 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementing Robust M-Estimators with Certifiable Factor Graph Optimization
Mar 21, 2026Parameter estimation in robotics and computer vision faces formidable challenges from both outlier contamination and nonconvex optimization landscapes. While M-estimation addresses the problem of outliers through robust loss functions, it creates severely nonconvex problems that are difficult to solve globally. Adaptive reweighting schemes provide one particularly appealing strategy for implementing M-estimation in practice: these methods solve a sequence of simpler weighted least squares (WLS) subproblems, enabling both the use of standard least squares solvers and the recovery of higher-quality estimates than simple local search. However, adaptive reweighting still crucially relies upon solving the inner WLS problems effectively, a task that remains challenging in many robotics applications due to the intrinsic nonconvexity of many common parameter spaces (e.g. rotations and poses). In this paper, we show how one can easily implement adaptively reweighted M-estimators with certifiably correct solvers for the inner WLS subproblems using only fast local optimization over smooth manifolds. Our approach exploits recent work on certifiable factor graph optimization to provide global optimality certificates for the inner WLS subproblems while seamlessly integrating into existing factor graph-based software libraries and workflows. Experimental evaluation on pose-graph optimization and landmark SLAM tasks demonstrates that our adaptively reweighted certifiable estimation approach provides higher-quality estimates than alternative local search-based methods, while scaling tractably to realistic problem sizes.
Label Hijacking in Track Consensus-Based Distributed Multi-Target Tracking
Mar 05, 2026Distributed multi-target tracking (DMTT) in limited field-of-view (FoV) sensor networks commonly suffers from label inconsistency, whereby different nodes disagree on the identity of the same target. Recent track-consensus DMTT (TC-DMTT) strategies mitigate this issue by enforcing kinematic and label agreement through metric-based track matching. Nevertheless, their behavior under adversarial conditions remains largely unexplored. In this paper, we reveal identity-level vulnerabilities in TC-DMTT and introduce the concept of label hijacking: an attack in which an adversary injects spoofed tracks to corrupt target identities across the network. Drawing on an analogy to classical pull-off deception in radar, we formalize a notion of attack stealthiness and derive an optimization-based strategy for crafting such attacks. A three-sensor network case study demonstrates the impact of the proposed attack on label consistency and tracking accuracy, showing successful target impersonation. Overall, this work highlights the need to rethink robustness at the consensus layer in DMTT frameworks.
Cooperative Differential GNSS Positioning: Estimators and Bounds
Jan 09, 2026In Differential GNSS (DGNSS) positioning, differencing measurements between a user and a reference station suppresses common-mode errors but also introduces reference-station noise, which fundamentally limits accuracy. This limitation is minor for high-grade stations but becomes significant when using reference infrastructure of mixed quality. This paper investigates how large-scale user cooperation can mitigate the impact of reference-station noise in conventional (non-cooperative) DGNSS systems. We develop a unified estimation framework for cooperative DGNSS (C-DGNSS) and cooperative real-time kinematic (C-RTK) positioning, and derive parameterized expressions for their Fisher information matrices as functions of network size, satellite geometry, and reference-station noise. This formulation enables theoretical analysis of estimation performance, identifying regimes where cooperation asymptotically restores the accuracy of DGNSS with an ideal (noise-free) reference. Simulations validate these theoretical findings.
Mitigation of Radar Range Deception Jamming Using Random Finite Sets
Aug 21, 2024This paper presents a radar target tracking framework for addressing main-beam range deception jamming attacks using random finite sets (RFSs). Our system handles false alarms and detections with false range information through multiple hypothesis tracking (MHT) to resolve data association uncertainties. We focus on range gate pull-off (RGPO) attacks, where the attacker adds positive delays to the radar pulse, thereby mimicking the target trajectory while appearing at a larger distance from the radar. The proposed framework incorporates knowledge about the spatial behavior of the attack into the assumed RFS clutter model and uses only position information without relying on additional signal features. We present an adaptive solution that estimates the jammer-induced biases to improve tracking accuracy as well as a simpler non-adaptive version that performs well when accurate priors on the jamming range are available. Furthermore, an expression for RGPO attack detection is derived, where the adaptive solution offers superior performance. The presented strategies provide tracking resilience against multiple RGPO attacks in terms of position estimation accuracy and jamming detection without degrading tracking performance in the absence of jamming.
