 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarkovType: A Markov Decision Process Strategy for Non-Invasive Brain-Computer Interfaces Typing Systems
Dec 20, 2024Brain-Computer Interfaces (BCIs) help people with severe speech and motor disabilities communicate and interact with their environment using neural activity. This work focuses on the Rapid Serial Visual Presentation (RSVP) paradigm of BCIs using noninvasive electroencephalography (EEG). The RSVP typing task is a recursive task with multiple sequences, where users see only a subset of symbols in each sequence. Extensive research has been conducted to improve classification in the RSVP typing task, achieving fast classification. However, these methods struggle to achieve high accuracy and do not consider the typing mechanism in the learning procedure. They apply binary target and non-target classification without including recursive training. To improve performance in the classification of symbols while controlling the classification speed, we incorporate the typing setup into training by proposing a Partially Observable Markov Decision Process (POMDP) approach. To the best of our knowledge, this is the first work to formulate the RSVP typing task as a POMDP for recursive classification. Experiments show that the proposed approach, MarkovType, results in a more accurate typing system compared to competitors. Additionally, our experiments demonstrate that while there is a trade-off between accuracy and speed, MarkovType achieves the optimal balance between these factors compared to other methods.
Stabilizing Subject Transfer in EEG Classification with Divergence Estimation
Oct 12, 2023Classification models for electroencephalogram (EEG) data show a large decrease in performance when evaluated on unseen test sub jects. We reduce this performance decrease using new regularization techniques during model training. We propose several graphical models to describe an EEG classification task. From each model, we identify statistical relationships that should hold true in an idealized training scenario (with infinite data and a globally-optimal model) but that may not hold in practice. We design regularization penalties to enforce these relationships in two stages. First, we identify suitable proxy quantities (divergences such as Mutual Information and Wasserstein-1) that can be used to measure statistical independence and dependence relationships. Second, we provide algorithms to efficiently estimate these quantities during training using secondary neural network models. We conduct extensive computational