 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of A Stochastic Traffic Environment with Generative Time-Series Models for Improving Generalization Capabilities of Autonomous Driving Agents
Jun 10, 2020
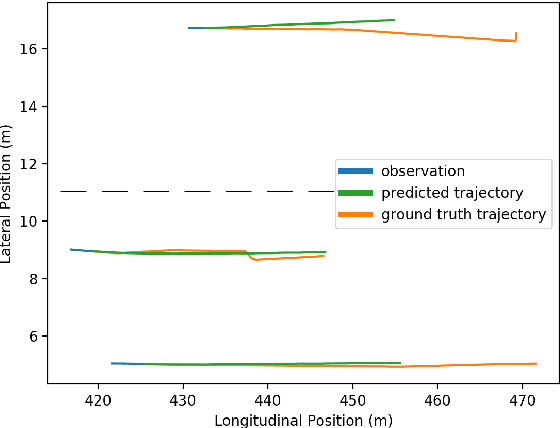
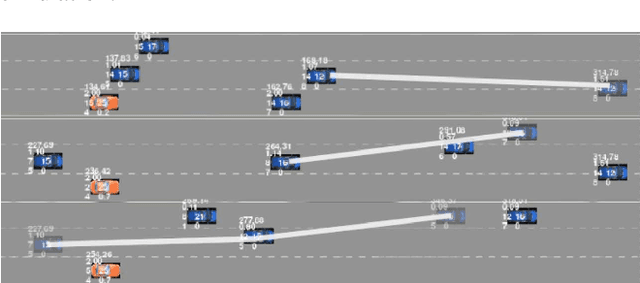
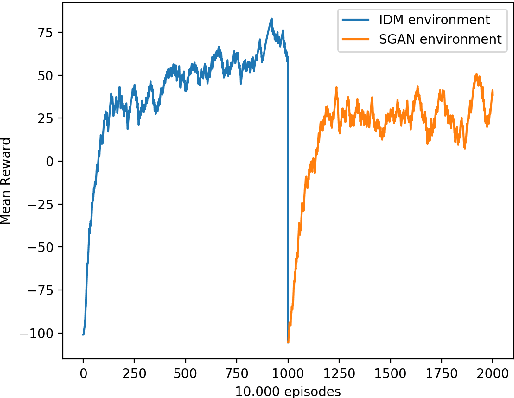
Automated lane changing is a critical feature for advanced autonomous driving systems. In recent years, reinforcement learning (RL) algorithms trained on traffic simulators yielded successful results in computing lane changing policies that strike a balance between safety, agility and compensating for traffic uncertainty. However, many RL algorithms exhibit simulator bias and policies trained on simple simulators do not generalize well to realistic traffic scenarios. In this work, we develop a data driven traffic simulator by training a generative adverserial network (GAN) on real life trajectory data. The simulator generates randomized trajectories that resembles real life traffic interactions between vehicles, which enables training the RL agent on much richer and realistic scenarios. We demonstrate through simulations that RL agents that are trained on GAN-based traffic simulator has stronger generalization capabilities compared to RL agents trained on simple rule-driven simulators.
Automated Lane Change Decision Making using Deep Reinforcement Learning in Dynamic and Uncertain Highway Environment
Sep 18, 2019
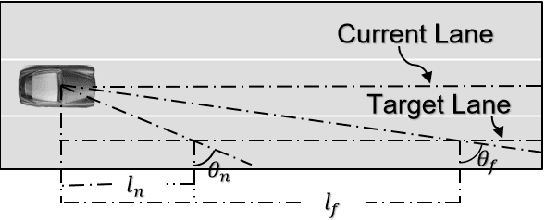

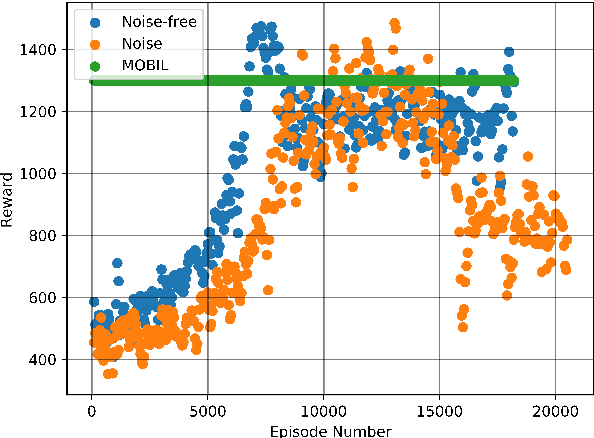
Autonomous lane changing is a critical feature for advanced autonomous driving systems, that involves several challenges such as uncertainty in other driver's behaviors and the trade-off between safety and agility. In this work, we develop a novel simulation environment that emulates these challenges and train a deep reinforcement learning agent that yields consistent performance in a variety of dynamic and uncertain traffic scenarios. Results show that the proposed data-driven approach performs significantly better in noisy environments compared to methods that rely solely on heuristics.