On the Impact of Sampling on Deep Sequential State Estimation
Nov 28, 2023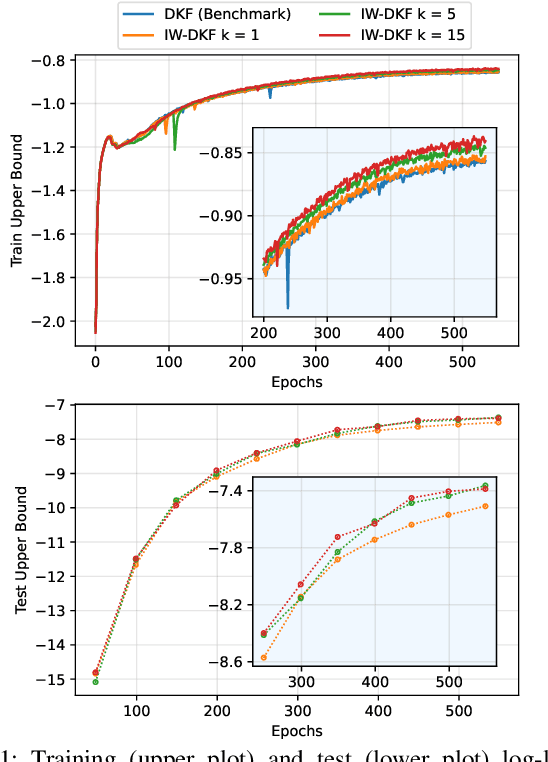
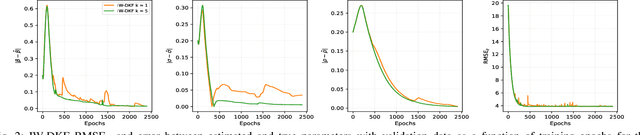
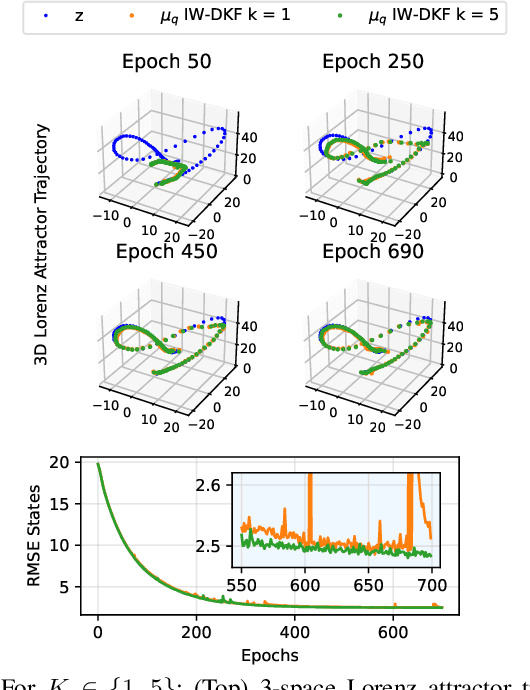
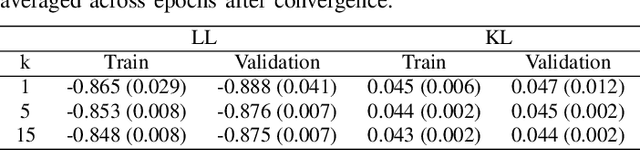
State inference and parameter learning in sequential models can be successfully performed with approximation techniques that maximize the evidence lower bound to the marginal log-likelihood of the data distribution. These methods may be referred to as Dynamical Variational Autoencoders, and our specific focus lies on the deep Kalman filter. It has been shown that the ELBO objective can oversimplify data representations, potentially compromising estimation quality. Tighter Monte Carlo objectives have been proposed in the literature to enhance generative modeling performance. For instance, the IWAE objective uses importance weights to reduce the variance of marginal log-likelihood estimates. In this paper, importance sampling is applied to the DKF framework for learning deep Markov models, resulting in the IW-DKF, which shows an improvement in terms of log-likelihood estimates and KL divergence between the variational distribution and the transition model. The framework using the sampled DKF update rule is also accommodated to address sequential state and parameter estimation when working with highly non-linear physics-based models. An experiment with the 3-space Lorenz attractor shows an enhanced generative modeling performance and also a decrease in RMSE when estimating the model parameters and latent states, indicating that tighter MCOs lead to improved state inference performance.
