 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLidar Upsampling with Sliced Wasserstein Distance
Jan 31, 2023



Lidar became an important component of the perception systems in autonomous driving. But challenges of training data acquisition and annotation made emphasized the role of the sensor to sensor domain adaptation. In this work, we address the problem of lidar upsampling. Learning on lidar point clouds is rather a challenging task due to their irregular and sparse structure. Here we propose a method for lidar point cloud upsampling which can reconstruct fine-grained lidar scan patterns. The key idea is to utilize edge-aware dense convolutions for both feature extraction and feature expansion. Additionally applying a more accurate Sliced Wasserstein Distance facilitates learning of the fine lidar sweep structures. This in turn enables our method to employ a one-stage upsampling paradigm without the need for coarse and fine reconstruction. We conduct several experiments to evaluate our method and demonstrate that it provides better upsampling.
Video-rate multispectral imaging in laparoscopic surgery: First-in-human application
May 28, 2021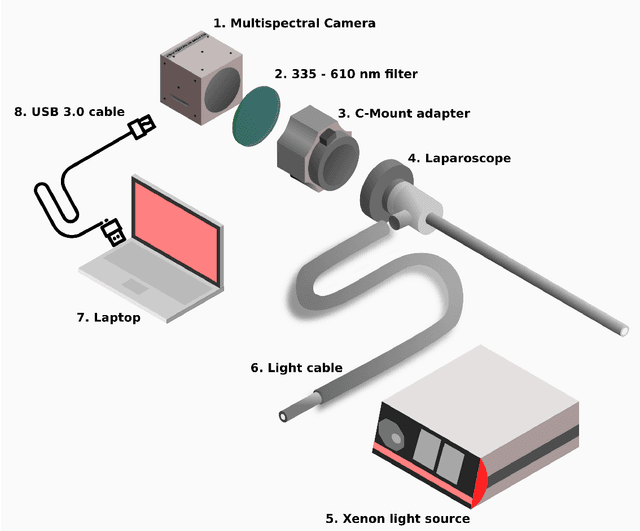
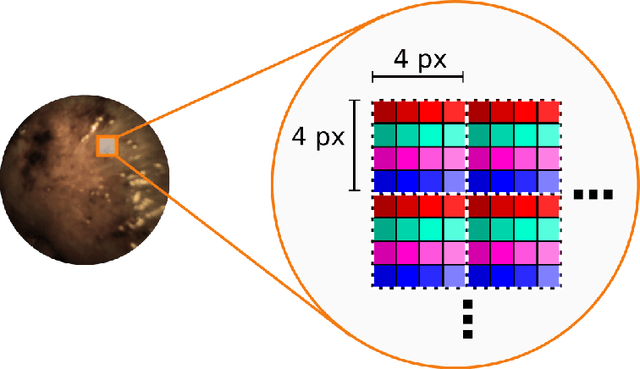
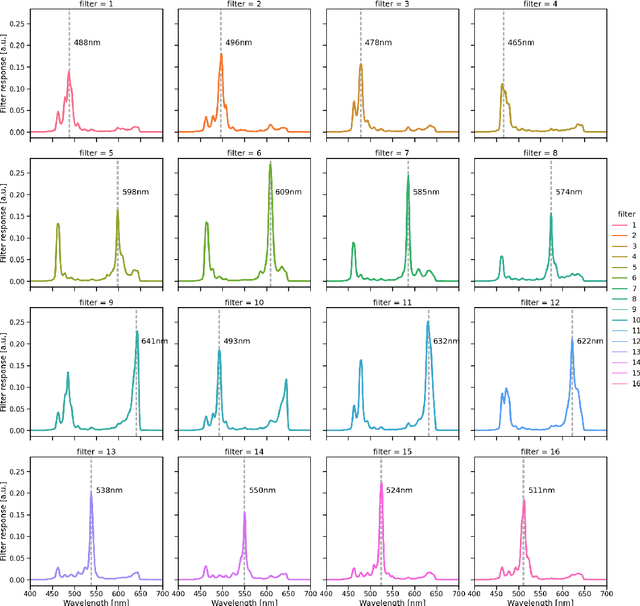
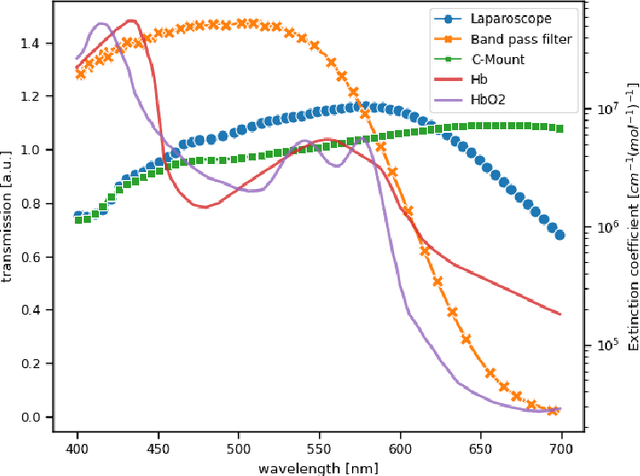
Multispectral and hyperspectral imaging (MSI/HSI) can provide clinically relevant information on morphological and functional tissue properties. Application in the operating room (OR), however, has so far been limited by complex hardware setups and slow acquisition times. To overcome these limitations, we propose a novel imaging system for video-rate spectral imaging in the clinical workflow. The system integrates a small snapshot multispectral camera with a standard laparoscope and a clinically commonly used light source, enabling the recording of multispectral images with a spectral dimension of 16 at a frame rate of 25 Hz. An ongoing in patient study shows that multispectral recordings from this system can help detect perfusion changes in partial nephrectomy surgery, thus opening the doors to a wide range of clinical applications.
Inspect, Understand, Overcome: A Survey of Practical Methods for AI Safety
