 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSSplain: Sparse and Smooth Explainer for Retinopathy of Prematurity Classification
Dec 08, 2025Neural networks are frequently used in medical diagnosis. However, due to their black-box nature, model explainers are used to help clinicians understand better and trust model outputs. This paper introduces an explainer method for classifying Retinopathy of Prematurity (ROP) from fundus images. Previous methods fail to generate explanations that preserve input image structures such as smoothness and sparsity. We introduce Sparse and Smooth Explainer (SSplain), a method that generates pixel-wise explanations while preserving image structures by enforcing smoothness and sparsity. This results in realistic explanations to enhance the understanding of the given black-box model. To achieve this goal, we define an optimization problem with combinatorial constraints and solve it using the Alternating Direction Method of Multipliers (ADMM). Experimental results show that SSplain outperforms commonly used explainers in terms of both post-hoc accuracy and smoothness analyses. Additionally, SSplain identifies features that are consistent with domain-understandable features that clinicians consider as discriminative factors for ROP. We also show SSplain's generalization by applying it to additional publicly available datasets. Code is available at https://github.com/neu-spiral/SSplain.
MarkovType: A Markov Decision Process Strategy for Non-Invasive Brain-Computer Interfaces Typing Systems
Dec 20, 2024Brain-Computer Interfaces (BCIs) help people with severe speech and motor disabilities communicate and interact with their environment using neural activity. This work focuses on the Rapid Serial Visual Presentation (RSVP) paradigm of BCIs using noninvasive electroencephalography (EEG). The RSVP typing task is a recursive task with multiple sequences, where users see only a subset of symbols in each sequence. Extensive research has been conducted to improve classification in the RSVP typing task, achieving fast classification. However, these methods struggle to achieve high accuracy and do not consider the typing mechanism in the learning procedure. They apply binary target and non-target classification without including recursive training. To improve performance in the classification of symbols while controlling the classification speed, we incorporate the typing setup into training by proposing a Partially Observable Markov Decision Process (POMDP) approach. To the best of our knowledge, this is the first work to formulate the RSVP typing task as a POMDP for recursive classification. Experiments show that the proposed approach, MarkovType, results in a more accurate typing system compared to competitors. Additionally, our experiments demonstrate that while there is a trade-off between accuracy and speed, MarkovType achieves the optimal balance between these factors compared to other methods.
Tubular Curvature Filter: Implicit Pointwise Curvature Calculation Method for Tubular Objects
Nov 20, 2023



Curvature estimation methods are important as they capture salient features for various applications in image processing, especially within medical domains where tortuosity of vascular structures is of significant interest. Existing methods based on centerline or skeleton curvature fail to capture curvature gradients across a rotating tubular structure. This paper presents a Tubular Curvature Filter method that locally calculates the acceleration of bundles of curves that traverse along the tubular object parallel to the centerline. This is achieved by examining the directional rate of change in the eigenvectors of the Hessian matrix of a tubular intensity function in space. This method implicitly calculates the local tubular curvature without the need to explicitly segment the tubular object. Experimental results demonstrate that the Tubular Curvature Filter method provides accurate estimates of local curvature at any point inside tubular structures.