experiments using a large benchmark EEG dataset, comparing our proposed techniques with a baseline method that uses an adversarial classifier. We find our proposed methods significantly increase balanced accuracy on test subjects and decrease overfitting. The proposed methods exhibit a larger benefit over a greater range of hyperparameters than the baseline method, with only a small computational cost at training time. These benefits are largest when used for a fixed training period, though there is still a significant benefit for a subset of hyperparameters when our techniques are used in conjunction with early stopping regularization.
User Training with Error Augmentation for Electromyogram-based Gesture Classification
Sep 13, 2023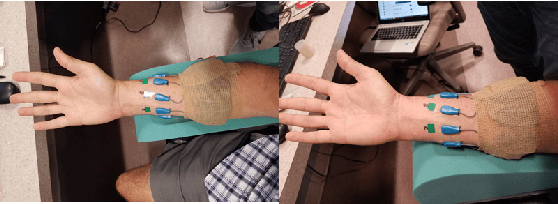
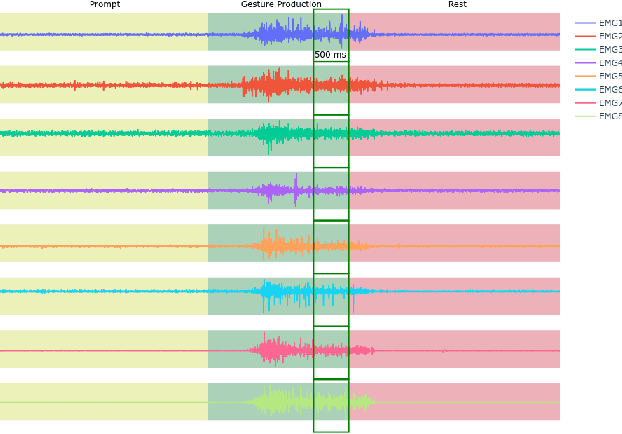
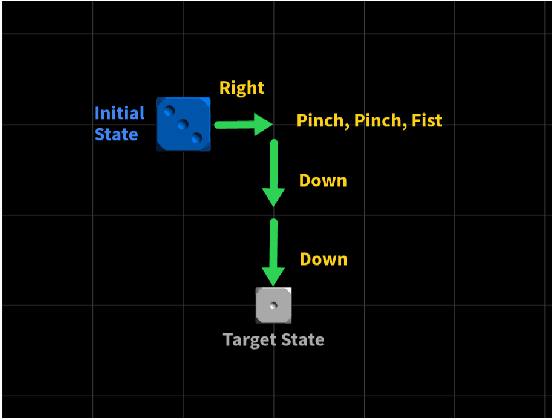
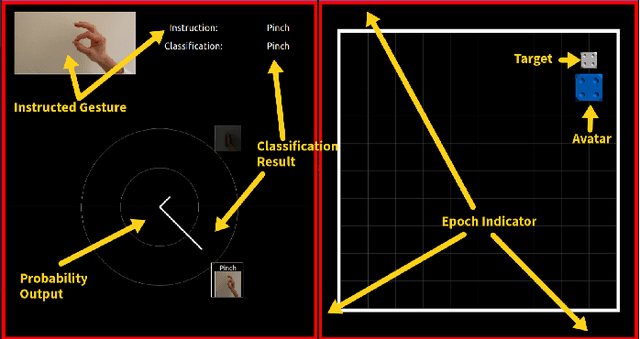
We designed and tested a system for real-time control of a user interface by extracting surface electromyographic (sEMG) activity from eight electrodes in a wrist-band configuration. sEMG data were streamed into a machine-learning algorithm that classified hand gestures in real-time. After an initial model calibration, participants were presented with one of three types of feedback during a human-learning stage: veridical feedback, in which predicted probabilities from the gesture classification algorithm were displayed without alteration, modified feedback, in which we applied a hidden augmentation of error to these probabilities, and no feedback. User performance was then evaluated in a series of minigames, in which subjects were required to use eight gestures to manipulate their game avatar to complete a task. Experimental results indicated that, relative to baseline, the modified feedback condition led to significantly improved accuracy and improved gesture class separation. These findings suggest that real-time feedback in a gamified user interface with manipulation of feedback may enable intuitive, rapid, and accurate task acquisition for sEMG-based gesture recognition applications.
A Multi-label Classification Approach to Increase Expressivity of EMG-based Gesture Recognition
Sep 13, 2023Objective: The objective of the study is to efficiently increase the expressivity of surface electromyography-based (sEMG) gesture recognition systems. Approach: We use a problem transformation approach, in which actions were subset into two biomechanically independent components - a set of wrist directions and a set of finger modifiers. To maintain fast calibration time, we train