Apr 29, 2021The use of deep neural networks (DNNs) in safety-critical applications like mobile health and autonomous driving is challenging due to numerous model-inherent shortcomings. These shortcomings are diverse and range from a lack of generalization over insufficient interpretability to problems with malicious inputs. Cyber-physical systems employing DNNs are therefore likely to suffer from safety concerns. In recent years, a zoo of state-of-the-art techniques aiming to address these safety concerns has emerged. This work provides a structured and broad overview of them. We first identify categories of insufficiencies to then describe research activities aiming at their detection, quantification, or mitigation. Our paper addresses both machine learning experts and safety engineers: The former ones might profit from the broad range of machine learning topics covered and discussions on limitations of recent methods. The latter ones might gain insights into the specifics of modern ML methods. We moreover hope that our contribution fuels discussions on desiderata for ML systems and strategies on how to propel existing approaches accordingly.
Uncertainty-aware performance assessment of optical imaging modalities with invertible neural networks
Mar 08, 2019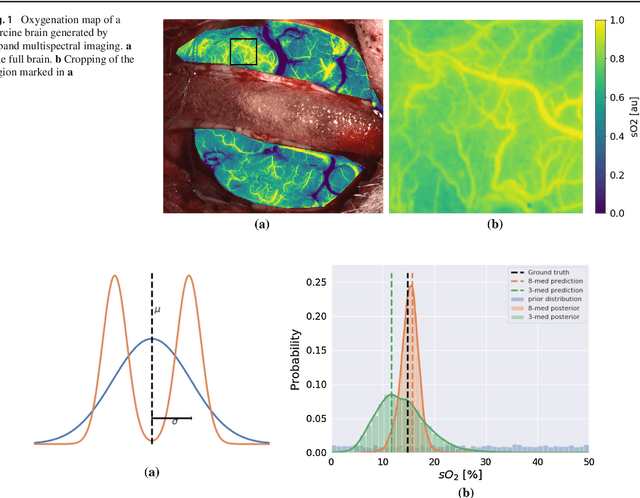
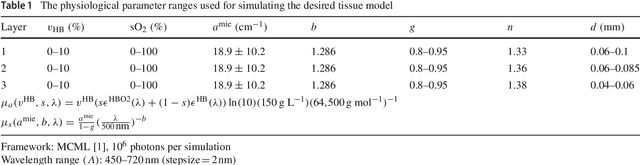
Purpose: Optical imaging is evolving as a key technique for advanced sensing in the operating room. Recent research has shown that machine learning algorithms can be used to address the inverse problem of converting pixel-wise multispectral reflectance measurements to underlying tissue parameters, such as oxygenation. Assessment of the specific hardware used in conjunction with such algorithms, however, has not properly addressed the possibility that the problem may be ill-posed. Methods: We present a novel approach to the assessment of optical imaging modalities, which is sensitive to the different types of uncertainties that may occur when inferring tissue parameters. Based on the concept of invertible neural networks, our framework goes beyond point estimates and maps each multispectral measurement to a full posterior probability distribution which is capable of representing ambiguity in the solution via multiple modes. Performance metrics for a hardware setup can then be computed from the characteristics of the posteriors. Results: Application of the assessment framework to the specific use case of camera selection for physiological parameter estimation yields the following insights: (1) Estimation of tissue oxygenation from multispectral images is a well-posed problem, while (2) blood volume fraction may not be recovered without ambiguity. (3) In general, ambiguity may be reduced by increasing the number of spectral bands in the camera. Conclusion: Our method could help to optimize optical camera design in an application-specific manner.