Jammer classification with Federated Learning
Jun 05, 2023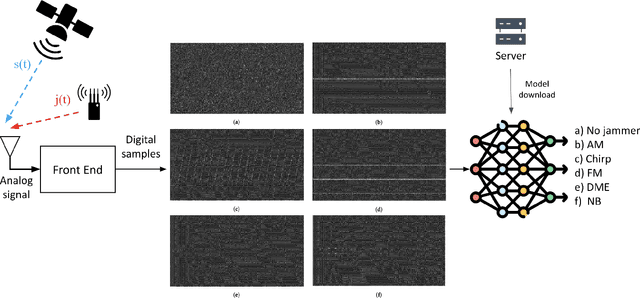
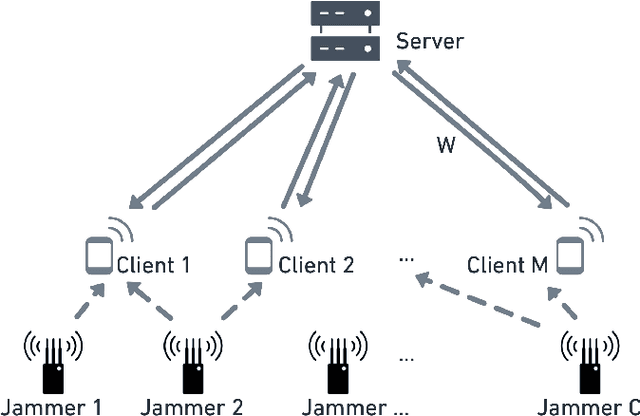
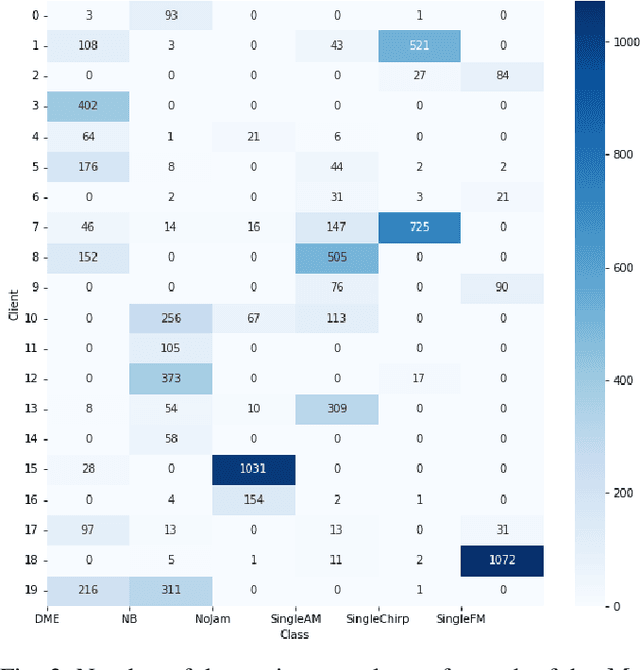
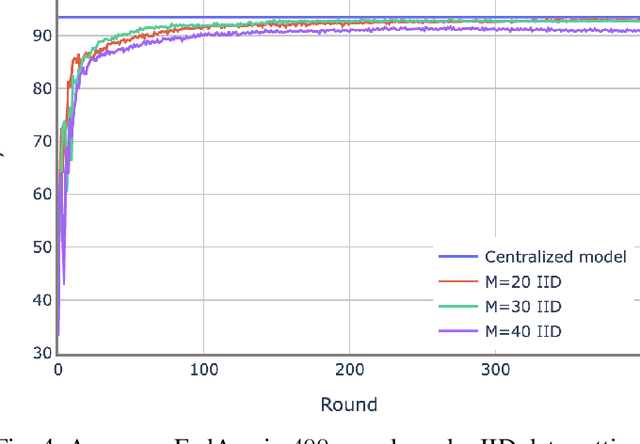
Jamming signals can jeopardize the operation of GNSS receivers until denying its operation. Given their ubiquity, jamming mitigation and localization techniques are of crucial importance, for which jammer classification is of help. Data-driven models have been proven useful in detecting these threats, while their training using crowdsourced data still poses challenges when it comes to private data sharing. This article investigates the use of federated learning to train jamming signal classifiers locally on each device, with model updates aggregated and averaged at the central server. This allows for privacy-preserving training procedures that do not require centralized data storage or access to client local data. The used framework FedAvg is assessed on a dataset consisting of spectrogram images of simulated interfered GNSS signal. Six different jammer types are effectively classified with comparable results to a fully centralized solution that requires vast amounts of data communication and involves privacy-preserving concerns.
