 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Letter on Progress Made on Husky Carbon: A Legged-Aerial, Multi-modal Platform
Jul 25, 2022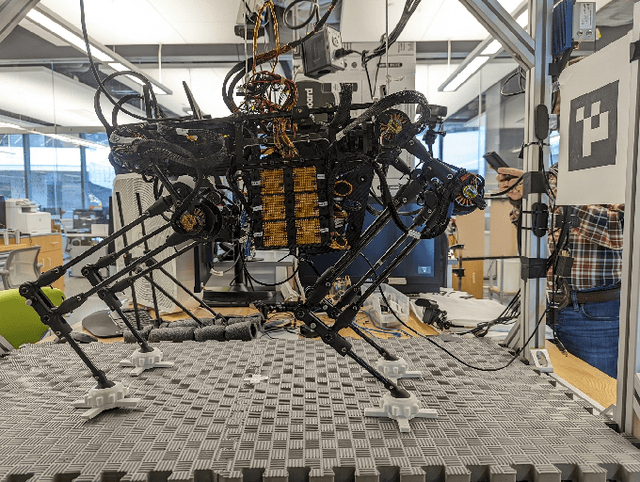
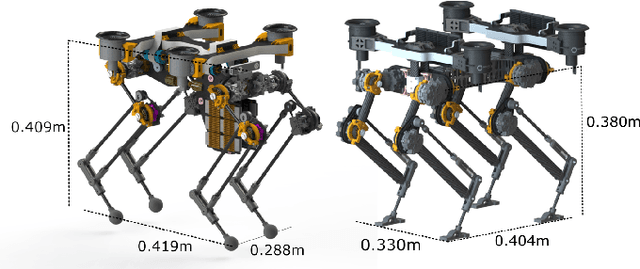
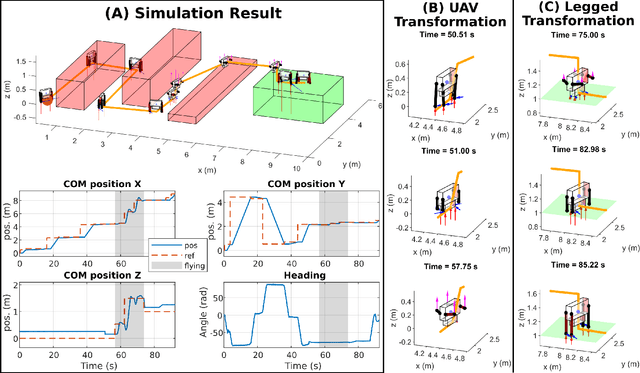
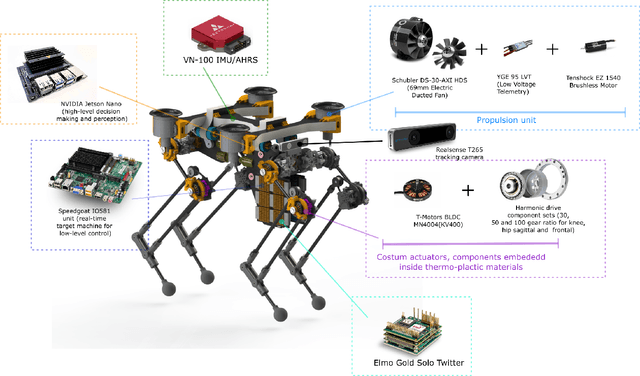
Animals, such as birds, widely use multi-modal locomotion by combining legged and aerial mobility with dominant inertial effects. The robotic biomimicry of this multi-modal locomotion feat can yield ultra-flexible systems in terms of their ability to negotiate their task spaces. The main objective of this paper is to discuss the challenges in achieving multi-modal locomotion, and to report our progress in developing our quadrupedal robot capable of multi-modal locomotion (legged and aerial locomotion), the Husky Carbon. We report the mechanical and electrical components utilized in our robot, in addition to the simulation and experimentation done to achieve our goal in developing a versatile multi-modal robotic platform.
Marine vessel tracking using a monocular camera
Aug 23, 2021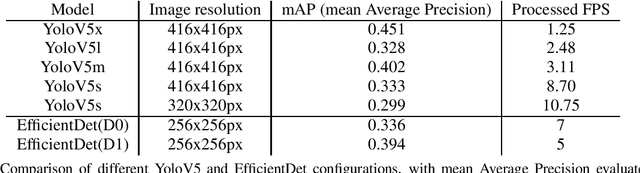
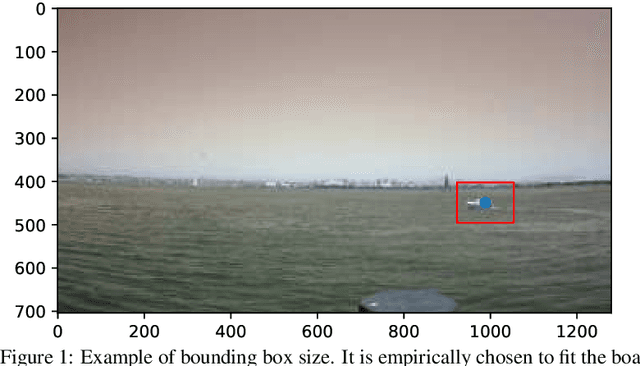


In this paper, a new technique for camera calibration using only GPS data is presented. A new way of tracking objects that move on a plane in a video is achieved by using the location and size of the bounding box to estimate the distance, achieving an average prediction error of 5.55m per 100m distance from the camera. This solution can be run in real-time at the edge, achieving efficient inference in a low-powered IoT environment while also being able to track multiple different vessels.