 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Traditional DoE: Deep Reinforcement Learning for Optimizing Experiments in Model Identification of Battery Dynamics
Oct 12, 2023Model identification of battery dynamics is a central problem in energy research; many energy management systems and design processes rely on accurate battery models for efficiency optimization. The standard methodology for battery modelling is traditional design of experiments (DoE), where the battery dynamics are excited with many different current profiles and the measured outputs are used to estimate the system dynamics. However, although it is possible to obtain useful models with the traditional approach, the process is time consuming and expensive because of the need to sweep many different current-profile configurations. In the present work, a novel DoE approach is developed based on deep reinforcement learning, which alters the configuration of the experiments on the fly based on the statistics of past experiments. Instead of sticking to a library of predefined current profiles, the proposed approach modifies the current profiles dynamically by updating the output space covered by past measurements, hence only the current profiles that are informative for future experiments are applied. Simulations and real experiments are used to show that the proposed approach gives models that are as accurate as those obtained with traditional DoE but by using 85\% less resources.
Automated Lane Change Decision Making using Deep Reinforcement Learning in Dynamic and Uncertain Highway Environment
Sep 18, 2019
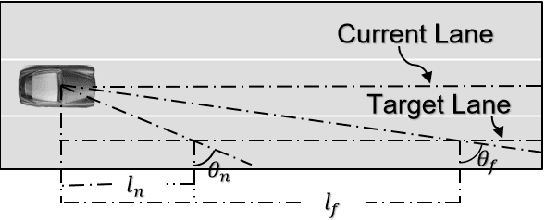

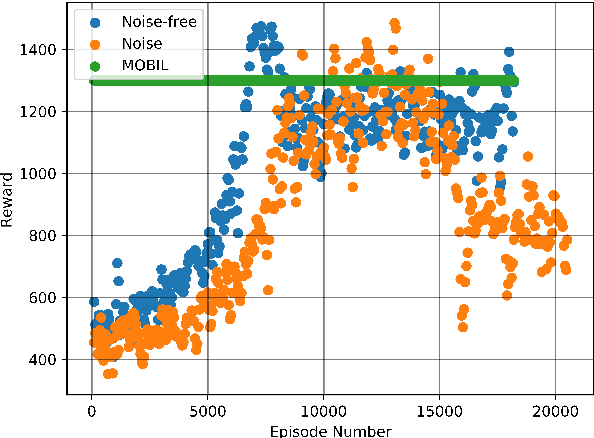
Autonomous lane changing is a critical feature for advanced autonomous driving systems, that involves several challenges such as uncertainty in other driver's behaviors and the trade-off between safety and agility. In this work, we develop a novel simulation environment that emulates these challenges and train a deep reinforcement learning agent that yields consistent performance in a variety of dynamic and uncertain traffic scenarios. Results show that the proposed data-driven approach performs significantly better in noisy environments compared to methods that rely solely on heuristics.