Recursive classification of satellite imaging time-series: An application to water and land cover mapping
Jan 04, 2023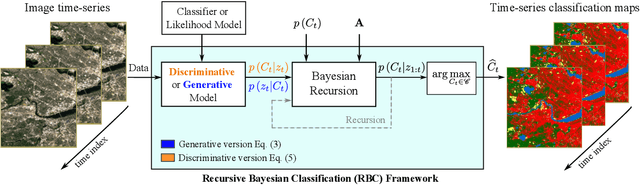
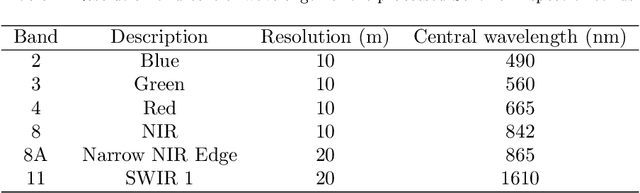
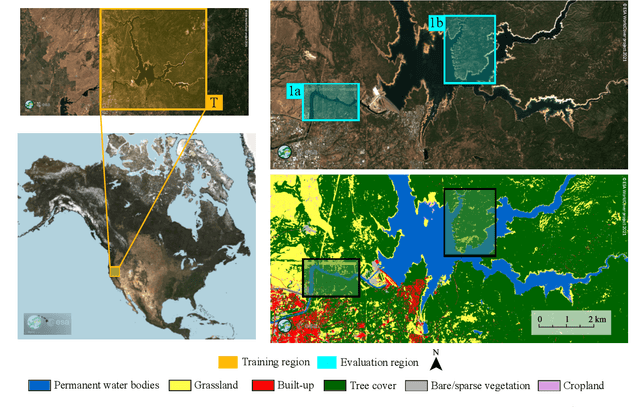
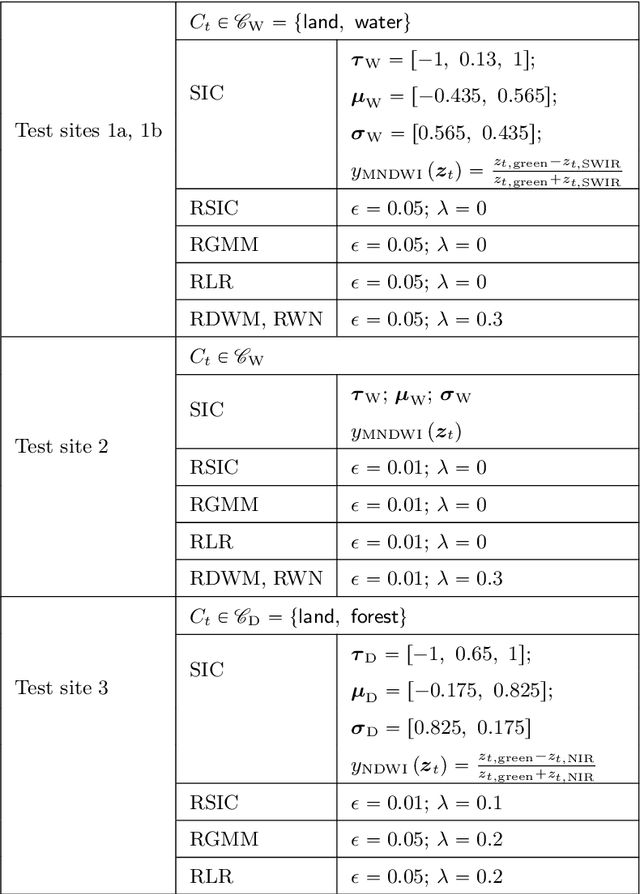
A wide variety of applications of fundamental importance for security, environmental protection and urban development need access to accurate land cover monitoring and water mapping, for which the analysis of optical remote sensing imagery is key. Classification of time-series images, particularly with recursive methods, is of increasing interest in the current literature. Nevertheless, existing recursive approaches typically require large amounts of training data. This paper introduces a recursive classification framework that provides high accuracy while requiring low computational cost and minimal supervision. The proposed approach transforms a static classifier into a recursive one using a probabilistic framework that is robust to non-informative image variations. A water mapping and a land cover experiment are conducted analyzing Sentinel-2 satellite data covering two areas in the United States. The performance of three static classification algorithms and their recursive versions is compared, including a Gaussian Mixture Model (GMM), Logistic Regression (LR) and Spectral Index Classifiers (SICs). SICs consist in a new approach that we introduce to convert the Modified Normalized Difference Water Index (MNDWI) and the Normalized Difference Vegetation Index (NDVI) into probabilistic classification results. Two state-of-the-art deep learning-based classifiers are also used as benchmark models. Results show that the proposed method significantly increases the robustness of existing static classifiers in multitemporal settings. Our method also improves the performance of deep learning-based classifiers without the need of additional training data.