nnU-Net: Self-adapting Framework for U-Net-Based Medical Image Segmentation
Sep 27, 2018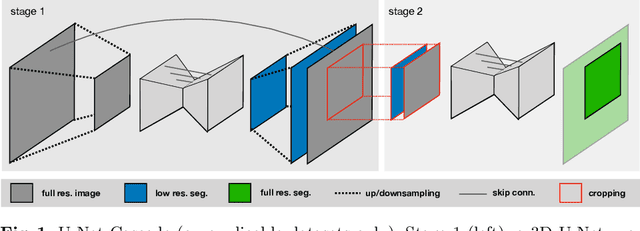
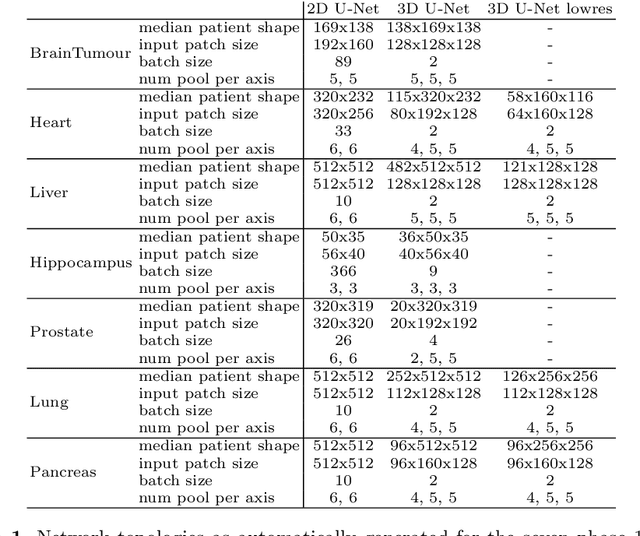
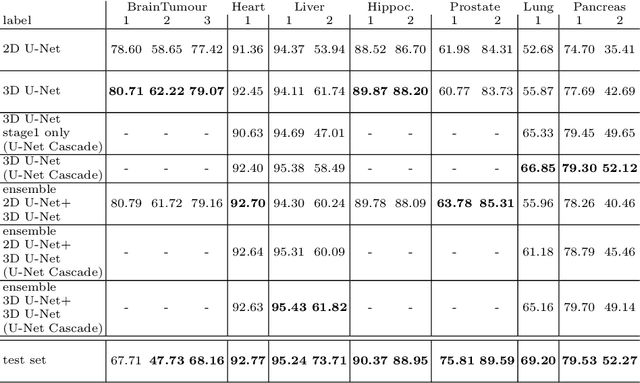
The U-Net was presented in 2015. With its straight-forward and successful architecture it quickly evolved to a commonly used benchmark in medical image segmentation. The adaptation of the U-Net to novel problems, however, comprises several degrees of freedom regarding the exact architecture, preprocessing, training and inference. These choices are not independent of each other and substantially impact the overall performance. The present paper introduces the nnU-Net ('no-new-Net'), which refers to a robust and self-adapting framework on the basis of 2D and 3D vanilla U-Nets. We argue the strong case for taking away superfluous bells and whistles of many proposed network designs and instead focus on the remaining aspects that make out the performance and generalizability of a method. We evaluate the nnU-Net in the context of the Medical Segmentation Decathlon challenge, which measures segmentation performance in ten disciplines comprising distinct entities, image modalities, image geometries and dataset sizes, with no manual adjustments between datasets allowed. At the time of manuscript submission, nnU-Net achieves the highest mean dice scores across all classes and seven phase 1 tasks (except class 1 in BrainTumour) in the online leaderboard of the challenge.
