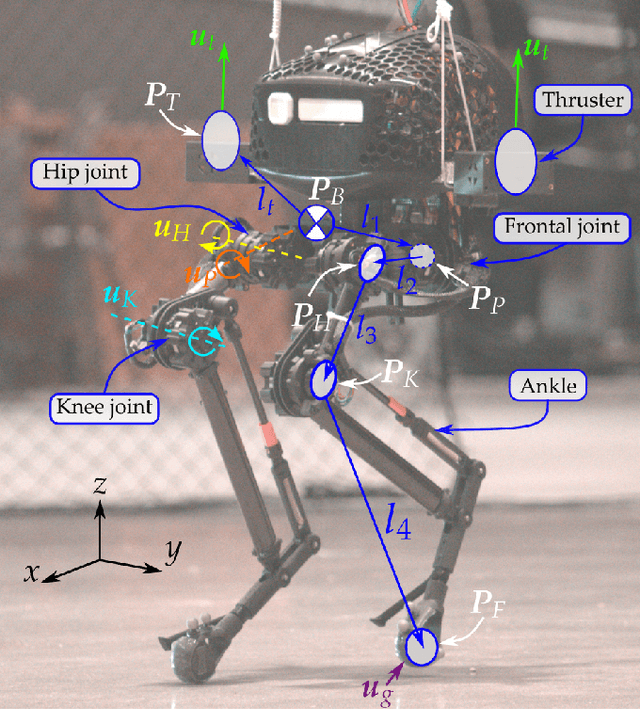
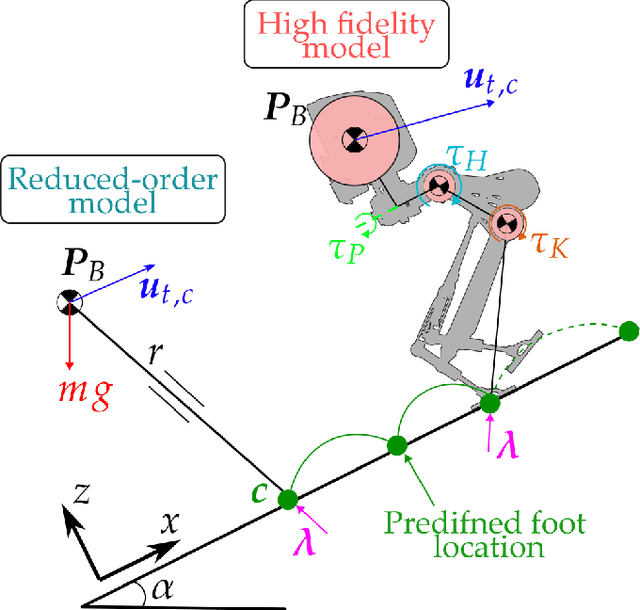
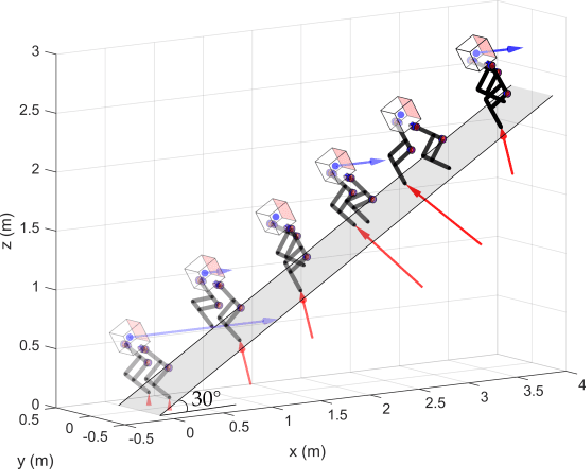
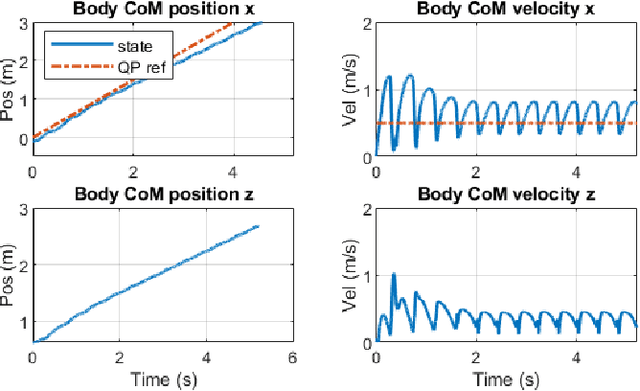
Our work aims to make significant strides in understanding unexplored locomotion control paradigms based on the integration of posture manipulation and thrust vectoring. These techniques are commonly seen in nature, such as Chukar birds using their wings to run on a nearly vertical wall. In this work, we show quadratic programming with contact constraints which is then given to the whole body controller to map on robot states to produce a thruster-assisted slope walking controller for our state-of-the-art Harpy platform. Harpy is a bipedal robot capable of legged-aerial locomotion using its legs and thrusters attached to its main frame. The optimization-based walking controller has been used for dynamic locomotion such as slope walking, but the addition of thrusters to perform inclined slope walking has not been extensively explored. In this work, we derive a thruster-assisted bipedal walking with the quadratic programming (QP) controller and implement it in simulation to study its performance.
Capture Point Control in Thruster-Assisted Bipedal Locomotion
Jun 21, 2024