models for each component using only individual gestures, and extrapolate to the full product space of combination gestures by generating synthetic data. We collected a supervised dataset with high-confidence ground truth labels in which subjects performed combination gestures while holding a joystick, and conducted experiments to analyze the impact of model architectures, classifier algorithms, and synthetic data generation strategies on the performance of the proposed approach. Main Results: We found that a problem transformation approach using a parallel model architecture in combination with a non-linear classifier, along with restricted synthetic data generation, shows promise in increasing the expressivity of sEMG-based gestures with a short calibration time. Significance: sEMG-based gesture recognition has applications in human-computer interaction, virtual reality, and the control of robotic and prosthetic devices. Existing approaches require exhaustive model calibration. The proposed approach increases expressivity without requiring users to demonstrate all combination gesture classes. Our results may be extended to larger gesture vocabularies and more complicated model architectures.
Efficient Modeling of Morphing Wing Flight Using Neural Networks and Cubature Rules
Oct 03, 2021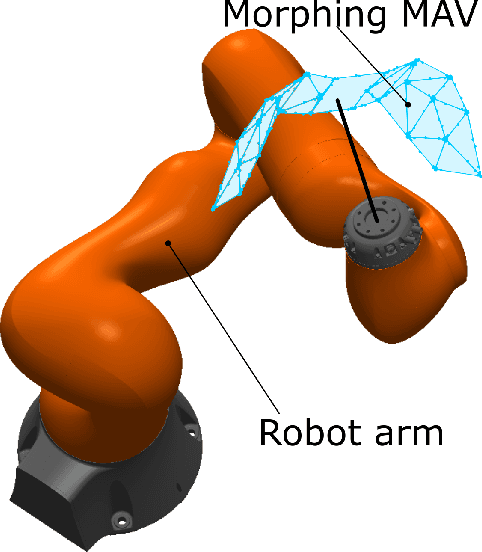
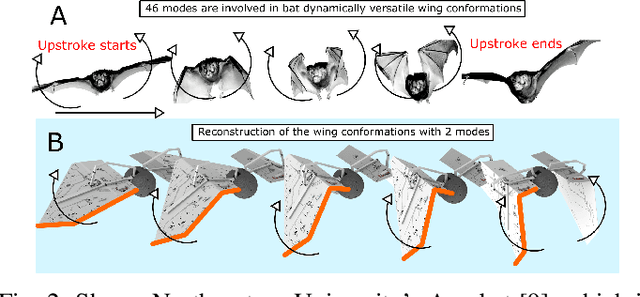
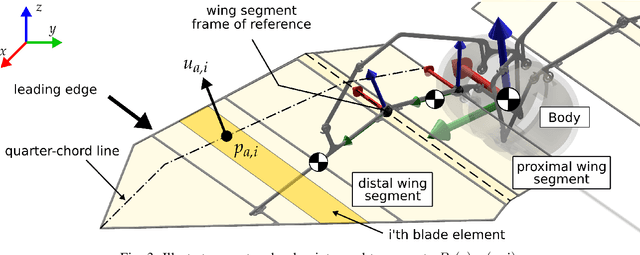
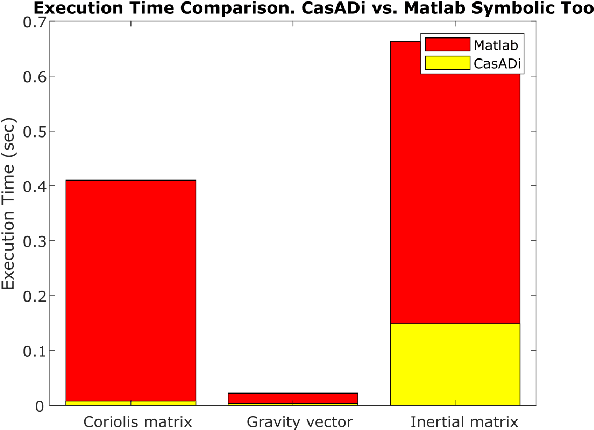
Fluidic locomotion of flapping Micro Aerial Vehicles (MAVs) can be very complex, particularly when the rules from insect flight dynamics (fast flapping dynamics and light wings) are not applicable. In these situations, widely used averaging techniques can fail quickly. The primary motivation is to find efficient models for complex forms of aerial locomotion where wings constitute a large part of body mass (i.e., dominant inertial effects) and deform in multiple directions (i.e., morphing wing). In these systems, high degrees of freedom yields complex inertial, Coriolis, and gravity terms. We use Algorithmic Differentiation (AD) and Bayesian filters computed with cubature rules conjointly to quickly estimate complex fluid-structure interactions. In general, Bayesian filters involve finding complex numerical integration (e.g., find posterior integrals). Using cubature rules to compute Gaussian-weighted integrals and AD, we show that the complex multi-degrees-of-freedom dynamics of morphing MAVs can be computed very efficiently and accurately. Therefore, our work facilitates closed-loop feedback control of these morphing MAVs.
