 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVILTA: A VLM-in-the-Loop Adversary for Enhancing Driving Policy Robustness
Jan 19, 2026The safe deployment of autonomous driving (AD) systems is fundamentally hindered by the long-tail problem, where rare yet critical driving scenarios are severely underrepresented in real-world data. Existing solutions including safety-critical scenario generation and closed-loop learning often rely on rule-based heuristics, resampling methods and generative models learned from offline datasets, limiting their ability to produce diverse and novel challenges. While recent works leverage Vision Language Models (VLMs) to produce scene descriptions that guide a separate, downstream model in generating hazardous trajectories for agents, such two-stage framework constrains the generative potential of VLMs, as the diversity of the final trajectories is ultimately limited by the generalization ceiling of the downstream algorithm. To overcome these limitations, we introduce VILTA (VLM-In-the-Loop Trajectory Adversary), a novel framework that integrates a VLM into the closed-loop training of AD agents. Unlike prior works, VILTA actively participates in the training loop by comprehending the dynamic driving environment and strategically generating challenging scenarios through direct, fine-grained editing of surrounding agents' future trajectories. This direct-editing approach fully leverages the VLM's powerful generalization capabilities to create a diverse curriculum of plausible yet challenging scenarios that extend beyond the scope of traditional methods. We demonstrate that our approach substantially enhances the safety and robustness of the resulting AD policy, particularly in its ability to navigate critical long-tail events.
DVGT: Driving Visual Geometry Transformer
Dec 18, 2025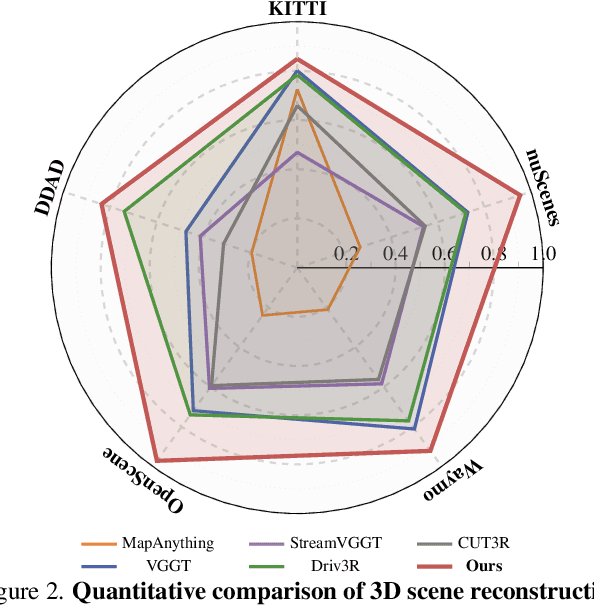
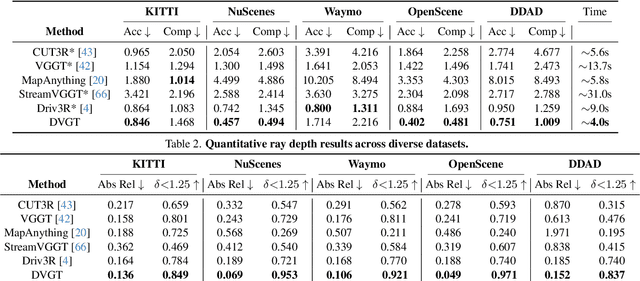
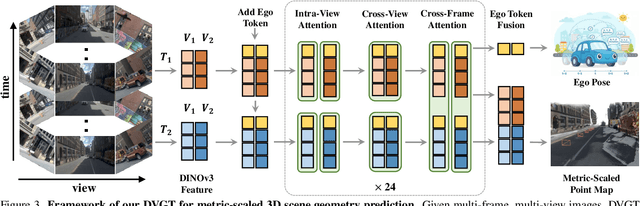
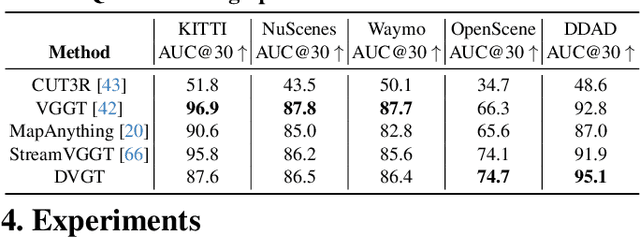
Perceiving and reconstructing 3D scene geometry from visual inputs is crucial for autonomous driving. However, there still lacks a driving-targeted dense geometry perception model that can adapt to different scenarios and camera configurations. To bridge this gap, we propose a Driving Visual Geometry Transformer (DVGT), which reconstructs a global dense 3D point map from a sequence of unposed multi-view visual inputs. We first extract visual features for each image using a DINO backbone, and employ alternating intra-view local attention, cross-view spatial attention, and cross-frame temporal attention to infer geometric relations across images. We then use multiple heads to decode a global point map in the ego coordinate of the first frame and the ego poses for each