Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarine vessel tracking using a monocular camera
Aug 23, 2021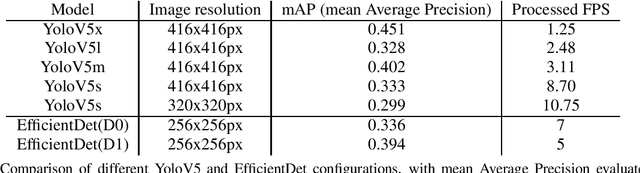
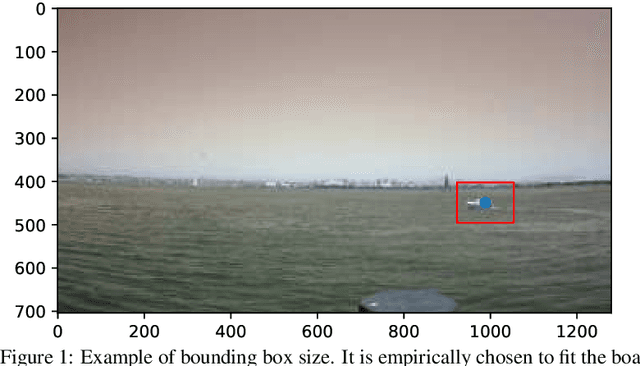


In this paper, a new technique for camera calibration using only GPS data is presented. A new way of tracking objects that move on a plane in a video is achieved by using the location and size of the bounding box to estimate the distance, achieving an average prediction error of 5.55m per 100m distance from the camera. This solution can be run in real-time at the edge, achieving efficient inference in a low-powered IoT environment while also being able to track multiple different vessels.
* 12 pages, 9 figures, the paper is based on the submission for the AI
Tracks at Sea challenge made by the same team taking to a 3rd place in the
competition, included in DeLTA 2021 conference proceedings, published on
SCITEPRESS Digital Library and available at
https://www.scitepress.org/PublicationsDetail.aspx?ID=yzZS+b/VkZ4=&t=1
Via