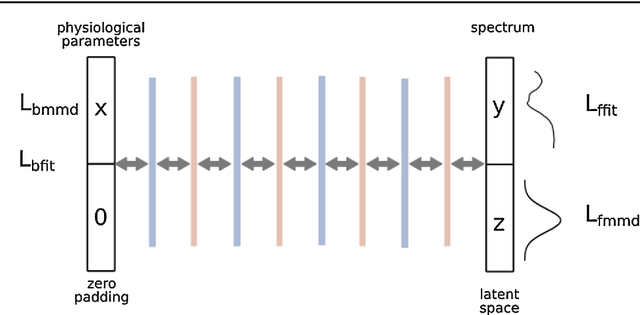
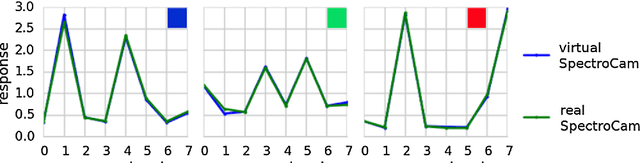
Analyzing Inverse Problems with Invertible Neural Networks
Sep 10, 2018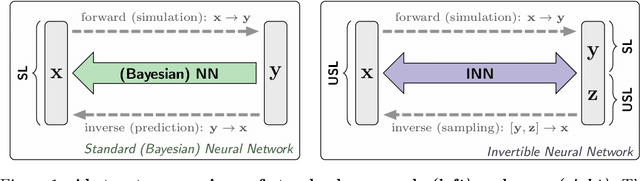
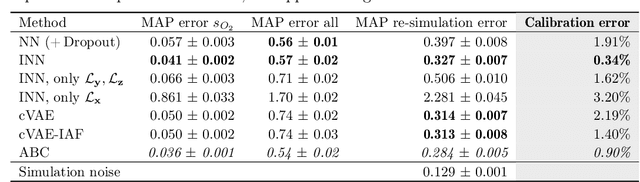
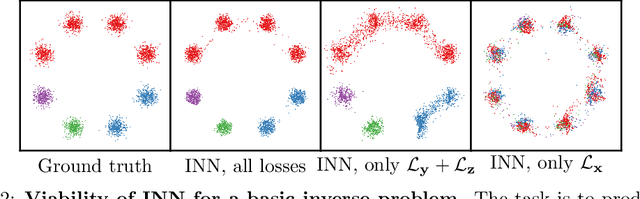
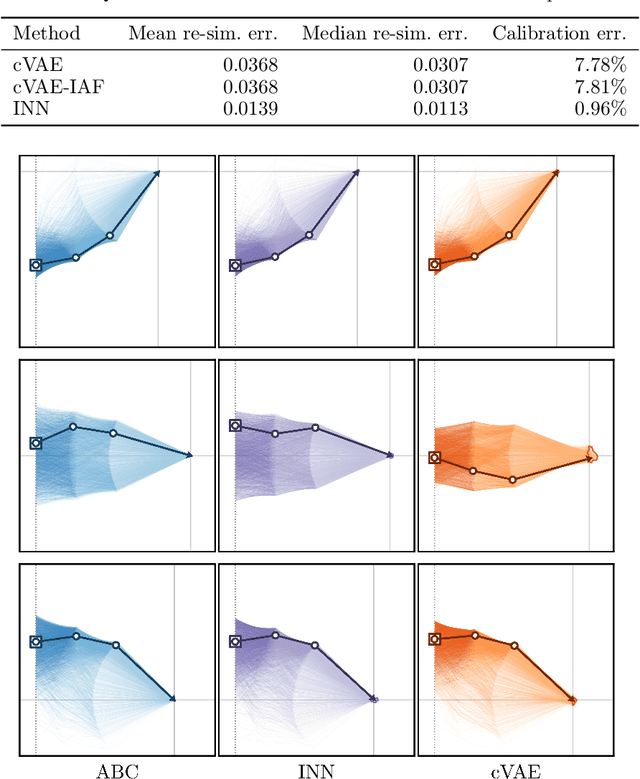
In many tasks, in particular in natural science, the goal is to determine hidden system parameters from a set of measurements. Often, the forward process from parameter- to measurement-space is a well-defined function, whereas the inverse problem is ambiguous: one measurement may map to multiple different sets of parameters. In this setting, the posterior parameter distribution, conditioned on an input measurement, has to be determined. We argue that a particular class of neural networks is well suited for this task -- so-called Invertible Neural Networks (INNs). Although INNs are not new, they have, so far, received little attention in literature. While classical neural networks attempt to solve the ambiguous inverse problem directly, INNs are able to learn it jointly with the well-defined forward process, using additional latent output variables to capture the information otherwise lost. Given a specific measurement and sampled latent variables, the inverse pass of the INN provides a full distribution over parameter space. We verify experimentally, on artificial data and real-world problems from astrophysics and medicine, that INNs are a powerful analysis tool to find multi-modalities in parameter space, to uncover parameter correlations, and to identify unrecoverable parameters.