frame. Unlike conventional methods that rely on precise camera parameters, DVGT is free of explicit 3D geometric priors, enabling flexible processing of arbitrary camera configurations. DVGT directly predicts metric-scaled geometry from image sequences, eliminating the need for post-alignment with external sensors. Trained on a large mixture of driving datasets including nuScenes, OpenScene, Waymo, KITTI, and DDAD, DVGT significantly outperforms existing models on various scenarios. Code is available at https://github.com/wzzheng/DVGT.
GaussianPretrain: A Simple Unified 3D Gaussian Representation for Visual Pre-training in Autonomous Driving
Nov 19, 2024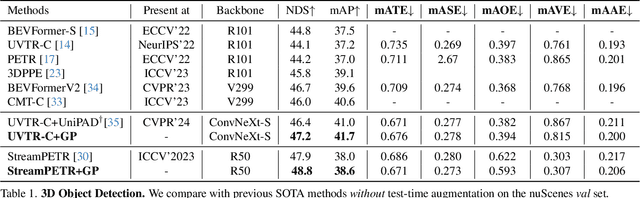
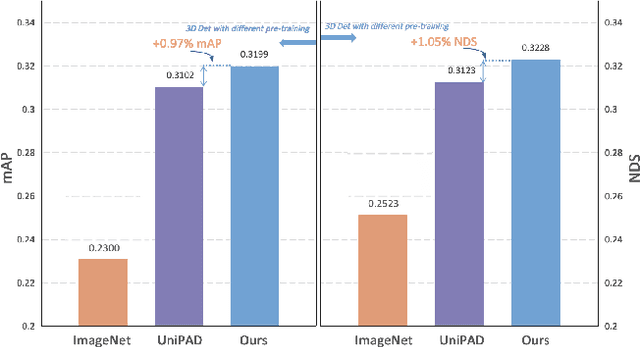
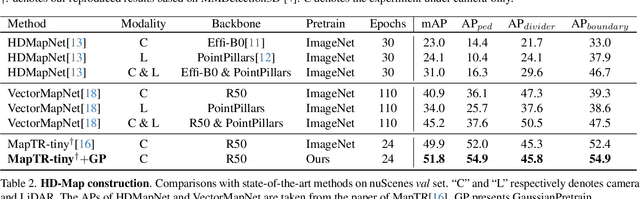
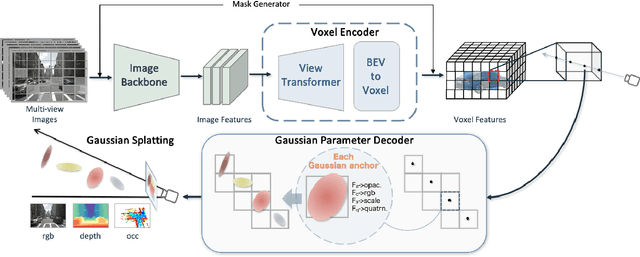
Self-supervised learning has made substantial strides in image processing, while visual pre-training for autonomous driving is still in its infancy. Existing methods often focus on learning geometric scene information while neglecting texture or treating both aspects separately, hindering comprehensive scene understanding. In this context, we are excited to introduce GaussianPretrain, a novel pre-training paradigm that achieves a holistic understanding of the scene by uniformly integrating geometric and texture representations. Conceptualizing 3D Gaussian anchors as volumetric LiDAR points, our method learns a deepened understanding of scenes to enhance pre-training performance with detailed spatial structure and texture, achieving that 40.6% faster than NeRF-based method UniPAD with 70% GPU memory only. We demonstrate the effectiveness of GaussianPretrain across multiple 3D perception tasks, showing significant performance improvements, such as a 7.05% increase in NDS for 3D object detection, boosts mAP by 1.9% in HD map construction and 0.8% improvement on Occupancy prediction. These significant gains highlight GaussianPretrain's theoretical innovation and strong practical potential, promoting visual pre-training development for autonomous driving. Source code will be available at https://github.com/Public-BOTs/GaussianPretrain
The RoboDrive Challenge: Drive Anytime Anywhere in Any Condition
May 14, 2024



In the realm of autonomous driving, robust perception under out-of-distribution conditions is paramount for the safe deployment of vehicles. Challenges such as adverse weather, sensor malfunctions, and environmental unpredictability can severely impact the performance of autonomous systems. The 2024 RoboDrive Challenge was crafted to propel the development of driving perception technologies that can withstand and adapt to these real-world variabilities. Focusing on four pivotal tasks -- BEV detection, map segmentation, semantic