Despite major advancements in control design that are robust to unplanned disturbances, bipedal robots are still susceptible to falling over and struggle to negotiate rough terrains. By utilizing thrusters in our bipedal robot, we can perform additional posture manipulation and expand the modes of locomotion to enhance the robot's stability and ability to negotiate rough and difficult-to-navigate terrains. In this paper, we present our efforts in designing a controller based on capture point control for our thruster-assisted walking model named Harpy and explore its control design possibilities. While capture point control based on centroidal models for bipedal systems has been extensively studied, the incorporation of external forces that can influence the dynamics of linear inverted pendulum models, often used in capture point-based works, has not been explored before. The inclusion of these external forces can lead to interesting interpretations of locomotion, such as virtual buoyancy studied in aquatic-legged locomotion. This paper outlines the dynamical model of our robot, the capture point method we use to assist the upper body stabilization, and the simulation work done to show the controller's feasibility.
Thruster-Assisted Incline Walking
Jun 19, 2024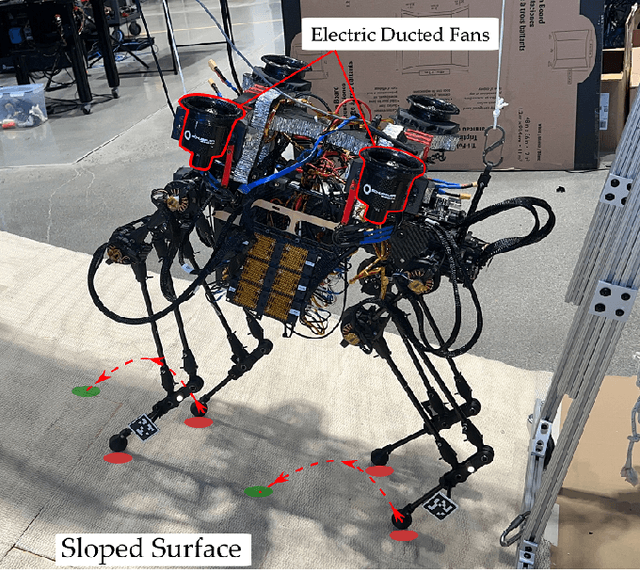

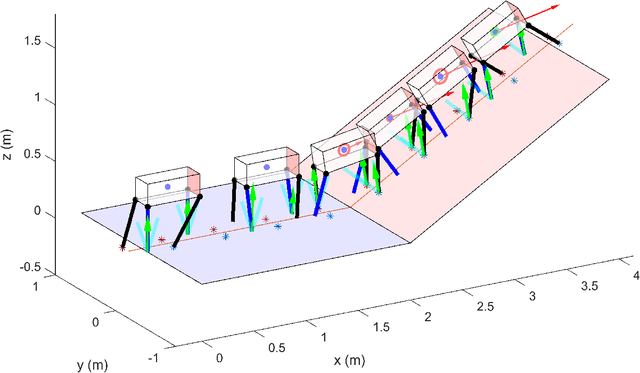

In this study, our aim is to evaluate the effectiveness of thruster-assisted steep slope walking for the Husky Carbon, a quadrupedal robot equipped with custom-designed actuators and plural electric ducted fans, through simulation prior to conducting experimental trials. Thruster-assisted steep slope walking draws inspiration from wing-assisted incline running (WAIR) observed in birds, and intriguingly incorporates posture manipulation and thrust vectoring, a locomotion technique not previously explored in the animal kingdom. Our approach involves developing a reduced-order model of the Husky robot, followed by the application of an optimization-based controller utilizing collocation methods and dynamics interpolation to determine control actions. Through simulation testing, we demonstrate the feasibility of hardware implementation of our controller.
Narrow-Path, Dynamic Walking Using Integrated Posture Manipulation and Thrust Vectoring
May 09, 2024This research concentrates on enhancing the navigational capabilities of Northeastern Universitys Husky, a multi-modal quadrupedal robot, that can integrate posture manipulation and thrust vectoring, to traverse through narrow pathways such as walking over pipes and slacklining. The Husky is outfitted with thrusters designed to stabilize its body during dynamic walking over these narrow paths. The project involves modeling the robot using the HROM (Husky Reduced Order Model) and developing an optimal control framework. This framework is based on polynomial approximation of the HROM and a collocation approach to derive optimal thruster commands necessary for achieving dynamic walking on narrow paths. The effectiveness of the modeling and control design approach is validated through simulations conducted using Matlab.