Path Assignment Techniques For Vehicle Tracking
Feb 11, 2017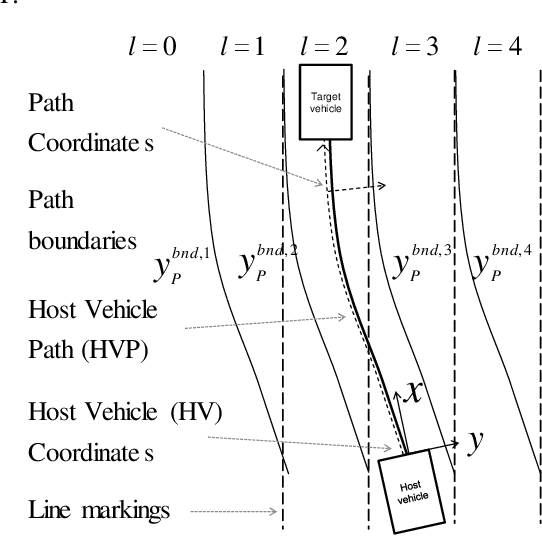
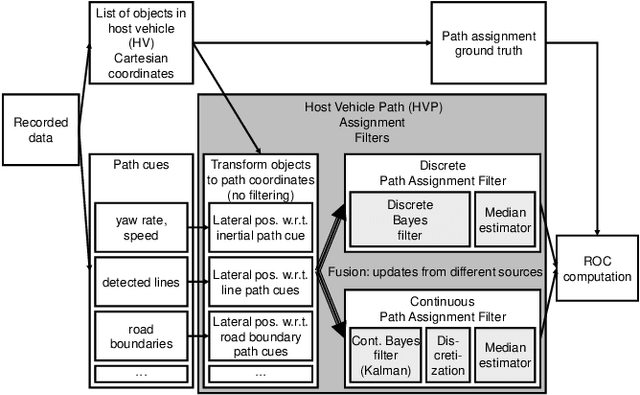
Many driver assistance systems such as Adaptive Cruise Control require the identification of the closest vehicle that is in the host vehicle's path. This entails an assignment of detected vehicles to the host vehicle path or neighboring paths. After reviewing approaches to the estimation of the host vehicle path and lane assignment techniques we introduce two methods that are motivated by the rationale to filter measured data as late in the processing stages as possible in order to avoid delays and other artifacts of intermediate filters. These filters generate discrete posterior probability distributions from which a path or "lane" index is extracted by a median estimator. The relative performance of those methods is illustrated by a ROC using experimental data and labeled ground truth data.