User Training with Error Augmentation for Electromyogram-based Gesture Classification
Sep 13, 2023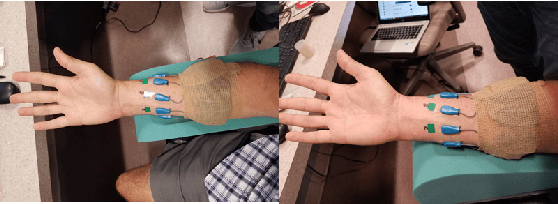
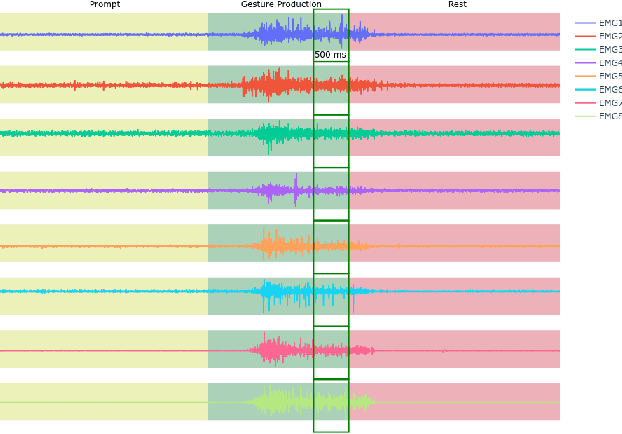
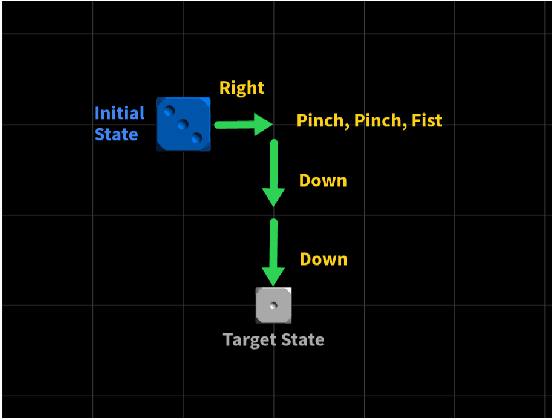
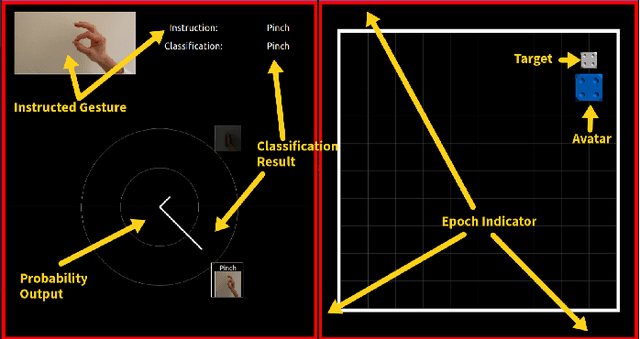
We designed and tested a system for real-time control of a user interface by extracting surface electromyographic (sEMG) activity from eight electrodes in a wrist-band configuration. sEMG data were streamed into a machine-learning algorithm that classified hand gestures in real-time. After an initial model calibration, participants were presented with one of three types of feedback during a human-learning stage: veridical feedback, in which predicted probabilities from the gesture classification algorithm were displayed without alteration, modified feedback, in which we applied a hidden augmentation of error to these probabilities, and no feedback. User performance was then evaluated in a series of minigames, in which subjects were required to use eight gestures to manipulate their game avatar to complete a task. Experimental results indicated that, relative to baseline, the modified feedback condition led to significantly improved accuracy and improved gesture class separation. These findings suggest that real-time feedback in a gamified user interface with manipulation of feedback may enable intuitive, rapid, and accurate task acquisition for sEMG-based gesture recognition applications.
A Multi-label Classification Approach to Increase Expressivity of EMG-based Gesture Recognition
Sep 13, 2023Objective: The objective of the study is to efficiently increase the expressivity of surface electromyography-based (sEMG) gesture recognition systems. Approach: We use a problem transformation approach, in which actions were subset into two biomechanically independent components - a set of wrist directions and a set of finger modifiers. To maintain fast calibration time, we train models for each component using only individual gestures, and extrapolate to the full product space of combination gestures by generating synthetic data. We collected a supervised dataset with high-confidence ground truth labels in which subjects performed combination gestures while holding a joystick, and conducted experiments to analyze the impact of model architectures, classifier algorithms, and synthetic data generation strategies on the performance of the proposed approach. Main Results: We found that a problem transformation approach using a parallel model architecture in combination with a non-linear classifier, along with restricted synthetic data generation, shows promise in increasing the expressivity of sEMG-based gestures with a short calibration time. Significance: sEMG-based gesture recognition has applications in human-computer interaction, virtual reality, and the control of robotic and prosthetic devices. Existing approaches require exhaustive model calibration. The proposed approach increases expressivity without requiring users to demonstrate all combination gesture classes. Our results may be extended to larger gesture vocabularies and more complicated model architectures.