occupancy prediction, and multi-view depth estimation -- the competition laid down a gauntlet to innovate and enhance system resilience against typical and atypical disturbances. This year's challenge consisted of five distinct tracks and attracted 140 registered teams from 93 institutes across 11 countries, resulting in nearly one thousand submissions evaluated through our servers. The competition culminated in 15 top-performing solutions, which introduced a range of innovative approaches including advanced data augmentation, multi-sensor fusion, self-supervised learning for error correction, and new algorithmic strategies to enhance sensor robustness. These contributions significantly advanced the state of the art, particularly in handling sensor inconsistencies and environmental variability. Participants, through collaborative efforts, pushed the boundaries of current technologies, showcasing their potential in real-world scenarios. Extensive evaluations and analyses provided insights into the effectiveness of these solutions, highlighting key trends and successful strategies for improving the resilience of driving perception systems. This challenge has set a new benchmark in the field, providing a rich repository of techniques expected to guide future research in this field.
Road Genome: A Topology Reasoning Benchmark for Scene Understanding in Autonomous Driving
Apr 20, 2023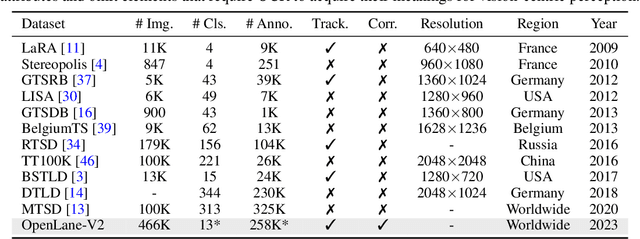
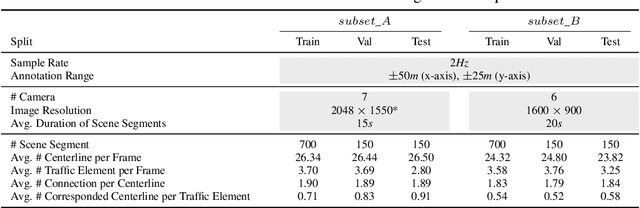
Understanding the complex traffic environment is crucial for self-driving vehicles. Existing benchmarks in autonomous driving mainly cast scene understanding as perception problems, e.g., perceiving lanelines with vanilla detection or segmentation methods. As such, we argue that the perception pipeline provides limited information for autonomous vehicles to drive in the right way, especially without the aid of high-definition (HD) map. For instance, following the wrong traffic signal at a complicated crossroad would lead to a catastrophic incident. By introducing Road Genome (OpenLane-V2), we intend to shift the community's attention and take a step further beyond perception - to the task of topology reasoning for scene structure. The goal of Road Genome is to understand the scene structure by investigating the relationship of perceived entities among traffic elements and lanes. Built on top of prevailing datasets, the newly minted benchmark comprises 2,000 sequences of multi-view images captured from diverse real-world scenarios. We annotate data with high-quality manual checks in the loop. Three subtasks compromise the gist of Road Genome, including the 3D lane detection inherited from OpenLane. We have/will host Challenges in the upcoming future at top-tiered venues.
