Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Lane Change Decision Making using Deep Reinforcement Learning in Dynamic and Uncertain Highway Environment
Paper and Code
Sep 18, 2019
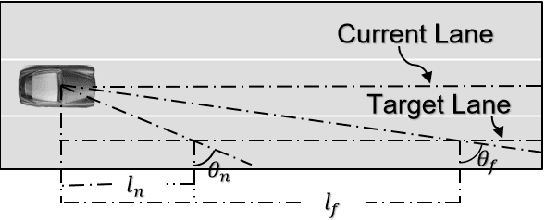

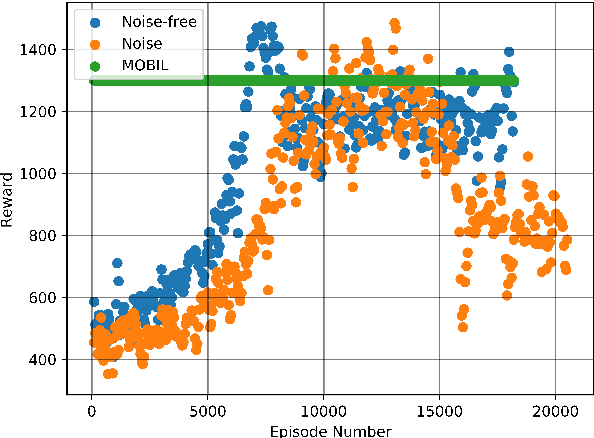
Autonomous lane changing is a critical feature for advanced autonomous driving systems, that involves several challenges such as uncertainty in other driver's behaviors and the trade-off between safety and agility. In this work, we develop a novel simulation environment that emulates these challenges and train a deep reinforcement learning agent that yields consistent performance in a variety of dynamic and uncertain traffic scenarios. Results show that the proposed data-driven approach performs significantly better in noisy environments compared to methods that rely solely on heuristics.
* Accepted to IEEE Intelligent Transportation Systems Conference - ITSC
2019
View paper on