Sample Efficient Interactive End-to-End Deep Learning for Self-Driving Cars with Selective Multi-Class Safe Dataset Aggregation
Jul 29, 2020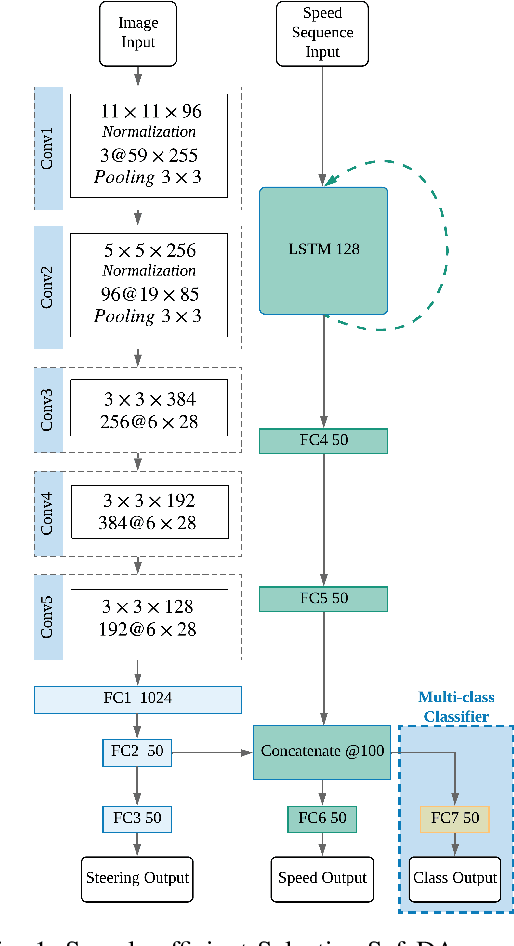
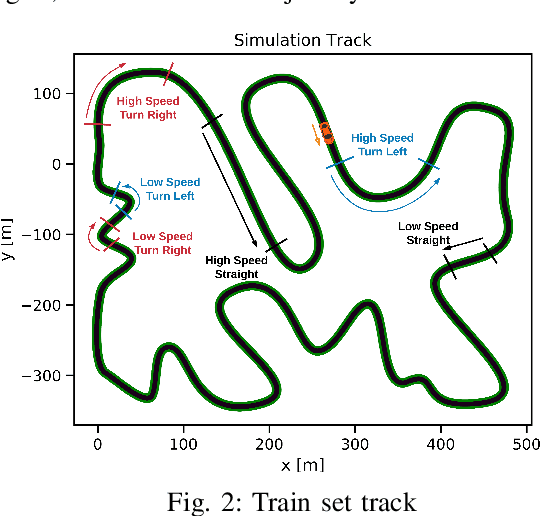
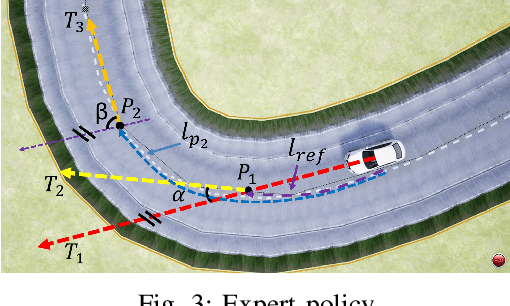
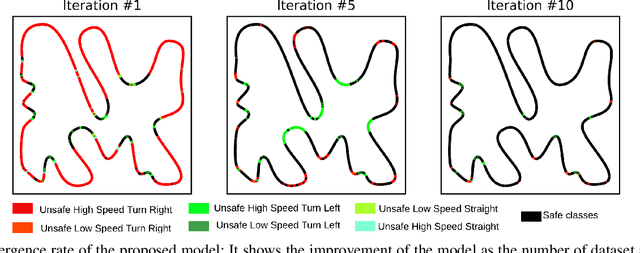
The objective of this paper is to develop a sample efficient end-to-end deep learning method for self-driving cars, where we attempt to increase the value of the information extracted from samples, through careful analysis obtained from each call to expert driver\'s policy. End-to-end imitation learning is a popular method for computing self-driving car policies. The standard approach relies on collecting pairs of inputs (camera images) and outputs (steering angle, etc.) from an expert policy and fitting a deep neural network to this data to learn the driving policy. Although this approach had some successful demonstrations in the past, learning a good policy might require a lot of samples from the expert driver, which might be resource-consuming. In this work, we develop a novel framework based on the Safe Dateset Aggregation (safe DAgger) approach, where the current learned policy is automatically segmented into different trajectory classes, and the algorithm identifies trajectory segments or classes with the weak performance at each step. Once the trajectory segments with weak performance identified, the sampling algorithm focuses on calling the expert policy only on these segments, which improves the convergence rate. The presented simulation results show that the proposed approach can yield significantly better performance compared to the standard Safe DAgger algorithm while using the same amount of samples from the expert.
* 6 pages, 6 figures, IROS2019 conference
Automated Lane Change Decision Making using Deep Reinforcement Learning in Dynamic and Uncertain Highway Environment
Sep 18, 2019
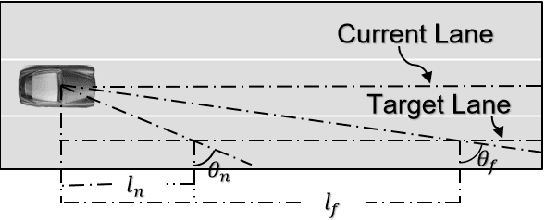

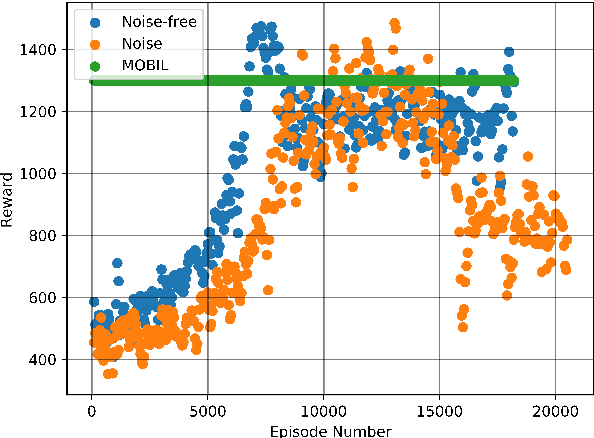
Autonomous lane changing is a critical feature for advanced autonomous driving systems, that involves several challenges such as uncertainty in other driver's behaviors and the trade-off between safety and agility. In this work, we develop a novel simulation environment that emulates these challenges and train a deep reinforcement learning agent that yields consistent performance in a variety of dynamic and uncertain traffic scenarios. Results show that the proposed data-driven approach performs significantly better in noisy environments compared to methods that rely solely on heuristics.