* 6 pages, 9 figures
A Complete Derivation Of The Association Log-Likelihood Distance For Multi-Object Tracking
Sep 08, 2015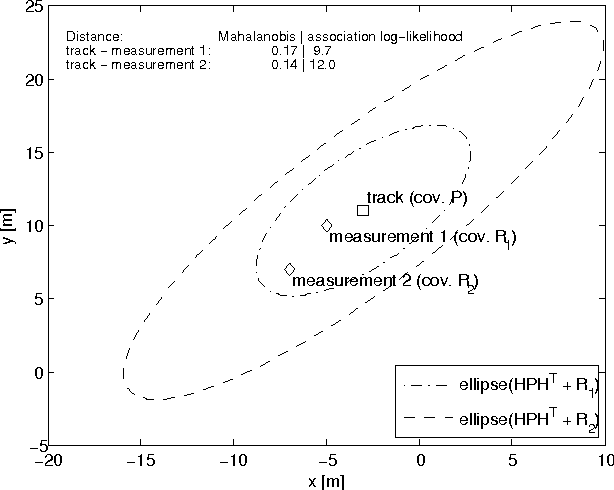
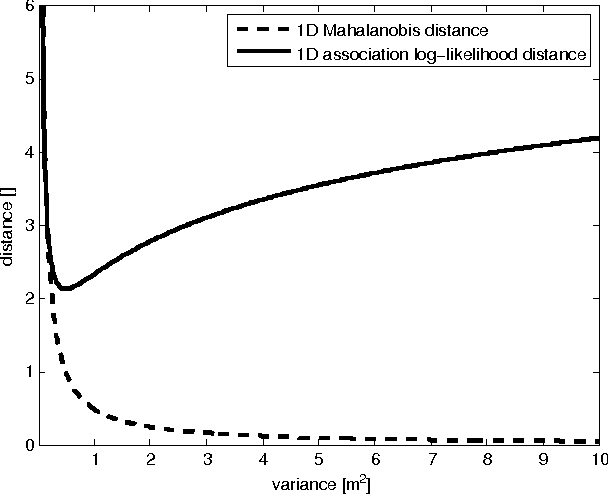
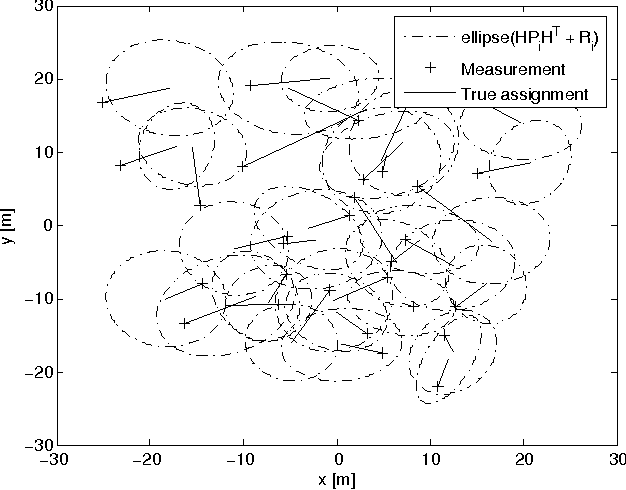
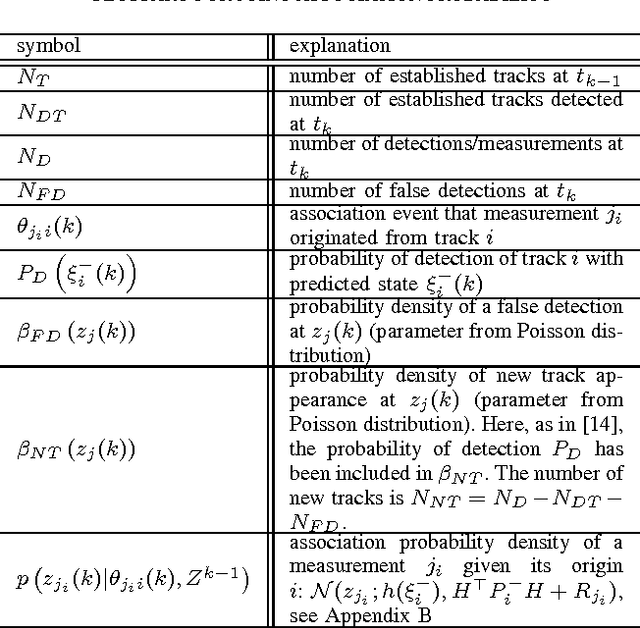
The Mahalanobis distance is commonly used in multi-object trackers for measurement-to-track association. Starting with the original definition of the Mahalanobis distance we review its use in association. Given that there is no principle in multi-object tracking that sets the Mahalanobis distance apart as a distinguished statistical distance we revisit the global association hypotheses of multiple hypothesis tracking as the most general association setting. Those association hypotheses induce a distance-like quantity for assignment which we refer to as association log-likelihood distance. We compare the ability of the Mahalanobis distance to the association log-likelihood distance to yield correct association relations in Monte-Carlo simulations. It turns out that on average the distance based on association log-likelihood performs better than the Mahalanobis distance, confirming that the maximization of global association hypotheses is a more fundamental approach to association than the minimization of a certain statistical distance measure.