 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Genome: A Topology Reasoning Benchmark for Scene Understanding in Autonomous Driving
Paper and Code
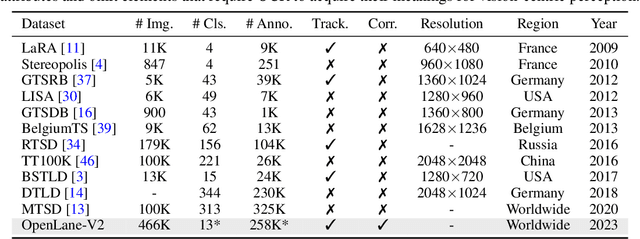
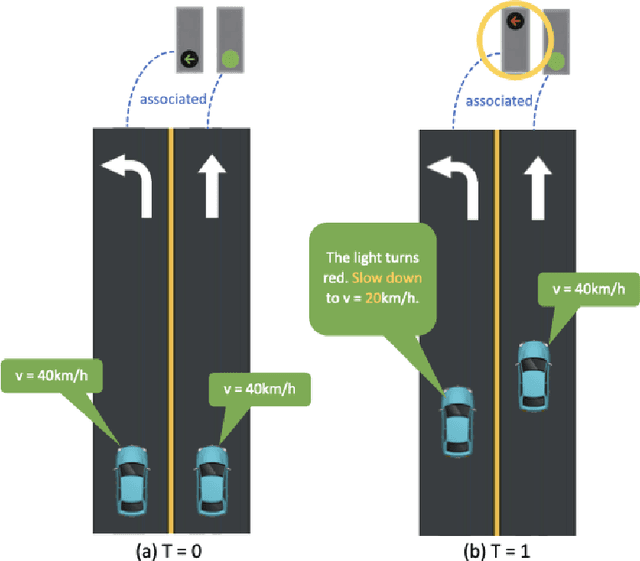
Understanding the complex traffic environment is crucial for self-driving vehicles. Existing benchmarks in autonomous driving mainly cast scene understanding as perception problems, e.g., perceiving lanelines with vanilla detection or segmentation methods. As such, we argue that the perception pipeline provides limited information for autonomous vehicles to drive in the right way, especially without the aid of high-definition (HD) map. For instance, following the wrong traffic signal at a complicated crossroad would lead to a catastrophic incident. By introducing Road Genome (OpenLane-V2), we intend to shift the community's attention and take a step further beyond perception - to the task of topology reasoning for scene structure. The goal of Road Genome is to understand the scene structure by investigating the relationship of perceived entities among traffic elements and lanes. Built on top of prevailing datasets, the newly minted benchmark comprises 2,000 sequences of multi-view images captured from diverse real-world scenarios. We annotate data with high-quality manual checks in the loop. Three subtasks compromise the gist of Road Genome, including the 3D lane detection inherited from OpenLane. We have/will host Challenges in the upcoming future at top-tiered venues.