Topology Reasoning for Driving Scenes
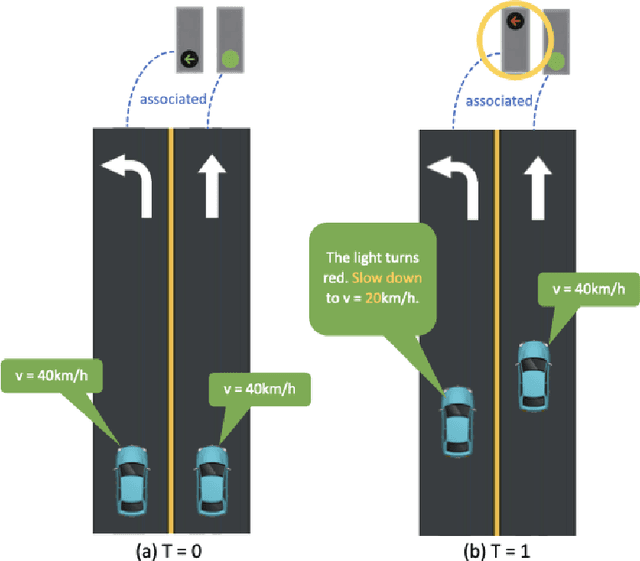
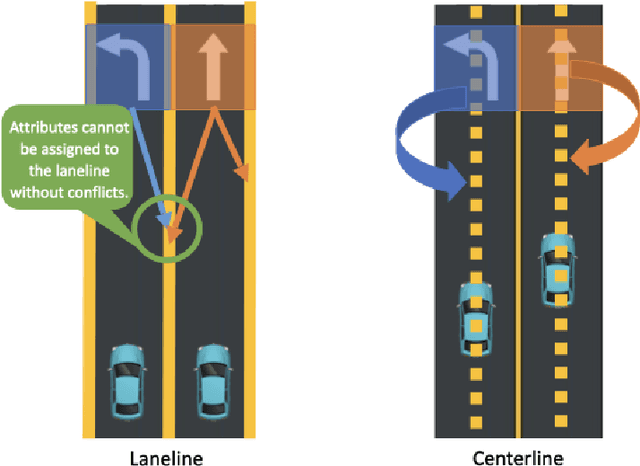
Apr 11, 2023Understanding the road genome is essential to realize autonomous driving. This highly intelligent problem contains two aspects - the connection relationship of lanes, and the assignment relationship between lanes and traffic elements, where a comprehensive topology reasoning method is vacant. On one hand, previous map learning techniques struggle in deriving lane connectivity with segmentation or laneline paradigms; or prior lane topology-oriented approaches focus on centerline detection and neglect the interaction modeling. On the other hand, the traffic element to lane assignment problem is limited in the image domain, leaving how to construct the correspondence from two views an unexplored challenge. To address these issues, we present TopoNet, the first end-to-end framework capable of abstracting traffic knowledge beyond conventional perception tasks. To capture the driving scene topology, we introduce three key designs: (1) an embedding module to incorporate semantic knowledge from 2D elements into a unified feature space; (2) a curated scene graph neural network to model relationships and enable feature interaction inside the network; (3) instead of transmitting messages arbitrarily, a scene knowledge graph is devised to differentiate prior knowledge from various types of the road genome. We evaluate TopoNet on the challenging scene understanding benchmark, OpenLane-V2, where our approach outperforms all previous works by a great margin on all perceptual and topological metrics. The code would be released soon.